基于仿生肌肉的柔性氣動上肢助力產(chǎn)品設(shè)計
2019-05-20 02:52:08劉月林陳佳宇
設(shè)計 2019年7期
劉月林 陳佳宇
引言
老年肌力受損患者由于肌力受限,在生活等方面有諸多不便,患者多采用自主恢復(fù)訓練,患肢的康復(fù)訓練方式較為單一,運動不當易對患臂產(chǎn)生二次傷害,而訓練程度不夠,患臂肌肉萎縮會加重肌力受損病情。長時間的患臂訓練不當,會影響肌力受損患者的肌力恢復(fù)進程,嚴重時會引發(fā)患者焦慮、自卑等心理疾病。市場中現(xiàn)有上肢助力產(chǎn)品多針對偏癱、老年康復(fù)等用戶,且多采用剛性外骨骼結(jié)構(gòu)訓練式或體感游戲式康復(fù)模式,缺乏針對肌力受損患者的康復(fù)產(chǎn)品。本文通過采用仿生肌肉的仿生結(jié)構(gòu),設(shè)計一款柔性氣動上肢助力產(chǎn)品,培養(yǎng)用戶的自主恢復(fù)意識,提高其患臂的恢復(fù)效率,減輕患者病體壓力與心理壓力。
一、上肢助力產(chǎn)品設(shè)計現(xiàn)狀研究
醫(yī)院使用的訓練手部與腕部的剛性外骨骼式康復(fù)助力器械,主要利用彈簧的彈性形變牽引手部及腕部運動,從而達到訓練目的。外骨骼式助力器所設(shè)定的彈性力矩,能夠固定患肢的活動范圍,但只能使其做往復(fù)屈伸運動,訓練模式較為單一,有一定的局限性。現(xiàn)今普遍使用于康復(fù)中心、老年社區(qū)的虛擬游戲訓練系統(tǒng).建立了網(wǎng)絡(luò)手套與虛擬手的映射關(guān)系,實現(xiàn)人機交互。虛擬現(xiàn)實的上肢康復(fù)手機器人訓練系統(tǒng),具有碰撞檢測和力反饋功能,使用戶在虛擬環(huán)境中與物體交互時感覺更加真實。
目前國外對上肢助力的產(chǎn)品與系統(tǒng)性訓練研究較多,但是對于設(shè)備的結(jié)構(gòu)輕便性設(shè)計考慮相對較少,針對特有疾病的系統(tǒng)性訓練研究層次劃分不夠明確。而國內(nèi)有關(guān)康復(fù)機器人的研發(fā)中,對于上肢功能康復(fù)訓練機器人還處于起步階段,研發(fā)者大多來自于原先工業(yè)機器人領(lǐng)域,國內(nèi)康復(fù)機器人產(chǎn)品也大都直接移植工業(yè)機器人技術(shù)。重慶大學研制的三自由度上肢運動康復(fù)助力裝置,是一種利用步進電機驅(qū)動的多自由度機械臂系統(tǒng),能夠根據(jù)用戶的運動意圖輔助患肢完成取物等運動任務(wù)。該三自由度機械臂采用運動軌跡追蹤、運動速度一時間等參數(shù)進行了編程設(shè)計能夠根據(jù)患者的肩部、肘部、腕部關(guān)節(jié)的運動生理性質(zhì),進行相應(yīng)的階段性控制。哈爾濱工業(yè)大學研制的五自由度外骨骼式上肢康復(fù)機器人系統(tǒng),分別對用戶的肩部、肘部、腕部的關(guān)節(jié)屈伸、旋轉(zhuǎn)動作進行分解,再由電機控制機械臂各個關(guān)節(jié)的運動。用戶佩戴機械臂后,設(shè)備通過用戶的行為動作采集皮膚表面肌電信號,完成患臂的康復(fù)訓練。
總體上,市場中現(xiàn)有上肢助力設(shè)備主要分為兩類:第一類,外骨骼式剛性助力結(jié)構(gòu),且均需連接設(shè)備。患者佩戴并操作助力器械時,產(chǎn)品較為笨重,輕便性不佳,操作過程也較為復(fù)雜;第二類,VR游戲沉浸及認知訓練類,但此類產(chǎn)品內(nèi)部傳感器與人體適配性”有待完善,且不適用于老年骨折、肌力受損等特殊病癥。我國針對上肢助力產(chǎn)品的研究已取得一定成果,但存在一些設(shè)計上的不足。
二、上肢生物力學分析與仿生肌肉模型
(一)上肢生物力學分析:肌力受損者常見于骨折恢復(fù)期與肌肉非炎癥性疾病。骨折分為固定期(6周)與恢復(fù)期(6周-13周)兩個時期,在恢復(fù)期間,由于骨骼固定期較長,肌肉主要表現(xiàn)為肌肉僵化,肌收縮力減退;肌肉非炎癥性疾病,主要表現(xiàn)為肌收縮力減退或消失以及肌肉萎縮等。
本研究所針對的人群為上肢肌力受損者。通過對上肢骨折患者行為過程的觀察研究得出,病患在患病恢復(fù)過程中,需承受來自心理、生理的雙重壓力。從心理層面分析,患者存在焦慮、自卑、易怒、封閉等心理狀態(tài),不利于患臂的恢復(fù);從生理層面分析,肌力受損者患臂呈現(xiàn)屈伸不順、無法承重等狀態(tài),患者患臂應(yīng)在恢復(fù)期進行被動、主動訓練,便于患臂肌肉的機能恢復(fù)。
肩部在運動過程中,運動范圍隨手臂抬舉高度的變化而變化,肌肉組織隨肩部運動改變運動狀態(tài)。定義以旁觀者為參照,肩部逆時針旋轉(zhuǎn)為“屈”,順時針旋轉(zhuǎn)為“伸”。肩部做逆時針旋轉(zhuǎn)動作時,肌肉組織呈收縮狀態(tài);肩部做順時針旋轉(zhuǎn)動作時,肌肉組織呈拉長狀態(tài),肩部末施力時,肌肉組織呈靜止狀態(tài)。故上肢助力器的設(shè)計過程中,應(yīng)注意患者的上肢肌肉僵直狀態(tài),在不對其造成二次傷害的基礎(chǔ)上,帶動患者手臂做固定力范圍下的助力動作,達到鍛煉患肢、恢復(fù)患者肌力的作用。
手部承重時,手臂等同于速度杠桿,肘部為杠桿支點,肌肉肌腱末端為動力點(肌拉力點),手部承重時為阻力點(受力點)。手部承重過程中,上臂肌肉以肌拉力點支撐,施加肌力,肌力大小與手部所承重力大小相對應(yīng)。將肩部肌肉所受力為垂直方向轉(zhuǎn)動分力與水平方向加固分力,轉(zhuǎn)動分力與加固分力合成為肌拉力,肌拉力與水平夾角為拉力角。肌力正常時,轉(zhuǎn)動分力與加固分力正常合稱為肌拉力,肌力受損時,手部承重減弱,拉力角相對常量縮小,肌拉力減弱,所分解的轉(zhuǎn)動分力與加固分力縮小,肌力受損肌拉力長時間小于正常肌拉力,會導(dǎo)致患者肌肉收縮力減退.嚴重則致肌肉萎縮。而骨折恢復(fù)期及其他肌力受損患者,手部承重吃力,臂部肌肉難以較正常人進行可運作范圍內(nèi)的屈伸、回旋等動作,需對其進行外加施力助力,引導(dǎo)其患臂運動,恢復(fù)肌力,提高患者自身的康復(fù)效率,預(yù)防或減輕手臂局部的肌肉萎縮。
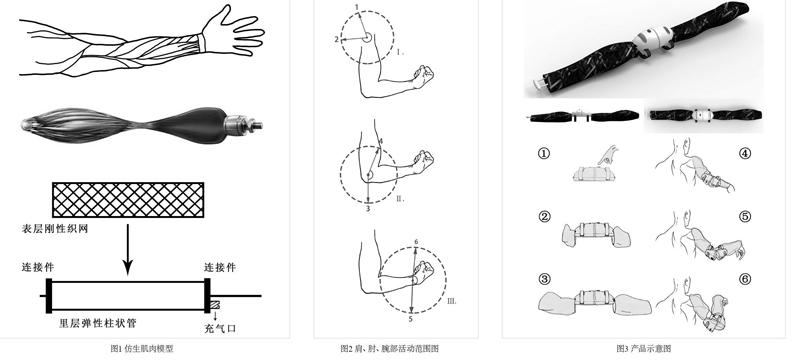
(二)仿生肌肉模型:(如圖1)所示,仿生肌肉是一種模仿人體肌肉的機械元件,最早的仿生肌肉模型是由物理學家Joseph L720世紀50年代提出,用于殘疾人的肢體矯正。Joseph L所提出的McKlbben型氣動肌肉,由織網(wǎng)結(jié)構(gòu)與柱狀結(jié)構(gòu)兩部分組成。織網(wǎng)結(jié)構(gòu)包裹在柱狀結(jié)構(gòu)外部,模擬人體的肌腱、肌肉纖維結(jié)構(gòu)。
人體肌肉纖維有靜止、收縮、舒張三種運動狀態(tài),處于靜止狀態(tài)時,肌肉纖維呈間隙常態(tài),處于收縮狀態(tài)時,肌肉纖維間隙縮小,處于舒張狀態(tài)時,肌肉纖維間隙增大,以適應(yīng)骨骼運動的變化趨勢。
仿生肌肉的驅(qū)動方式模擬人體肌肉纖維的伸縮方式,仿生肌肉模型柱狀結(jié)構(gòu)可以隨充放氣進行體積收縮變化,從而帶動助力器的組織結(jié)構(gòu),產(chǎn)生助力作用,且質(zhì)量輕便、響應(yīng)迅速、成本低廉。本研究所設(shè)計的上肢助力產(chǎn)品參考仿生肌肉結(jié)構(gòu)模型,貼合人體肌肉生理的伸縮、舒張?zhí)匦裕軌蛱岣邫C構(gòu)的柔順性、減輕機構(gòu)質(zhì)量。
三、柔性氣動上肢助力產(chǎn)品設(shè)計實踐
目的在于設(shè)計一種上肢助力產(chǎn)品,運用人體工程學,結(jié)合仿生肌肉結(jié)構(gòu)原理,簡化產(chǎn)品功能,培養(yǎng)患者的自主訓練意識,提高患者肌力的恢復(fù)效率,滿足用戶的心理需求,提升用戶體驗感。
(一)產(chǎn)品功能原理:柔性氣動上肢助力產(chǎn)品的仿生肌肉原理,采用空間彎曲柔性纖維,在維持產(chǎn)品助力所需剛性固定結(jié)構(gòu)的同時,具備良好的收縮舒張?zhí)匦浴鈩臃律嵝越Y(jié)構(gòu),采用氣動肌肉驅(qū)動控制,利用氣壓傳動固有的柔陸特性實現(xiàn)結(jié)構(gòu)的仿生柔性。
本設(shè)計中采用的仿生肌肉結(jié)構(gòu),采用彈性氣囊結(jié)構(gòu)與網(wǎng)狀纖維材料組成。彈性氣囊結(jié)構(gòu)柔順性、輕便性較強,網(wǎng)狀纖維結(jié)構(gòu)能夠保持產(chǎn)品的剛性特性,可對患者患臂起到良好的支撐與保護作用,可助力患肢做屈伸運動,避免二次傷害。
(二)產(chǎn)品功能設(shè)計:本研究設(shè)計的上肢助力產(chǎn)品,包含被動訓練與主動訓練兩種訓練模式。被動訓練適用于骨折恢復(fù)期與肌力受損患者,產(chǎn)品模式根據(jù)患者患臂情況定制模式難易進度,從簡單到復(fù)雜,助力逐漸疢復(fù)患者患臂肌力;主動訓練適用于骨折康復(fù)期與肌力受損患者,根據(jù)患者主觀意識選擇訓練模式,對患肢進行走制訓練,培養(yǎng)患者的自主恢復(fù)意識。
上肢助力產(chǎn)品包含雙臂訓練,平衡與協(xié)調(diào)患者雙臂的康復(fù)狀況,使患者能夠及時比對左右手臂恢復(fù)情況,推進患者康復(fù)進度。
(三)人機工程學原理:(如圖2)所示,人體肩、肘、腕部活動范圍不同。在垂直方向,肩、腕部可做回旋、屈伸動作,肘部可做屈伸動作,在水平方向,肩、肘、腕部可做舒張動作。而骨折、肌力受損的患者,在臂力恢復(fù)期間,可佩戴帶上肢助力設(shè)備,對肩、肘、腕部恢復(fù)過程進行干涉,上肢的運動狀況可由僵直逐漸恢復(fù)到正常狀態(tài),上肢助力產(chǎn)品的關(guān)節(jié)活動范圍均可通過編程等方式進行預(yù)設(shè)。
(四)產(chǎn)品設(shè)計方案:本研究采用仿生設(shè)計中結(jié)構(gòu)仿生與功能仿生的設(shè)計方法,探究了肌肉的纖維組織結(jié)構(gòu),參考氣動肌肉的結(jié)構(gòu)原理,模擬設(shè)計充氣氣囊式纖維結(jié)構(gòu)。該結(jié)構(gòu)具備仿生肌肉的收縮、舒張性能,能夠完整包裹患臂,分段助力。
根據(jù)上述人體上肢肌肉受力分析及人體測量肩、肘、腕部運動范圍分析,上肢助力機器人設(shè)計點重點分為兩部分:第一,根據(jù)肩肘腕部運動軌跡,設(shè)計助力器的施力大小、可運動方向及造型;第二,根據(jù)腕、肘、肩部運動范圍與患臂各恢復(fù)階段的運動需求,設(shè)走助力產(chǎn)品的不同訓練模式。
本設(shè)計的產(chǎn)品所屬類別為醫(yī)療設(shè)備,除去氣囊結(jié)構(gòu)的特定灰色組織色彩之外,仍需滿足醫(yī)療設(shè)備的白色、藍色等器械色彩需求。考慮到產(chǎn)品的情感化、人性化設(shè)計原則,將其設(shè)定為氣囊彈取結(jié)構(gòu),操作簡便、功能簡易,增強產(chǎn)品的趣味性與輕便性,減弱醫(yī)療設(shè)備的繁重感,從而減輕用戶在產(chǎn)品佩戴過程中的心理壓力。
產(chǎn)品效果圖及使用過程圖(如圖3)所示,按壓設(shè)備表面開關(guān)按鈕,設(shè)備左右兩側(cè)彈出纖維氣囊結(jié)構(gòu),氣囊舒張完畢后,用戶可對結(jié)構(gòu)從左向右進行套取穿戴,隨后將設(shè)備表面束帶結(jié)構(gòu)包裹患肢上臂與大臂,用于設(shè)備的結(jié)構(gòu)固定。用戶在佩戴運動過程中,設(shè)備可根據(jù)用戶自身的施力大小啟動助力模式,同時,產(chǎn)品能夠?qū)τ脩羧梭w信號進行肌電信號采集,生成運動、力量、肌肉活動、心率等相關(guān)訓練數(shù)據(jù),以滿足患者的特定需求。
結(jié)論
仿生設(shè)計、柔性氣動結(jié)構(gòu)在助力設(shè)備中應(yīng)用為本研究的上肢助力產(chǎn)品提供了諸多參考。柔性氣動結(jié)構(gòu)能夠滿足用戶對助力產(chǎn)品的柔性需求與結(jié)構(gòu)的剛性依托。后續(xù)研究將繼續(xù)深入探索產(chǎn)品設(shè)計過程中的人機友好性、功能具體實施方式、對比所用材料的柔性特征與所依托的肌電信號采集技術(shù),以為柔性氣動上肢助力產(chǎn)品設(shè)計提供理論支持。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
哲學評論(2021年2期)2021-08-22 01:53:34
金橋(2020年9期)2020-10-27 01:59:44
中學生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
中華詩詞(2019年7期)2019-11-25 01:43:04
商周刊(2017年17期)2017-09-08 13:08:58
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
Coco薇(2015年1期)2015-08-13 02:23:50
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
玩具(2009年10期)2009-11-04 02:33:14
