MR技術在BIM領域中的適用性研究
2019-04-26 05:03:46張永明白樺
電子技術與軟件工程 2019年4期
文/張永明 白樺
1 項目概述
目前的建筑信息化模型(BIM)已經有較為完備的體系模型,它可集成整個工程生命周期中不同階段的工程信息資源于一體,以便于被工程的其他參與者調入使用。從BIM的設計過程可以看出,它不僅是數字信息的集成,更是數字信息的應用,設計、建造、管理等方面的數字化方法都有應用。
MR在BIM上的應用不但可以提高電力工程部分環節的效率,而且將使得技術研究在電力工程中的適用具備一定精準度,錄入信息更有參考價值。
2 研究路線
2.1 初步系統構架
初步系統構架如圖1所示,本次研究以功能驗證為主。
系統分三種模式:
(1)幫助模式;
(2)預覽模式;
(3)校準模式。
信息存儲方式以畫面捕捉為主要手段。功能驗證成功后續可以加以網絡拓展。
2.2 技術路線
2.2.1 硬件架構設計原則以便攜性原則、提高性設計的原則,本研究的MR技術硬件支撐采用當前市面上先進性數一數二的Microsoft Hololens開發者版本。該產品核心功能主要是依托于衍射型平顯、DLP投影芯片、SLAM技術的立體混合成像。讓使用者接收到虛擬場景與現實場景混合疊加的畫面(MR)。
2.2.2 軟件架構設計原則
就設計的精準性原則和設計正確原則,本研究設計的軟件特性:易于操作、更高效、更精準、模板零誤差。對此設計就校準功能之外額外設計了便于使用者認知操作與內容的幫助模式與預覽模式。
2.3 驗證
2.3.1 設計理論基礎
(1)通過虛擬錨點與現實標志點的映射,確定空間。該映射允許多重多次自由組合,便于設計與修改。
(2)空間錨點的位置信息賦予通過Hololens空間映射技術實現。
2.3.2 模式探究
模式一如圖2所示。
優點:這種方式對空間確定在錨點信息一一對應的情況下誤差極小,錨點的定位操作也僅限于坐標信息,適用于單次高精度校準的作業。
缺點:每次校準需要操作四個點,繁瑣;四次操作錨點,若使用者操作水平不高就會將誤差指數放大。
模式二如圖3所示。
優點:這種方式對空間確定在錨點信息一一對應的情況下誤差較小,錨點的操作次數僅為一,適用于需要多次校準的作業。
缺點:空間的確定僅通過一個錨點信息,對使用者的操作水平要求較高,尤其是虛擬映射點的旋轉信息容易產生較大誤差。
3 功能結構
涉及到的模塊絕大多數使用C#語言進行開發,開發工具使用Unity5.6.1以及Visual Studio Community 2015,基礎開發包為MixedRealityToolkit-Unity5.6,開發環境為Windows10。每個模塊實現與業務邏輯都按實際需求考慮以降低誤差為第一要素設計,各模塊協作組合。
4 系統功能
4.1 幫助模式
為用戶提高了必要的提示指導,方便用戶能在短時間快速理解軟件操作與功能。
4.2 預覽模式
通過操作用戶隨時得到可360°無死角預覽的整體框架縮略模型,使用戶可以快速對環境有個整體認知,提高校檢效率。
4.3 校檢模式
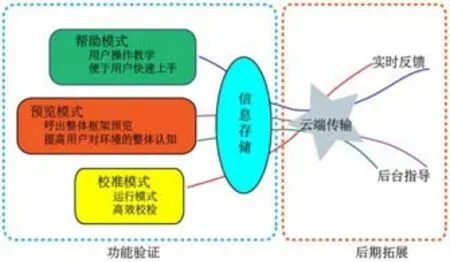
圖1:初步系統架構
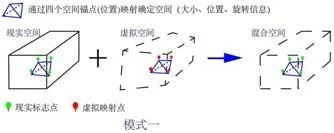
圖2:模式一
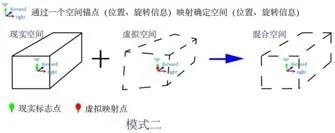
圖3:模式二
運行該模式進行真正的比對校檢,通過簡單的操作將虛擬錨點與現實標志對應結合內部邏輯就能實現虛擬標準模板在現實場景中的疊加,通過比對混合圖像的異同來確定電力工程的施工是否正確。同時也可以作為施工時的參照。
5 總結
總體上講,本次設計研究初步驗證,在HoloLens硬件沒有突破性革新的情況下有一定參考價值,在精度要求很高的建筑施工領域智能化水平還未達到期望值。需要操作人員在偏差值超過閾值之前進行人為手動校準,雖然通過設計手段將單次校準的操作和精度都提高到了設計最優。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
舒適廣告(2008年9期)2008-09-22 10:02:48