虛擬儀器下的生物摩擦力測試系統設計
2019-05-16 01:04:34李于洪賀同見
自動化儀表 2019年2期
郭 巖,李于洪,張 賓,賀同見,宋 偉
(成都市特種設備檢驗院,四川 成都 610031)
0 引言
隨著醫療技術的發展,人們對醫療水平的要求越來越高。在手術操作過程中,由于器械臂長、硬、直、可操作性差的缺點,手術器械容易對病變組織或者周圍健康組織造成損傷,使病人受到不必要的傷害。因此,外科醫生所面臨的巨大挑戰,是他們只能根據自身視覺信息來判斷器械是否對組織特性造成影響。這給患者帶來巨大的安全隱患[1]。對此,設計一套不同運動狀態下的力采集系統,組建數據庫來完善機器人的力反饋系統,提高手術水平的精準度,是智能化醫療器械發展的必然趨勢。
2012年,由于一名外科醫生的過失,致使一名女性患者死于子宮切除術。據英國《每日郵報》報道:目前廣泛使用的“達文西“手術機器人,它在執行手術操作過程中打了一個躺在手術臺的病人[2],給患者造成意外損傷。以上案例說明力觸覺反饋系統對智能化手術機器人的重要性。為了模擬手術操作的運動過程,虛擬儀器下的生物摩擦力測試裝置應能夠以不同的速度和角度進行模擬手術操作試驗,實時監測接觸力的變化,并組建可靠數據庫。
1 試驗裝置系統工作原理
本文設計的試驗裝置結構主要由伺服電機、絲杠模組、三角卡盤、測試端頭和試驗臺組成。根據手術操作實際情況,結合低速、輕載、微量進給的特點,該機構采用絲杠模組實現直線運動。該傳動方式具有精度高、傳動效率高、同步性好、可靠耐用的優點,符合試驗要求。伺服電機Ⅰ轉動過程中產生的動力通過絲杠進行傳動,并配合絲杠滑塊上面的伺服電機Ⅱ傳遞給裝有光纖傳感器的測試端頭,實現測試端頭的直線運動和旋轉運動。
試驗裝置結構如圖1所示。
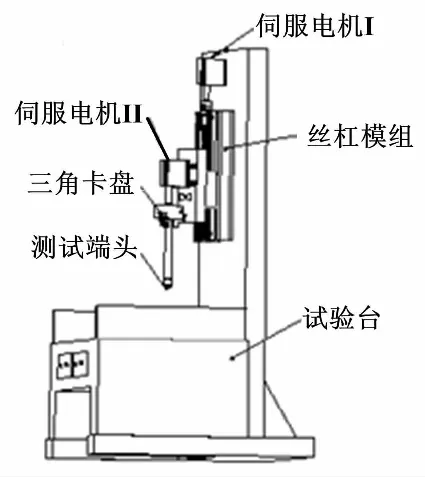
圖1 試驗裝置結構圖
在試驗裝置模擬手術操作過程中,需要使測量端頭感知器械與組織接觸的力。因此,根據上述的裝置的結構特點及試驗要求,在力傳感器中,選擇微光纖壓力傳感器作為敏感元件。它的靈敏度達到±0.04 rad/MPa,測量范圍在0~60 MPa,符合要求。
微光纖傳感器的安裝結構如圖2所示。
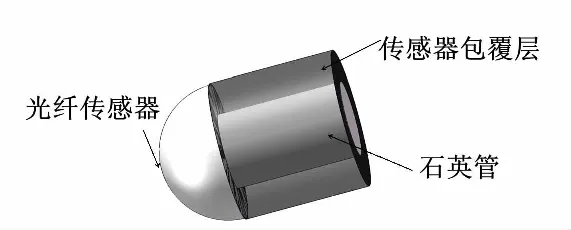
圖2 微光纖傳感器的安裝結構圖
測量端頭在以一定的速度進入腸道的過程中,測試端頭石英管以及傳感器包覆層均會產生變形,使微光纖壓力傳感器膜片發生偏移。偏移量ΔS與壓力ΔP之間的關系為[3]:
(1)
式中:S、h、R1、R2分別為空氣腔的腔長、膜片的厚度、光纖的半徑、膜片的半徑;μ為泊松半徑;E為楊氏模量。
在式(1)中,S、h、R1、R2均已知,從而可以得出偏移量ΔS與壓力ΔP之間的數值關系。然而,膜片的偏移會引起腔長發生變化,導致光纖內入射光和反射光的光程差,引起相位發生變化。相位變化量Δα和膜片的偏移量ΔS也具有一定的關系,關系式為:
(2)
把式(1)代入式(2),簡化后得到相位差Δα與壓力變化ΔP之間的關系為:
(3)
式中:λ、ΔS、S、μ、R1、R2、h分別為Si720的平均波長、壓力膜片的中心偏移量、空氣腔的腔長、泊松半徑、光纖的半徑、膜片的半徑、膜片的厚度;E為楊氏模量;ΔP為壓力變化;Δα為F-P腔相位變化量。
因此,式(3)即為測試裝置的測量模型公式。根據Si720的平均波長和式(3),即可計算出測試端頭與生物腸道之間接觸力的大小。
2 硬件設計
測量裝置系統的硬件主要由計算機、西門子可編程邏輯控制器(programmable logic controller,PLC)、運動模組、光纖傳感器、采集系統、松下伺服電機及驅動器、24 V直流電源、組裝箱體和清潔裝置組成。
試驗裝置硬件系統結構如圖3所示。
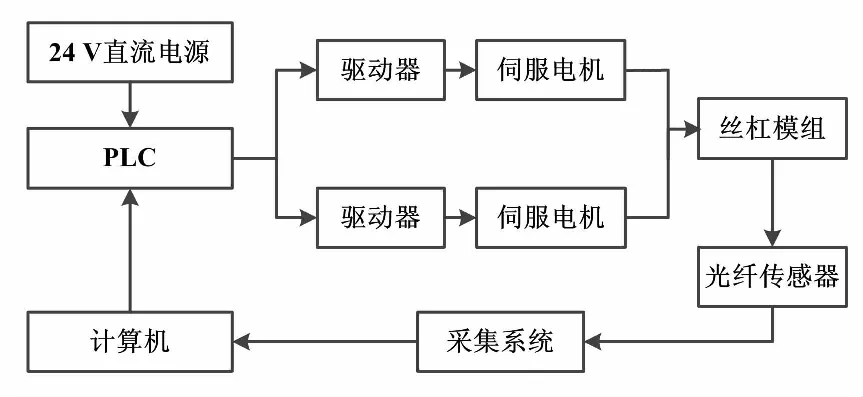
圖3 試驗裝置硬件系統結構圖
2.1 西門子PLC
西門子PLC采用的是S7-200 SMART 系列 ST20。它將微處理器、集成電源、輸入電路和輸出電路組合到一個結構緊湊的外殼中,形成功能強大的Micro PLC。ST20擁有2個脈沖輸出、12個數字輸入和8個數字輸出,滿足2個電機的控制要求,可通過OPC協議方便地和上位機進行通信。
2.2 微光纖傳感器
微光纖傳感器通過外界的作用力,引起壓力膜片的偏移并改變腔長,從而導致腔內光信號的傳輸路徑發生改變;根據光譜的移動解調出腔長的變化,得到相位變化量;再通過壓力校準儀,轉化成壓力的大小[3]。微光纖壓力傳感器具有結構緊湊、穩定性好、精度高、體積小、耐高溫和耐腐蝕的特點,廣泛應用于生物醫療、食品安全等領域[4]。
2.3 解調儀
微光纖壓力傳感器收到的光譜信號變化,要通過Si720解調儀解調才能轉化為實際需要的參數量。一般通過強度解調和相位解調這兩種方法進行解調。強度解調就是對輸出光信號的光強進行解調,該方法精度較低、范圍較小。相位解調就是通過對輸出信號的相位進行求解來實現測量。其輸入光必須為寬帶光源,通過腔長的變化得到輸出信號相位的變化。這種方法測量精度高,所以本文采用相位解調[5]。
3 軟件設計
該系統實現測試端頭以不同的直線速度和不同旋轉角度進行運動。測試裝置運動的監控分析系統,采用組態王與西門子PLC混合編程的方式進行設計。組態王軟件可以實時收集運動參數數據和通過PLC遠程控制運動過程,生成Excel表格供分析數據使用[6];PLC完成伺服電機的脈沖發送。軟件系統設計主要由PLC控制程序、數據采集處理程序和人機界面程序組成。
整個系統的數據采集都是實時讀取信號處理電路的輸出信號,然后通過A/D轉換傳輸到計算機。計算機對采集到的數據進行實時處理和分析,并實時顯示采集卡上傳的數據。
3.1 人機界面軟件設計
該系統以計算機為基礎,實現運動的控制及采集的監測,集計算機、模塊化硬件和圖形化的編程軟件于一體,搭建滿足手術模擬需求的按鈕。在計算機終端裝有基于組態王開發的人機界面。操作人員只需在界面上輸入相關的參數(速度、位移),就能夠讓設備按需運轉。
具體的搭建過程如下。
首先,新建工程進入當前工程開發環境,定義I/O設備,單機“COM1”后,進行串口設置,將波特率設置為“9 600”,奇偶檢驗設為“偶檢驗”,數據位設置為“8”,停止位設置為“1”,點擊確定。
然后,進行工程組態窗口設計,繪制按鈕,并根據系統工程設定的需要新建各個數據變量。
最后,進行動畫連接,寫入位移、速度中間變量的腳本程序,試運行。
通過人機界面,可以對被控量進行設定,對過程值實時進行監控,進而在線分析各控制參數在控制過程中的作用。
3.2 PLC軟件設計
裝置系統使用的編程軟件是STEP 7-Micro WIN SMART。根據試驗要求,PLC必須與組態王通信才能實現監控。
定義組態王軟件中的變量參數,使其能夠讀寫PLC的輸入輸出地址,從而接收外部信號、控制PLC的輸出[7]。對兩臺伺服電機進行控制,具體的控制為:絲杠開始使能啟動,在絲杠速度設定中輸入“1”,絲杠以1 cm/s的速度直線運動;絲杠位移量設定值為“10”,當絲杠行走10 s時,絲杠停止運動;絲杠運行過程中,也可以通過絲杠停止指令使絲杠強行停止;絲杠結束使能關閉,絲杠速度最大值設定為2.5 cm/s。當絲杠走完有效行程時,報警指令開啟,保護設備受損。旋轉運動的控制方式和絲杠相同,速度最大值設定為90 (°)/s。
控制程序流程如圖4所示。
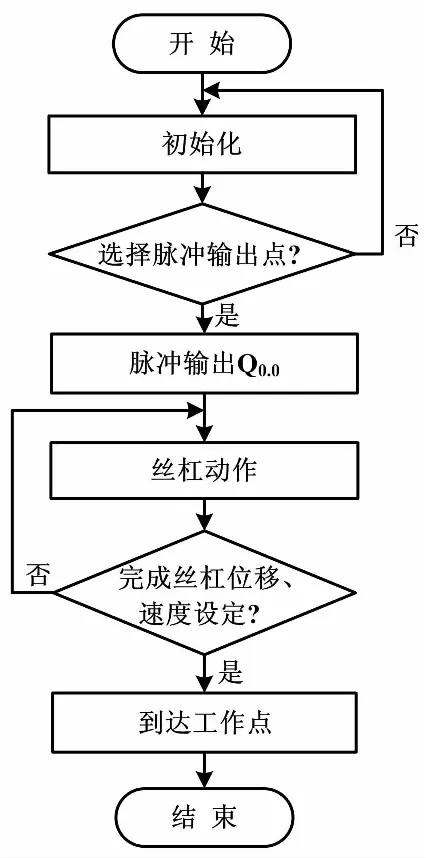
圖4 控制程序流程圖
4 試驗研究
以課題組所設計的器械與生物腸道接觸力的測試裝置為基礎,根據上述的力信號采集硬件和軟件系統,組裝了測試裝置,并進行試驗。測試端頭以1 cm/s的直線速度和30 (°)/s的旋轉速度運行2 s進入兔子腸道,并以相同的運動狀態在腸道中運行5 s 。肛門具有自動收縮的特性,所以測試端頭剛進入腸道時,曲線急速上升,達到頂點處,測試端頭的光纖傳感器變形最大,器械對腸道的作用力最大。端頭進入腸道以后,以相同的運動狀態繼續運動。此時,傳感器主要受到腸道內部分泌的液體以及腸道自身的蠕動力的作用[8],受力迅速減小并趨于平緩,相位差迅速減小也趨于平緩。
整個運動的過程中,最大相位差時沒有對腸道造成損傷,則記錄此時的相位差,并保存至數據庫。在全程的試驗過程中,由于設備精度和試驗條件的限制,所測量的數據相對于理論數據會產生一些偏差,但仍然具有一定的參考價值。試驗表明:該裝置操作簡便、功能完善、精度可靠,可作為力反饋系統數據庫收集的試驗平臺,為相關技術的深層次研究提供了一個有效的分析監控平臺。
5 結束語
本文研究了西門子PLC與組態王軟件協同配合的設計方案[9],所設計的試驗裝置實現了手術器械與生物腸道之間的力信號采集監控。
將微光纖傳感器、PLC控制器和組態王的虛擬儀器技術相結合,應用于器械末端的信號采集系統中,實現了數據采集的智能化和一體化。試驗裝置采集到的相位信號,通過砝碼校準也反映了力的信息[10]。將采集到的測試端頭在不同運動狀態下進入腸道內的相位變化信息,儲存到數據庫,為今后智能手術機器人力反饋系統奠定了數據基礎。