基于實時SSR數據的LEO衛星精密單點定位研究
2019-05-23 08:45:06
中國空間科學技術 2019年2期
1. 南京航空航天大學 微小衛星中心,南京 210016 2. 上海衛星工程研究所,上海 201109
低軌衛星自身定位通常會使用GPS,因此GPS衛星的軌道誤差和鐘差模型偏差是影響精密單點定位精度的主要因素。通常衛星軌道參數和鐘模型由GPS衛星廣播的導航電文給出,由星歷誤差與模型誤差導致的測碼偽距的測量誤差能夠達到4.2 m,同時鐘差影響能夠達到3.0 m[1-3]。如要在低軌實現亞米級的高精度定位,GPS單使用廣播星歷將無法達到預期精度。對于地面定位,為了解決這個問題,國際GNSS服務組織(IGS)利用分布在全球的260多個跟蹤站,長時間觀測GPS衛星的軌道數據進行分析和總結,進而得到精密星歷產品,使得衛星軌道誤差能夠達到厘米級。為了取得到高精度的定位結果,通常會使用IGS組織的事后精密星歷產品,該產品中衛星軌道誤差能夠達到約2.5 cm,衛星鐘差達到約75 ps[4]。然而事后精密星歷產品,每周更新,即在事后一周左右才能獲取。然而對于低軌衛星而言,要實現實時高精度定位,只能采用預報精密星歷,預報精密星歷的衛星軌道誤差能夠達到約5 cm,衛星鐘差精度較差達到約5 ns[5-6],如果把預報精密星歷實時提供給低軌衛星,這樣就能夠大幅度提高定位精度。然而,目前低軌衛星能夠實時獲取的是廣播星歷,預報精密星歷要通過地面測控站上注獲取,怎樣在有限的條件下,盡可能降低衛星軌道誤差和鐘差,這是本文研究的重點。
IGS組織為了滿足用戶的需求,于2001年建立了IGS實時工作組(the IGS Real-Time Working Group,RTWG),專注于實時高精度定位的研究。實時定位服務(Real-Time Service,RTS)的框架在2011年定義,并且IGS組織從2013年開始正式提供[7]。IGS RTS是基于Internet以NTRIP協議(Network Transport of RTCM over the Internet Protocol)按RTCM-SSR(State Space Represention)格式播發的實時數據流,提供基于廣播星歷的精密衛星軌道和鐘差改正數,能夠在全球范圍內實現精密單點定位(Precise Point Positioning,PPP)及其相關應用,如時間同步和災害監測。RTS是基于網絡的IGS全球基礎設施、數據中心、分析中心,提供世界標準的高精度GNSS數據產品[8]。
現有很多事后驗證的低軌衛星的高精度定位算法,采用國外低軌衛星的數據進行分析和驗證,比如利用美國和德國共同研制的GRACE地球重力衛星的軌道數據來驗證PPP定軌結果[9]。鑒于目前高精度定位星歷上使用的單一,同時為了低軌衛星能夠實現實時高精度的精密單點定位,結合低軌衛星自身特性,本文提出結合使用廣播星歷,IGS組織提供的預報精密星歷和SSR實時數據流,應用于非差精密單點定位算法中,來實現高精度定位。
1 星載精密單點定位基本原理
精密單點定位算法是利用雙頻接收機的偽距和載波相位觀測數據,結合精密的衛星軌道產品和衛星鐘差產品,同時對影響定位的各種誤差進行修正或者估計,利用載波相位的短波長特性,估計載波相位的模糊度,從而獨立精確地確定該臺接收機位置的方法[10-11]。
在常使用的精密單點定位算法中,觀測值中的電離層延遲誤差通過雙頻信號組合消除,對流層延遲誤差通過引入位置參數進行估計[12-13]。其中以米為單位的偽距和載波相位觀測方程可以表示為:



非差精密單點定位算法主要過程包括:觀測數據的預處理和精密星歷處理(要求衛星軌道精度達到厘米級水平,衛星鐘差改正精度達到亞納米級水平)、各項誤差的模型改正及參數估計、模糊度固定。整個算法流程如圖1所示。
其中對于精密星歷的處理,對于低軌衛星而言,需要考慮到星歷的選取,一般而言會直接采用星載GPS接收機接收到的廣播星歷,考慮到廣播星歷的精度有限,本文提出把事先下載好預報精密星歷和SSR實時改正信息上注到低軌衛星上,以提高GPS衛星軌道數據的精度。
2 實時精密軌道和衛星鐘差產品
2.1 實時SSR改正信息產品的獲取和說明
實時SSR改正信息產品由IGS組織實時發布,用戶可以由客戶軟件通過Internet訪問該列表,并選取合適的掛載點,從NTRIP數據源獲得改正數據。其中SSR改正信息主要有4種產品:IGS01、IGC01、IGS02和IGS03[14]。
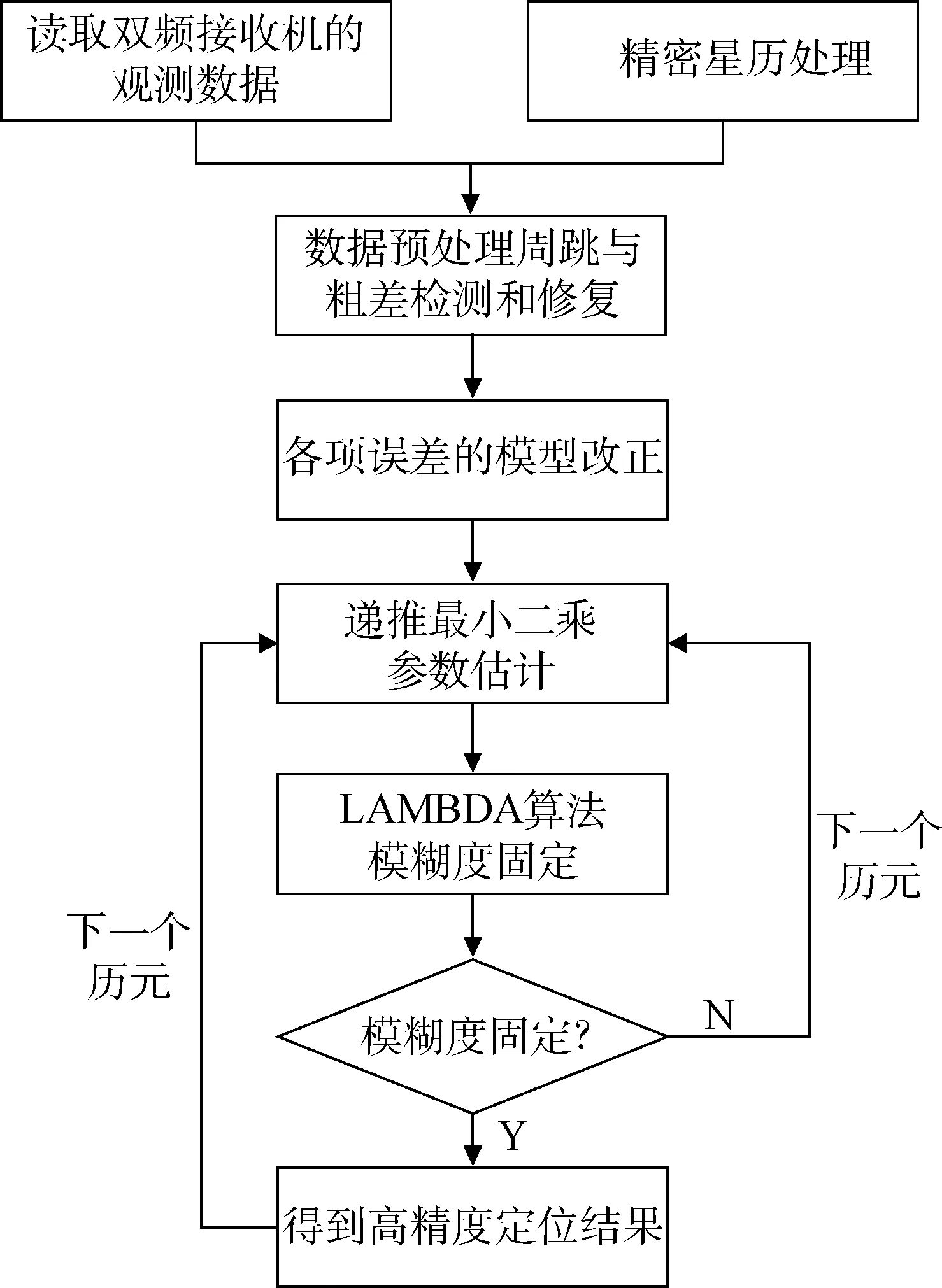
圖1 精密單點定位算法流程Fig.1 Flow chart of precision point positioning algorithm
這4種產品的主要技術參數如表1所示。表1中APC表示天線相位中心,CoM表示質心,其中RTCM信息用數字編號,括號中的數字代表獲取的時間間隔(單位s)。
本文所采用的是IGS03產品,利用BKG的BNC軟件產生的卡爾曼濾波器處理GPS+GNSS組合觀測值。利用卡爾曼濾波器處理數據,需要一段時間達到收斂后才能得到準確的結果。一旦收斂,除非軟件重啟,否則一直能夠保持準確性,并且發布的產品不會是收斂期的數據[15-17]。在IGS03產品中的軌道信息是從超快星歷產品中提取出來的。該產品不僅包括GPS修正外還包括GLONASS的修正。采用IGS03產品主要考慮到該產品內還包括GLONASS相關修正數據,以便于日后GPS+GLONASS組合導航的研究。
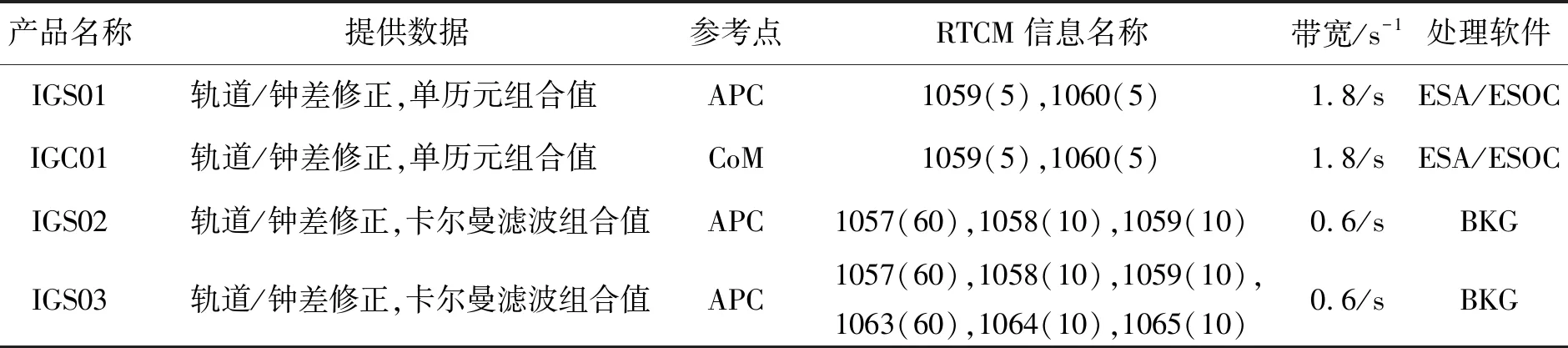
表1 產品技術參數
本文中采用了IGS03產品中的1057和1058數據,即GPS衛星的軌道和鐘差修正數據。
2.2 實時SSR改正信息使用
對于SSR修正信息主要使用1057(GPS廣播星歷的軌道修正)和1058(GPS廣播星歷的鐘差修正)數據。其中1057軌道修正如圖2所示。

圖2 軌道修正示意Fig.2 The diagram of track revision
軌道修正主要是對衛星天線相位中心δO進行修正,主要提供衛星運行軌道運行切向、徑向和法向的修正。在實際計算過程中,需要轉化為衛星位置方向的修正δX,再把通過廣播星歷計算得到的位置信息減去修正,最終得到修正后的位置信息[16]:
Xorbit=Xbroadcast-δX(1)
式中:Xorbit為經過SSR軌道修正后的衛星位置;Xbroadcast為通過廣播星歷計算得到的衛星位置。
衛星位置的修正δX計算過程如下:
(2)
eradial=ealong×ecross(4)


衛星軌道修正最重要的要保證統一的參考坐標系。全球服務組織通常采用ITRS坐標協議。
1058廣播星歷鐘差修正即把GPS衛星鐘差修正,也就是結合廣播星歷計算得到的衛星鐘差再加以修正[17]:
(6)
式中:tbroadcast為根據廣播星歷得到的衛星鐘差;tsatellite為修正后的衛星鐘差;c為光速。
鐘差修正值δC由下式得到:
δC=C0+C1(t-t0)+C2(t-t0)2(7)
式中:t為當前時刻;t0為從SSR鐘差修正數據中得到的參考時間;Ci為從SSR鐘差修正數據得到的多項式參數,i=0,1,2。
衛星鐘差由服務提供商通過去電離層組合觀測值得到。去電離層組合觀測值會受到衛星硬件延遲(碼偏)影響。針對這個問題,由服務提供商選擇產生衛星鐘差修正的信號并且處理信號的碼偏問題,確保時鐘和碼偏參數的一致性,并且所有參考移動站都保持一致的碼偏和時鐘修正[18-20]。
3 低軌衛星上衛星星歷的使用
本文提出一種應用于低軌衛星在軌實時定位的精密單點定位的算法,精密單點定位最主要的是對各種誤差的修正和消除,其中主要誤差來源就有GPS衛星星歷的軌道誤差和鐘差。因此嘗試在衛星過境的時候把GPS高精度的星歷上注,并同時上注SSR實時修正數據流,以降低由于衛星軌道誤差造成的定位精度偏差。
低軌導航增強衛星運行速度很快,每次過境時間只有十幾分鐘,且受到外界環境因素和星上處理器的處理能力約束,不能獲得完整的預報精密星歷和SSR實時數據流,只能把當天24 h的星歷和當前的SSR實時數據上注到過境低軌衛星上。所以在PPP算法實際應用上就需要對現有星歷數據進行處理和選擇。
對星歷處理的整個流程如圖3所示。首先,在星歷選取上,根據當前時刻存儲器存儲的數據,如果同時存在預報精密星歷和廣播星歷,優先選取預報精密星歷數據組。其次,若存在SSR實時數據流,結合當前廣播星歷,修正廣播星歷的軌道數據和鐘差,將得到的修正后的軌道數據和鐘差數據根據時間順序插入預報精密星歷數據組中。最后,在預報精密星歷數據組中使用拉格朗日插值法得到當前時刻的衛星軌道數據和鐘差數據。如果當前時刻沒有相應的預報精密星歷,就使用廣播星歷,再依據當前時刻計算得到相應的軌道數據和鐘差數據,若存在SSR實時數據流,且在可修正的時間范圍內,加入SSR修正得到軌道數據和鐘差數據。
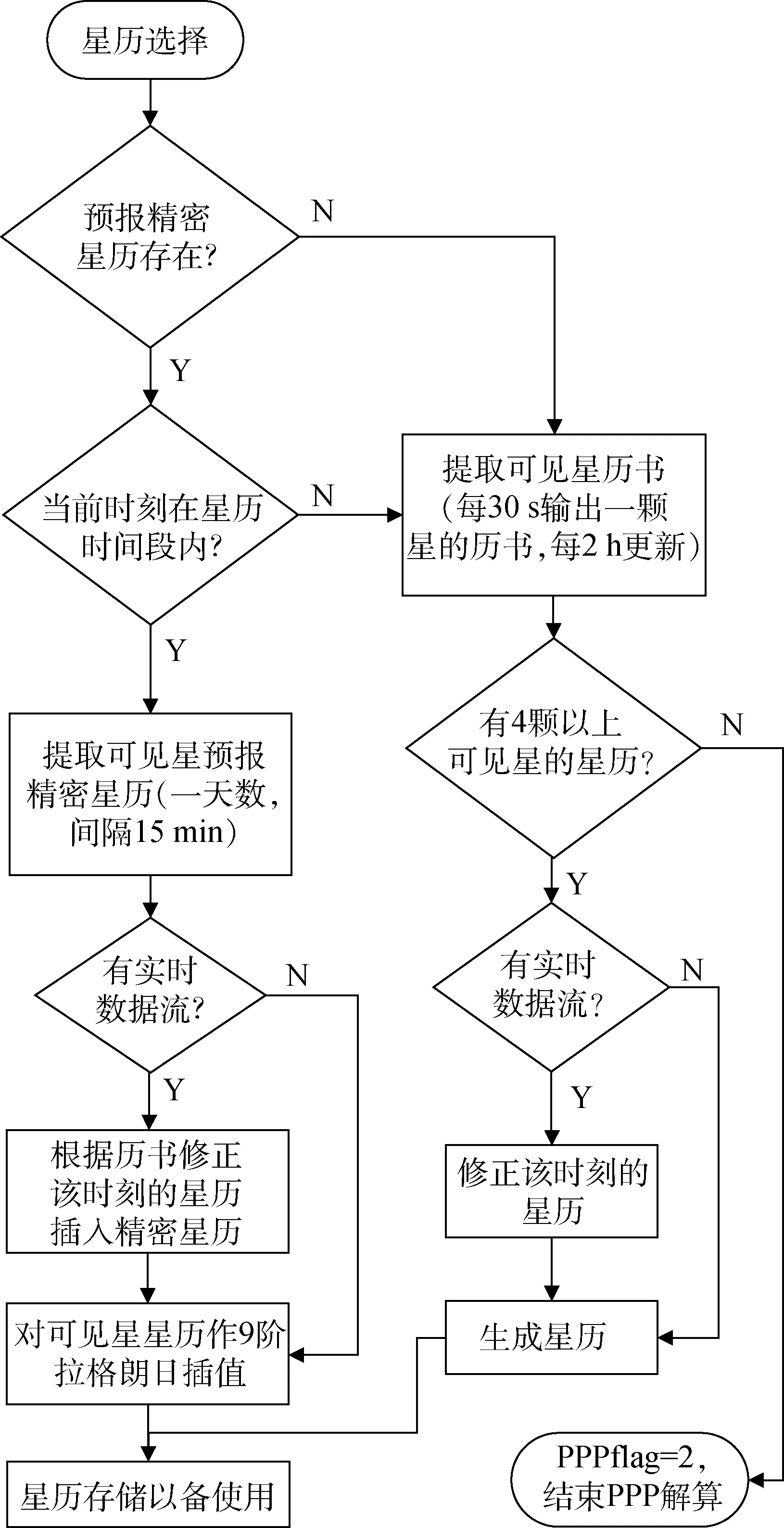
圖3 衛星星歷使用流程Fig.3 The flow chart of satellite ephemeris
考慮星上處理器的處理能力和某些不可預測的問題,對非差精密單點定位算法增加了幾點優化:首先,確保在開始精密單點定位算法的時候,至少有4組健康的衛星星歷,即可見星至少有4顆,且接收到的數據都是可靠的,這通常可以根據接收機接收到的信號中相應標志位判斷得到;其次,星歷選擇上,先要判斷低軌衛星接收到的精密星歷是否完整或是否是最新的精密星歷,防止低軌衛星沒有及時更新覆蓋舊的星歷,或者在上注出現丟包等問題;最后,SSR數據流在使用的時候不可避免會有延遲,但是在精密星歷使用時,精密星歷數據每隔15 min一組數據,當前時刻的軌道數據是用拉格朗日插值得到的,可以把用SSR修正過的廣播星歷作為一個時刻的軌道數據加入待插值的精密星歷中,以供插值使用。
4 仿真與分析
2017年7月11日在IGS網站上下載當天的預報精密星歷、事后精密星歷、SSR衛星修正數據和廣播星歷。廣播星歷采用的是SHAO站(上海佘山站)2017年7月11日全天的數據。對這幾種星歷得到的衛星軌道數據精度進行了對比。其中以事后精密星歷為參考。
GPS軌道精度如圖4~圖6所示,得到所有衛星互差的平均值(由于沒有PRN4衛星,因此計算時不考慮)如表2~表4所示。
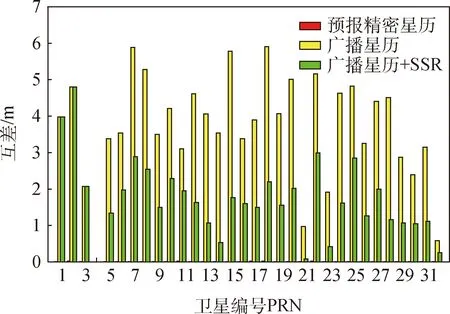
圖4 X軸GPS軌道精度Fig.4 The precision of X axis GPS orbit
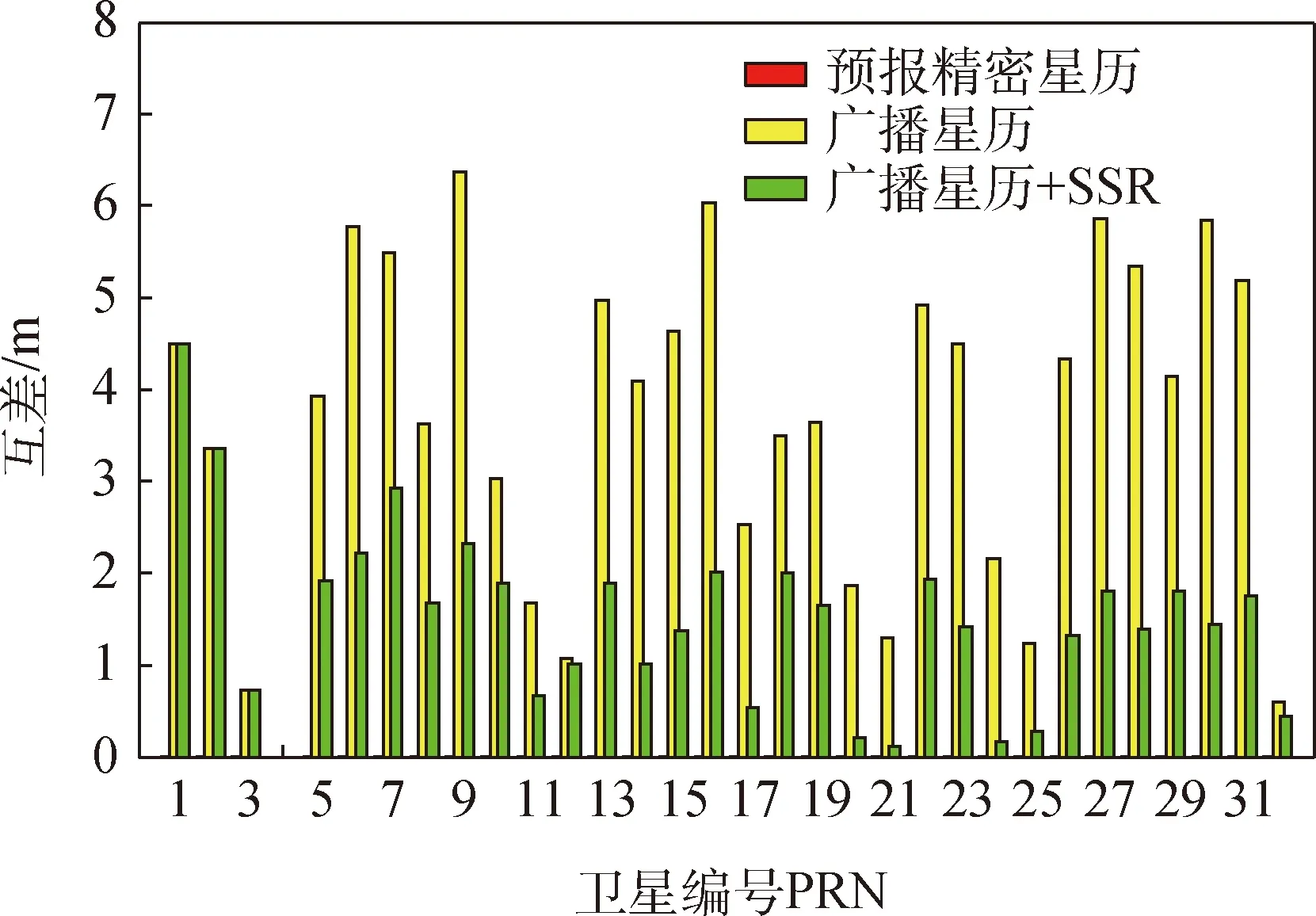
圖5 Y軸GPS軌道精度Fig.5 The precision of Y axis GPS orbit
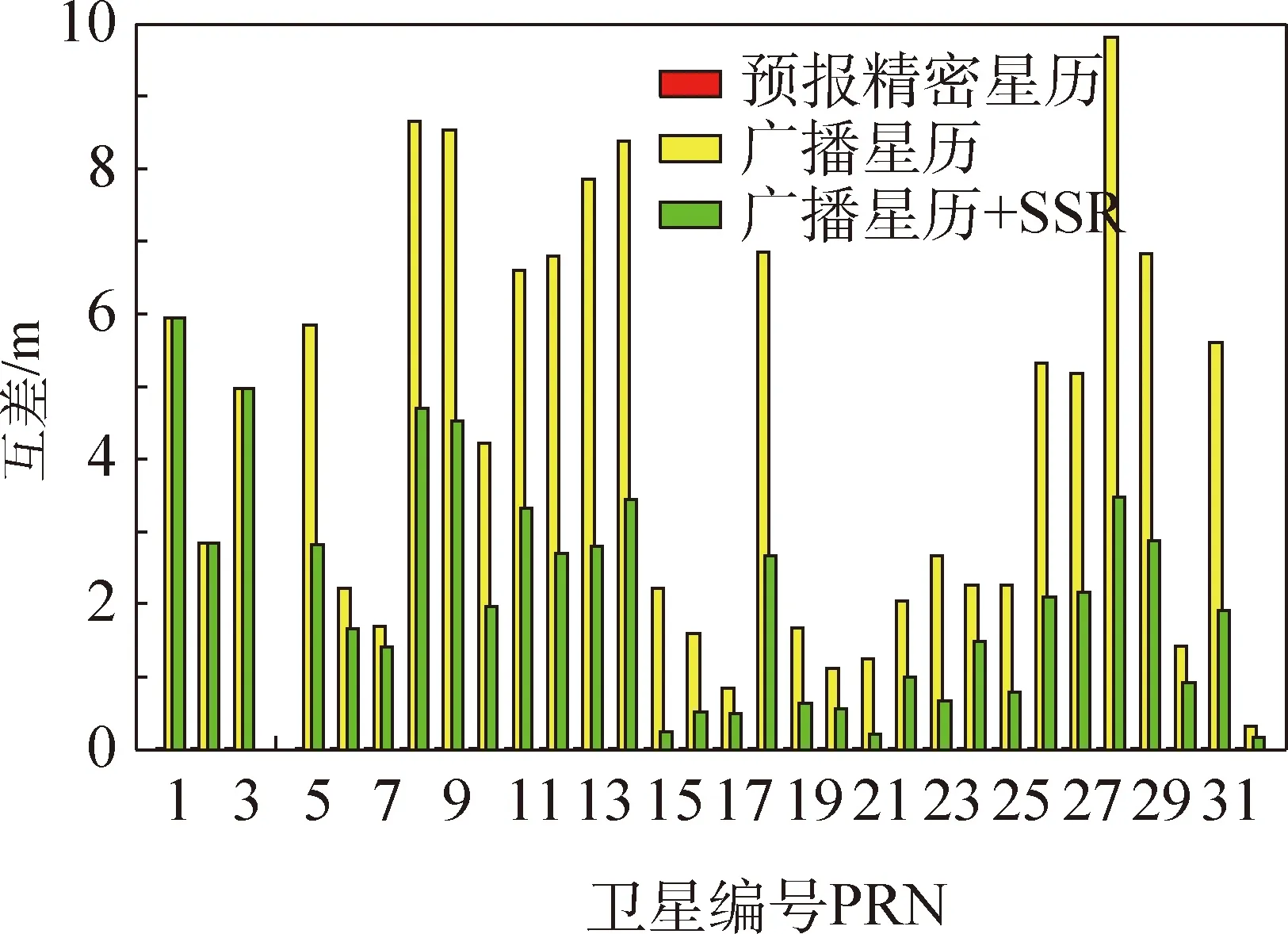
圖6 Z軸GPS軌道精度Fig.6 The precision of Z axis GPS orbit

表3 廣播星歷精度

表4 廣播星歷+SSR精度
可以發現,廣播星歷的衛星軌道誤差在米級,使用SSR軌道修正后精度提高了近1倍。預報精密星歷精度遠高于前兩者。
采用不同星歷,如廣播星歷,廣播星歷+SSR修正信息和預報精密星歷,來實現精密單點定位,在標定點[32.03730117393305°,118.813894937238°,10.264269456066950 m](經緯度和高度)進行采樣。進行驗證的數據采集于2017年3月15日12-17時,接收機天線固定在屋頂,四周開闊,無遮擋,接收信號環境良好。試驗結果如圖7所示,使用預報精密星歷,得到的定位精度統計分析為X軸0.20 m,Y軸0.37 m,Z軸0.16 m。
圖8顯示的是使用廣播星歷+SSR修正信息,得到的定位精度統計分析,X軸1.12 m,Y軸1.79 m,Z軸2.00 m。
如果單純采用廣播星歷定位,即接收機自身的定位,其定位精度在2~3 m,如圖9所示。總體而言,采用預報精密星歷得到的精密單點定位精度最高,在沒有及時下載預報精密星歷時,采用實時SSR修正信息也能夠很大程度上提高定位精度。
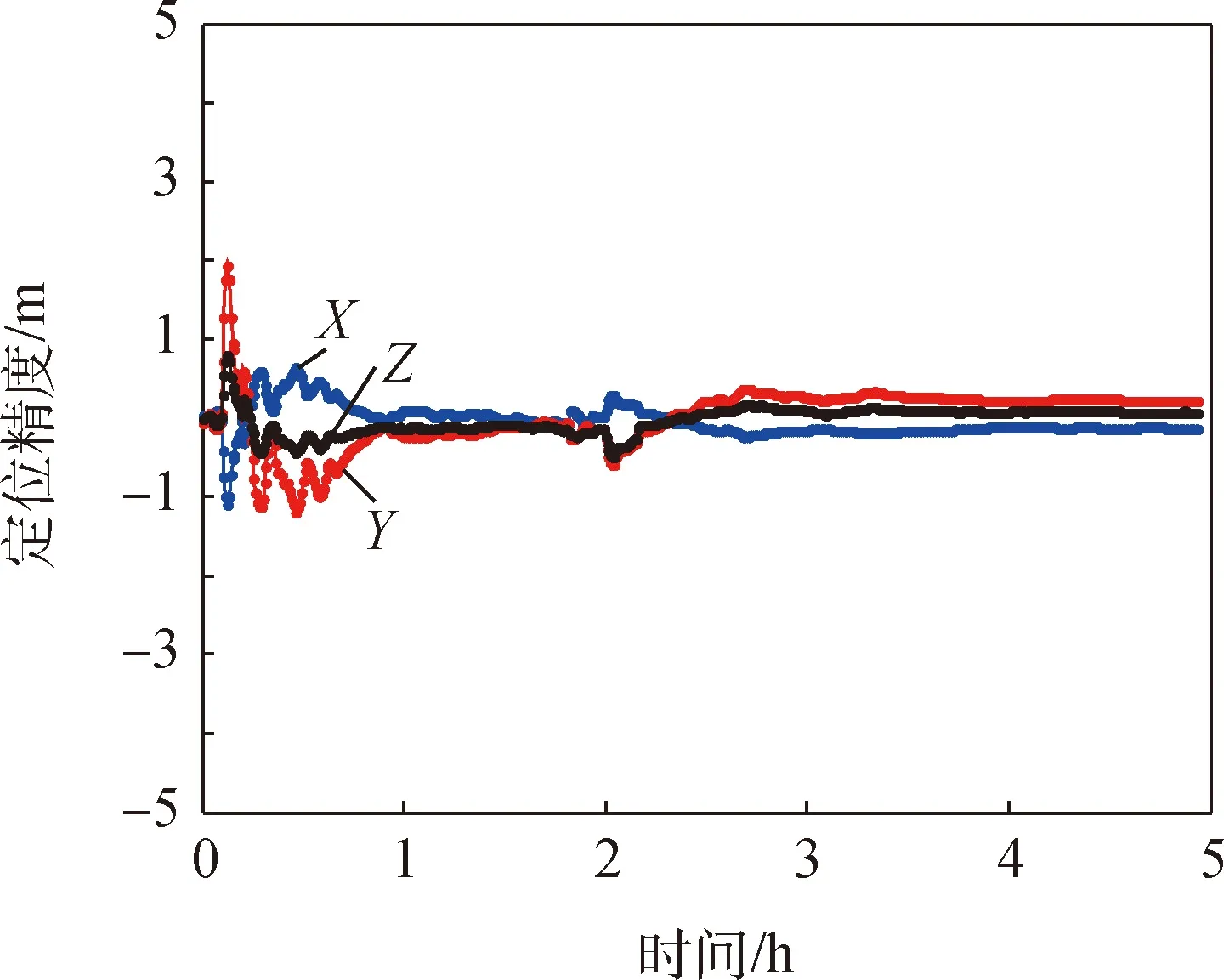
圖7 使用精密星歷定位精度Fig.7 The positioning accuracy using precision ephemeris
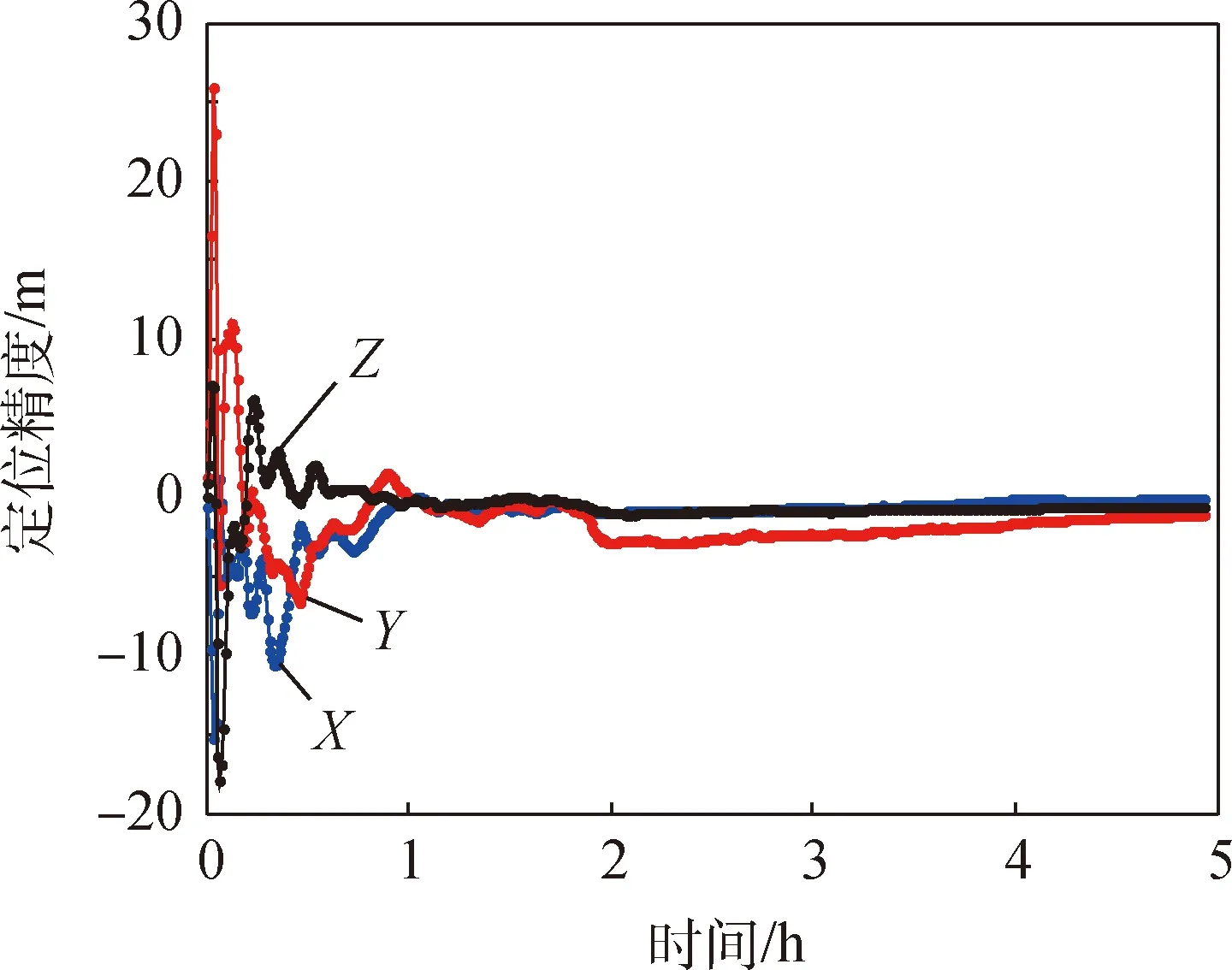
圖8 使用廣播星歷+SSR定位精度Fig.8 The positioning accuracy using the broadcast ephemeris +SSR
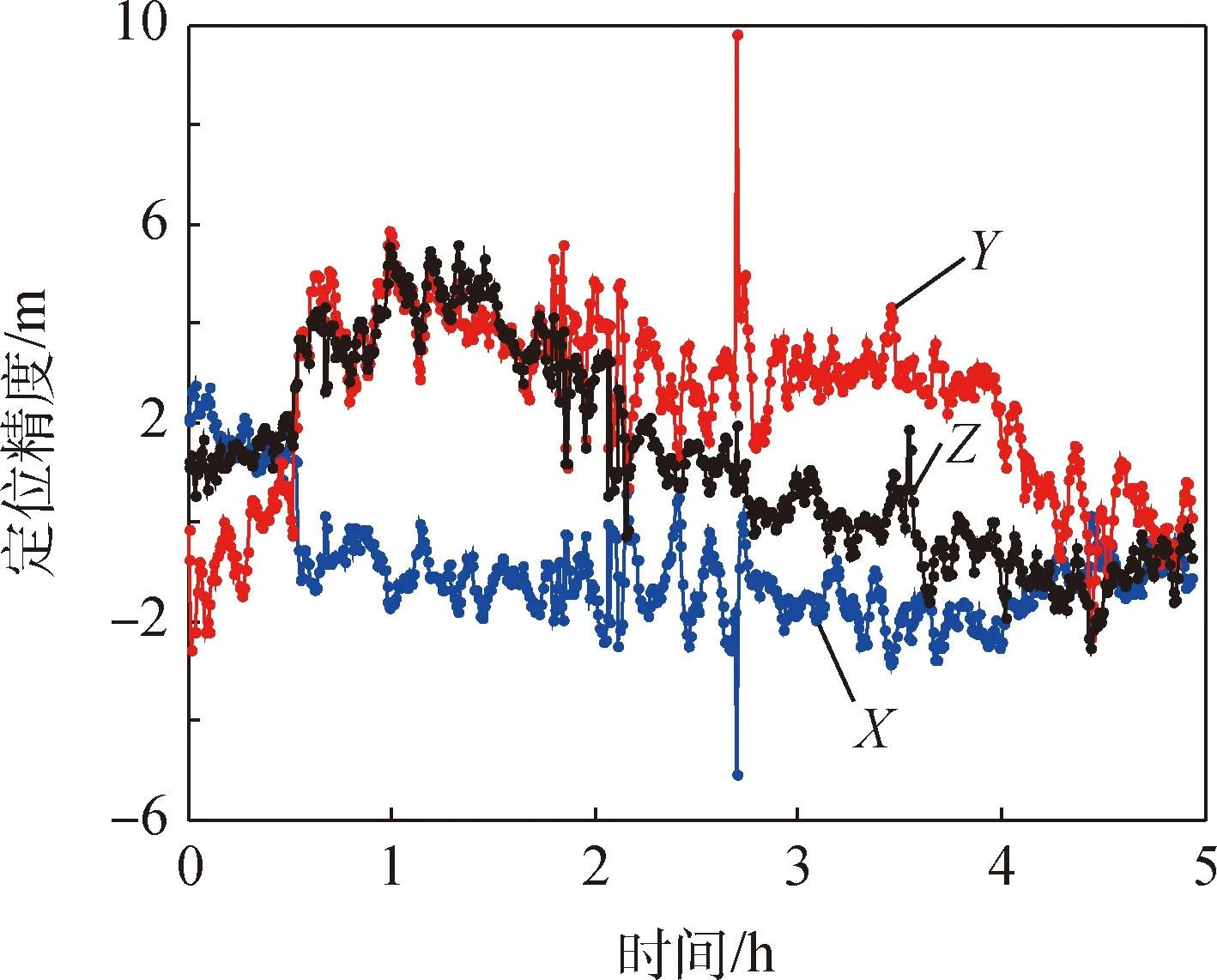
圖9 使用廣播星歷定位精度Fig.9 The positioning accuracy using broadcast ephemeris
5 結束語
對低軌衛星而言,能夠實時獲取的是廣播星歷,然而通過廣播星歷得到的GPS衛星軌道數據的精度遠達不到精密單點定位的精度要求。通過將一天的IGS精密星歷和SSR軌道修正信息注入到過境的低軌衛星,就可提高低軌衛星單點定位的精度。但在實際應用中,考慮到太空環境的復雜性,提出了廣播星歷、預報精密星歷和SSR修正信息相結合的使用方法,以適應和解決突發的情況,從而提高算法精度和魯棒性。該算法已經應用在導航增強載荷搭載在某型號低軌衛星上進行實際驗證,能夠在一定程度上提高低軌衛星的自身定位精度,同時地面觀測站利用低軌衛星轉發的高精度星歷,提高了自身定位精度。對于該算法還需要深入研究的是,實際太空低軌道的復雜環境對定位精度的影響、低軌衛星和地面的實時通信機制。