基于SystemVue汽車雷達系統研究
2019-05-08 12:45:20
計算機測量與控制 2019年4期
(煙臺汽車工程職業學院,山東 煙臺 265500)
0 引言
高級輔助駕駛系統(ADAS)是目前智能汽車發展的重要方向,其中汽車雷達在該系統中扮演了重要的角色,汽車毫米波雷達可以探測前方車輛目標,并對目標的屬性和某些場景進行分類[1]。汽車雷達可根據探測距離和功能分為:長距雷達、短距雷達和BSD掃描角雷達。
ADAS工程師根據不同功能和場景應用,利用毫米波雷達輸入信息進行汽車行為控制,為用戶打造穩定、舒適、可靠、可依賴的輔助駕駛功能,如ACC、LKA,FCW。汽車雷達傳感器能夠提供給ADAS系統目標的空間位置和目標的類型信息。因此,汽車雷達系統對目標的距離、速度、方位信息的測量至關重要。
SystemVue是一款EDA軟件,是由德科技公司(Keysight,原安捷倫電子測量部)研發的一款商用軟件,主要用于電子系統設計,可以完成通信、雷達等電子系統的信號流模塊化的仿真設計[2]。該軟件包括豐富的射頻模塊和信號處理算法庫[3]。用戶也可以根據自己的實際需求進行模塊的二次開發,可以采用C/C++,或者采用MATLAB進行定制的算法開發。軟件使用者可以根據汽車雷達的用途,設計不同功能的雷達系統,SystemVue射頻電路仿真庫包含有通用算法庫和汽車雷達仿真庫,主要包括雷達環境、雷達及目標運動平臺、收發天線、雷達信號及數據處理。
其中,雷達環境包括雷達目標仿真,軟件使用者可以根據雷達系統精度設置復雜目標多散射點模型,進而驗證數據處理的聚類和目標識別算法,汽車雷達庫針對行人目標提供了多散射點的行人目標,軟件使用者可以設置行人不同的運動狀態,接收端采集的行人回波數據經過短時傅立葉變換可以提取行人的微多普勒特性,從而完成行人識別的功能;汽車雷達庫還提供雷達雜波的仿真模塊,用戶可以根據所要評估的雷達系統選擇不同路況條件(柏油、水泥、泥土),并加入雷達的運動平臺參數,生成汽車雷達的檢測背景雜波;此外,汽車雷達仿真庫還提供了產生誤報目標,如下水道井蓋、減速帶的目標回波生成的解決方案,真實還原雷達工作的電磁環境。
毫米雷達射頻電路的性能直接影響雷達的探測精度和目標的檢測性能,SystemVue通用算法庫提供了頻率源模塊,用戶可以根據實際情況設置頻率源的相噪,進而驗證毫米波雷達的探測精度及多目標環境的弱目標檢測性能,此外影響毫米波雷達的射頻參數還包括:FMCW線性度、LNA噪聲系數、接收通道間的不一致性等等。
SystemVue仿真庫提供基于汽車雷達信號處理流程仿真解決方案,主要包括2-D FFT算法用于生成目標的距離多普勒分布,恒虛警處理(CFAR)用于多目標檢測。用戶可以根據系統設計需求采取不同的求角算法。關于雷達數據處理SystemVue仿真庫提供IMM-Kalman濾波模塊。關于目標關聯SystemVue沒有提供現成的模塊,雷達系統設計工程師可以根據仿真場景二次開發相關模塊完成多目標關聯和跟蹤處理。
1 汽車雷達仿真框架設計
目前,汽車雷達系統研發采用芯片商提供的片上集成芯片,分為射頻芯片和數字單片機芯片[4]。射頻芯片[5]主要采用壓控VCO產生中頻信號,二次上變頻到工作頻點77 GHz,限于目前毫米波芯片的制作工藝,早期的汽車雷達采用較長周期的三角連續波體制[6],單周期波形達到ms量級,長周期三角波調頻連續波進行多目標檢測會產生“鬼影”目標,需要進行額外的數據處理進行假目標剔除。隨著毫米波雷達射頻制作工藝的提升,新一代的毫米波雷達采用快調頻鋸齒波信號(Fast-Chirp),雷達相干處理周期發射短周期FMCW脈沖串信號,該種毫米波雷達與軍用PD雷達體制類似,快調頻FMCW信號可以借鑒PD雷達信號處理方式,易采用流水線處理,目標速度模糊可以采用發射不同重復頻率的脈沖串進行求解。因此,本文中毫米波雷達系統采用快調頻FMCW信號進行雷達系統設計和信號處理算法設計。
1.1 汽車雷達波形參數選擇
本仿真中汽車雷達系統設計采用快調頻FMCW信號,發射信號帶寬為200 MHz,回波信號與本地的發射信號進行去斜處理,產生頻率較低的差頻信號,信號時頻分布如圖1所示,其中實線為發射信號,虛線為回波信號。發射信號的表達式為:
S(t)=Acos[2πf0×(t-nT)+0.5ut2]
(1)
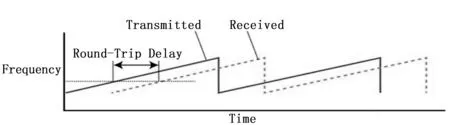
圖1 發射信號和回波信號時頻分布圖
其中:連續調頻周期T為51.2 μs,u為調頻斜率,信號帶寬為200 MHz,相干處理周期脈沖個數為128個。利用汽車雷達庫里的波形模塊,設置波形參數如圖2所示。
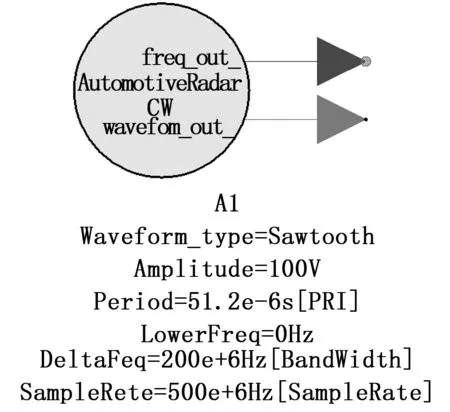
圖2 FMCW模塊參數設置
1.2 汽車雷達射頻性能仿真
SystemVue算法庫提供了射頻器件庫[7],其中頻率源模塊可以設置雷達系統頻率源相噪等級,放大器模塊可以設置放大器的噪聲系數、非線性特性。用戶可以根據實際情況設置射頻參數,通過后面的信號處理觀測射頻指標對雷達分辨力的影響。隨著汽車雷達性能的提升,汽車雷達系統將會變得越來越復雜,汽車雷達庫提供射頻多通道參數設置:幅相不一致以及IQ不平衡的參數設置,根據用戶需求可以靈活配置相控陣系統。
1.3 汽車雷達天線性能仿真
汽車雷達庫提供了相控陣發射和接收模塊,相控陣模塊可以根據用戶需求設置天線的形式、天線個數、加窗形式,并且用戶可以根據需求導入天線方向如圖3所示。

圖3 天線單元方向圖
1.4 汽車雷達信號處理
通常長距汽車雷達探測距離[8]約200~300 m即可以滿足ACC需求,發射天線口發射的電磁波經空口傳播到達目標,經由目標反射,返回接收天線,回波信號通過4個單元的接收陣列接收回波信號,每個通道信號經過LNA,回波信號與本地發射信號混頻得到差頻信號,得到IQ兩路的差頻信號,差頻信號的最大頻率范圍不超過10 MHz。本仿真中ADC采樣頻率10 MHz即可以滿足條件。經過ADC采樣得到目標回波的差頻信號經過1維FFT處理得到目標距離信息,為了減少近距離目標的旁瓣影響可以進行加窗處理,目標的距離分辨力會有所惡化。慢時間維信號回波經過第2維FFT處理得到目標速度信息,與距離維處理一致,加窗處理速度分辨力會變差。回波信號經過2D-FFT處理可以得到觀測區域的目標速度距離多普勒譜,處理結果如圖4所示。
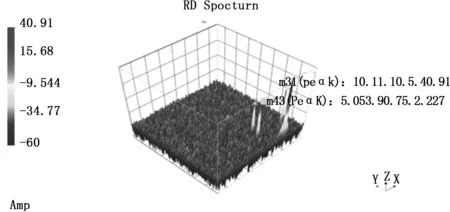
圖4 目標距離速度譜
雷達回波數據經過脈沖多普勒處理后,數據進入CFAR[9]模塊,由于汽車雷達工作場景雜波和目標非常密集,為了獲得較好的檢測性能,通常采用OS-CFAR完成多目標檢測。經過恒虛警處理后得到目標距離多普勒譜矩陣位置的序號,利用4個通道存在目標位置的采樣數據做相差求角,這樣就可以獲取目標的角度信息,其處理流程如圖5所示。
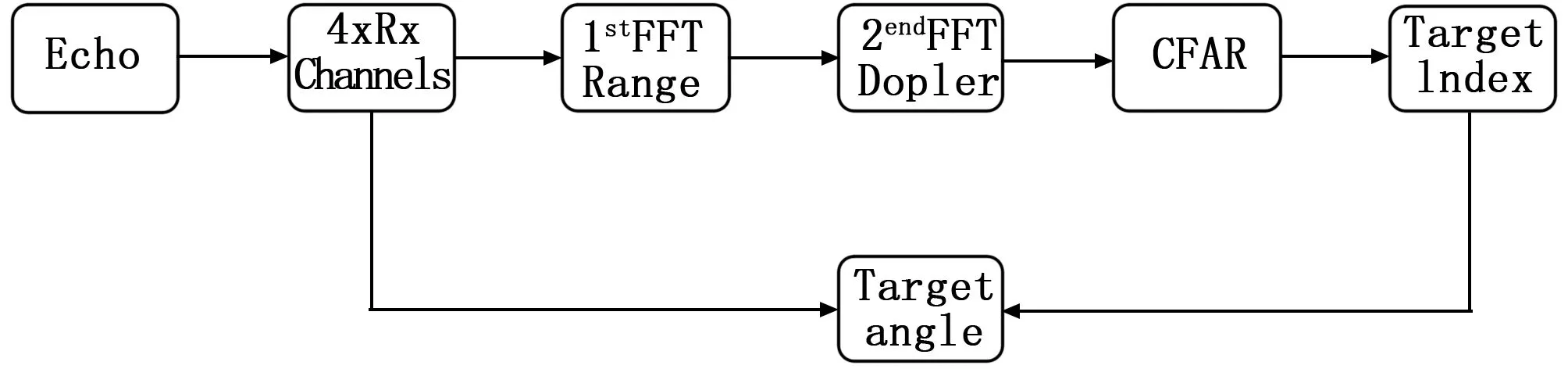
圖5 信號處理流程
2 汽車雷達超分辨算法改進
限于成本的約束,目前汽車雷達通常只有4個接收通道,因此汽車雷達無法采用類似軍用雷達的和差測角技術,而是主要采用相差測角的方式來完成角度測量,當雷達距離分辨力不高的情況下,該算法可以滿足一般場景的需求,而當目標落入相同距離和多普勒門情況,相差求角方法將會失效。對于較高分辨雷達,高密集目標場景不同散射點落入同一個距離和多普勒門的概率較高,為了在空間區分不同散射點,通常采用超分辨算法[10],如MUSIC、ESPRIT或其算法改進。
由于波束形成受限于陣列長度,基于波束形成的非參數化的波達角估計分辨率受限于瑞利極限。超瑞利極限的方法稱為超分辨方法,最早的超分辨算法是著名的MUSIC和ESPRIT算法,這兩種算法屬于特征結構的子空間方法。子空間方法建立在傳感器個數比信源個數多的基礎上,經過對回波快拍數據協方差數據進行特征值或奇異值分解,則目標的信號分量一定位于一個低秩的子空間。在特定條件下,這個子空間將確定信號的波達方向,由于線性空間的概念引入角度估計中,子空間算法實現了角度估計分辨率的突破。汽車雷達通常單元個數比較少,因此可以分辨的目標有限。汽車雷達設計者應根據雷達不同用途,平衡雷達帶寬、角度分辨力、天線單元個數的參數選取。
在實際處理中,得到的數據是在有限的時間范圍內的有限快拍,在這段時間內認為空間源信號的方位不發生變化,空間源信號的包絡隨時間變化滿足平穩隨機過程,其統計特性不隨時間變化。此外,陣列信號處理算法需要知道入射信號的源數,實際當中信源個數往往未知,然后再估計信源的方向。汽車雷達的快拍信號是經過距離多普勒處理之后的峰值數據,通常同一個距離多普勒門的信源較少,可以直接根據數據協方差較大的特征值個數判斷信源數,經過速度距離處理后的數據的SNR較高,因此估計的目標的信源個數比較準確。
此外,超分辨算法需要經過特征值分解及角度搜索掃描,由于限于汽車雷達DSP處理能力,因此需對超分辨算法進行變換,將信號的復數數據經過矩陣變換轉化為實數,因此數據協方差數據特征值分解轉換為實數特征值分解,復數角度搜索轉換為實數角度搜索,大大減少了數據的存儲和處理負擔。
首先給出經典譜MUSIC估計公式:
(2)
其中:ei為量測數據特征向量,a(θ)為角度搜索向量。
通常超分辨算法需要對快拍協方差數據求逆運算,然而汽車雷達的信號處理芯片處理能力較差,因此,需要對超分辨算法進行改進以降低求角算法的運算量。本文提出采用酉矩陣變換MUSIC算法進行改進,具體方法如下:
1)構造U矩陣:
(3)
天線單元數為奇數,
(4)
天線單元數為偶數。
2)構造角度掃描向量:
a′(θ)=Ua(θ)
(5)
a(θ)=[1,ejφ(θ),ej2φ(θ),…,ej(M-1)φ(θ)]T
(6)
=e-j(M-1)φ(θ)/2a(θ)=
[e-j(M-1)φ(θ)/2,…,e-j(1/2)φ(θ),ej(1/2)φ(θ),…,ej(M-1)φ(θ)/2]T
(7)
因此得到掃描向量表達式為:
(8)

(9)
可見,采用酉變換MUSIC算法重構快拍協方差數據,將快拍協方差轉變為實數矩陣,從而將求逆運算和角度搜索簡化為實數運算,因此將大大降低汽車雷達超分辨求角的運算量。
本文使用SystemVue里面的MatlabScript模塊嵌入酉變換MUSIC算法來實現,得到空間譜估計結果如圖6所示。
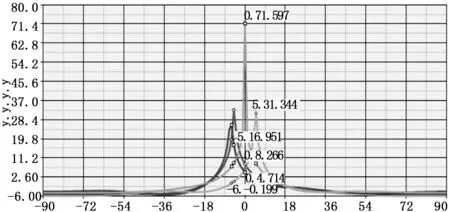
圖6 目標角度
3 仿真結果分析
本文采用的基于SystemVue汽車雷達系統的仿真步驟如下:
1)構建雷達傳感器平臺參數,設置汽車雷達車載平臺信息,初始坐標、初始速度、加速度信息。構建被探測目標的RCS散射點分布,目標初始坐標、速度、加速度信息,用也可以根據實際需求控制平臺橫滾,縱滾,方位角度控制平臺和目標做復雜運動,或通過文件形式導入目標運動軌跡;
2)構建目標相對于天線位置關系,該仿真流程主要是計算目標相對于天線陣面的角度關系,雷達坐標系下可以輸出目標相對于雷達的方位角以及俯仰角;
3)構建發射波形以及發射參數通道設置,用可以根據不同的仿真條件設置波形的發射周期,脈寬,線型調頻斜率。發射射頻通道可以采用單通道發射,多通道發射或者不同通道分時發射;
4)設置發射天線天線參數,包括天線單元個數,天線單元間距,發射接收天線根據目標的方位和俯仰角度以及平臺與目標的相對位置和運動關系生成目標回波數據;
5)接收通道采用多通道接收通道,可以根據求角精度配置接收單元的個數,設置低噪聲放大器參數,包括:LNA的噪聲系數以及放大器線型度設置,根據波形的工作帶寬和濾波器參數加入通道噪聲;根據通道不一致性配置不同通道的幅度誤差、相位誤差,以及各自通道IQ不平衡參數。
6)設置頻率相噪參數,將回波信號與本地信號進行去斜處理,通過ADC模塊進行數字化,設置ADC采樣頻率,量化位數,峰峰值等參數,將數字化的回波數據進行信號處理,根據不同處理進行不同的加窗處理,完成速度距離頻譜估計;對距離維數據做CFAR檢測,記錄所有目標的采樣點序號,將所有通道下的目標復數數據分組存儲,利用該數據做超分辨處理。
7)利用目標分組的通道數據做求角運算,按照第2節的算法對矩陣進行酉變換處理,并對酉變換后的實數數據進行協方差奇異值分解,根據奇異值大小確定目標的個數,利用實數掃描矩陣求得目標空間頻譜,提取峰值點的角度信息,完整提取目標距離、速度、方位信息。
通過以上流程,基于SystemVue可以完成汽車雷達整系統的設計,包括雷達波形生成,射頻器件仿真,雷達天線,雷達電磁環境模擬以及雷達信號處理。根據仿真預設的目標空間信息,通過信號處理抽取了目標的距離、速度及角度信息。根據表1可以對比雷達測量值與真值的差別,進而可以估計雷達的測量精度。
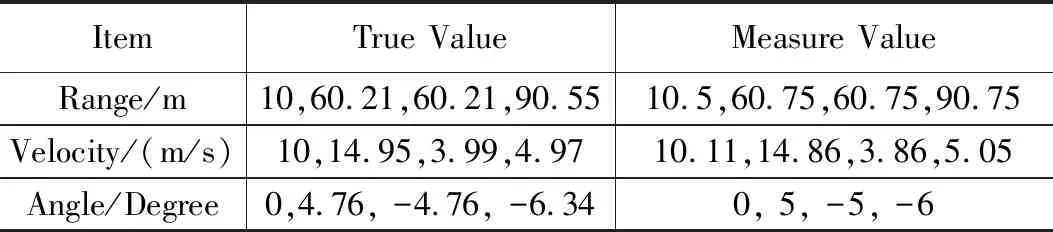
表1 目標真值與測量值對比
4 結論
本文基于SystemVue實現了汽車雷達系統的模擬仿真,并給出了針對汽車雷達目標信息提取的完整解決方案。本文利用SystemVue汽車雷達仿真庫完成了包括雷達射頻和信號處理的系統性能評估,與單純的信號處理仿真相比,本文考慮了所有可能影響雷達性能的因素,如射頻、雷達工作的電磁環境。本文解決方案更真實、更全面地反映了雷達系統的性能。同時,本文針對汽車雷達信號處理芯片處理能力較差的問題,提出了改進的酉變換MUSIC測角算法,大大降低了汽車雷達超分辨求角的運算量。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車與安全(2019年9期)2019-11-22 09:48:03
中國生殖健康(2019年3期)2019-02-01 06:12:26
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
決策探索(2014年21期)2014-11-25 12:29:50
環球時報(2010-02-11)2010-02-11 13:34:15
