水田自走式噴霧機噴桿自動調(diào)平系統(tǒng)設計與試驗
2019-05-27 08:47:28可欣榮唐靈茂蒙世博
農(nóng)機化研究 2019年10期
張 盟,胡 煉,可欣榮,唐靈茂,蒙世博,杜 攀,周 浩,賀 靜
(華南農(nóng)業(yè)大學 a.南方農(nóng)業(yè)機械與裝備關鍵技術教育部重點實驗室;b.工程學院,廣州 510642)
0 引言
水稻是我國重要的糧食作物之一[1],稻谷總產(chǎn)量約占谷物總產(chǎn)量的36%。病蟲草害是影響水稻穩(wěn)產(chǎn)和高產(chǎn)的重要因素,由于化學農(nóng)藥具有高效、快速等特點,迄今為止,化學藥物防治仍是病蟲草害的最主要和最有效的防治手段[2-4]。近年來,水稻噴霧機械從傳統(tǒng)的背負式噴霧機快速發(fā)展到水田自走式噴霧機及航空植保機械,噴施作業(yè)效率及效果顯著[5]。由于水田的硬底層高低不一,噴霧作業(yè)時噴霧機與噴桿容易產(chǎn)生傾斜,導致噴桿難以保持水平狀態(tài),影響噴霧分布均勻性[6-7]。Speelman等[8]研究了噴桿在水平與垂直方向上的振動對噴霧量分布均勻性的影響,試驗結(jié)果表明,振動頻率對噴霧量分布均勻性有顯著影響;Ooms等[9]通過田間試驗研究表明,噴桿的水平運動是影響噴霧量橫向分布均勻性的主要因素;Sin.fort等[10]采用紅外發(fā)射器檢測噴桿的姿態(tài);Pochi等[11-12]設計了一套電位器式噴桿姿態(tài)檢測系統(tǒng);Ooms等[13]采用多傳感器的組合實現(xiàn)噴桿姿態(tài)檢測;王佳文等[14]利用彈簧和阻尼器完成噴桿機械調(diào)平工作;魏新華等[15]設計了一套基于超聲波傳感器的噴桿式噴霧機噴桿高度及平衡自動控制系統(tǒng),旱田試驗結(jié)果表明,在地面有起伏時,噴桿能夠快速恢復平衡。由于在水稻田中水面、泥面和冠層可認為近似水平,因此噴桿水平姿態(tài)控制可僅依靠噴霧機姿態(tài)角變化來決策。為實現(xiàn)噴桿自動調(diào)平控制,本文設計了噴霧機車身傾角傳感器和噴桿自動調(diào)平控制系統(tǒng),開展了測試試驗研究,并對試驗結(jié)果進行了分析。
1 噴桿自動調(diào)平機械結(jié)構設計
水田自走式噴霧機噴桿調(diào)平機械,包括高程調(diào)節(jié)結(jié)構、噴桿調(diào)平機構和噴桿3個部分,如圖1所示。高程調(diào)節(jié)機構包括平行四桿機構和電動推桿A,調(diào)節(jié)電動推桿A的伸長量即可調(diào)節(jié)噴桿高程;噴桿調(diào)平機構通過平行四桿機構與噴霧機連接,噴桿調(diào)平機構包括噴桿轉(zhuǎn)動架、電機安裝板、電動推桿B、位移傳感器安裝架及噴桿支架等;噴桿左右兩側(cè)的電動推桿用于控制噴桿的折疊;電動推桿B采用傾斜安裝的方式,當電動推桿B伸出其行程的1/2時,噴桿平行于噴桿轉(zhuǎn)動架。調(diào)節(jié)電動推桿B驅(qū)動噴桿繞轉(zhuǎn)動機構轉(zhuǎn)動,從而調(diào)節(jié)噴桿與噴霧機車身之間的相對角度,轉(zhuǎn)動機構與噴霧機之間的連接為剛性連接,拉線式位移傳感器用于檢測電動推桿B的伸長量。
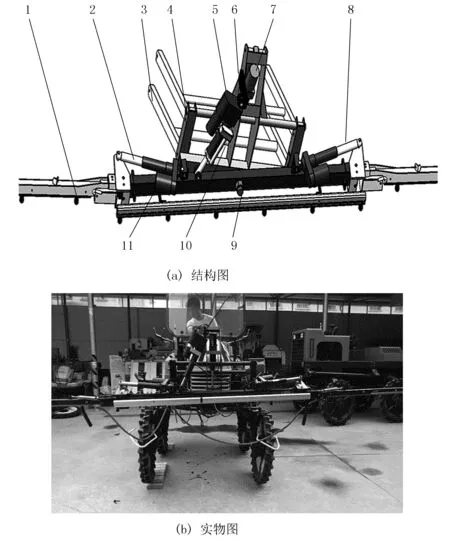
1.噴桿 2.電動推桿L 3.平行四桿 4.噴桿轉(zhuǎn)動架 5.電動推桿B
2 噴霧機車身傾角傳感器設計
2.1 測量原理
車身傾角傳感器主要由MEMS慣性傳感器[16-17]組成,包括陀螺儀(X軸、Z軸)和加速度計,如圖2所示。
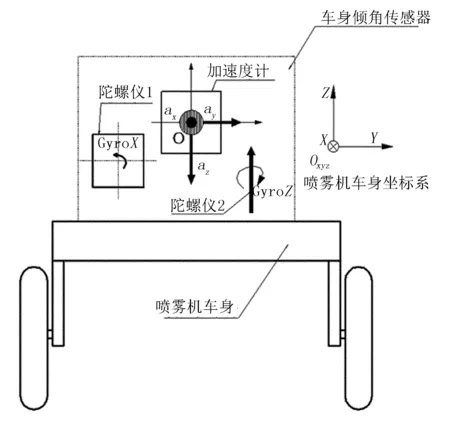
圖2 車身傾角傳感器安裝位置簡化圖
其功能分別為:陀螺儀1實時測量噴霧機橫滾軸的角速度;陀螺儀2實時測量噴霧機航向軸的角速度;加速度計實時測量噴霧機車身坐標軸上的加速度。在安裝車身傾角傳感器時,噴霧機車身坐標OXYZ與加速度計的坐標Oaxayaz重合,陀螺儀1和陀螺儀2的安裝軸分別與噴霧機車身坐標OXYZ坐標的X軸、Z軸重合。
2.2 電路總體方案設計
車身傾角傳感器的硬件主要包括三大部分,分別是數(shù)據(jù)采集部分、運算處理部分和數(shù)據(jù)通訊部分。運算部分處理器采用TI生產(chǎn)的C2000系列32位DSP處理器TMS320F28069,時鐘頻率90MHz,可進行32位帶浮點運算,外設資源豐富,具有SPI、I2C、ADC、RS232和CAN等數(shù)據(jù)采集和通訊功能,各項指標均能滿足使用要求。數(shù)據(jù)采集部分主要用于采集陀螺儀、加速度計和拉線傳感器數(shù)據(jù)。其中,X軸和Z軸陀螺儀分別選用美國ADI公司生產(chǎn)的ADXRS453和ADXRS810型陀螺儀(角速度傳感器);加速度計選用美國ADI公司生產(chǎn)的ADXL355型慣性測量模塊,可進行3軸MEMS加速度測量,單位可選,包括±2、±4、±8g;拉線傳感器選用選用臺州市椒江西域電子生產(chǎn)的型號為WXY15M-400-R型拉線式位移傳感器,測量行程400mm,分辨率理論無線小,拉線速度最大為600mm/s。處理器TMS320F28069通過SPI接口采集ADXRS453、ADXL355、ADXRS810數(shù)據(jù)后,對原始數(shù)據(jù)進行低通濾波處理卡爾曼濾波算法運算,計算得到噴霧機車身傾斜角度;拉線式位移傳感器經(jīng)由處理器內(nèi)置的A/D轉(zhuǎn)換器采集并轉(zhuǎn)化為數(shù)字信號,最后與傾角信號由CAN總線方式傳送至控制器。車身傾角傳感器框圖如圖3所示。
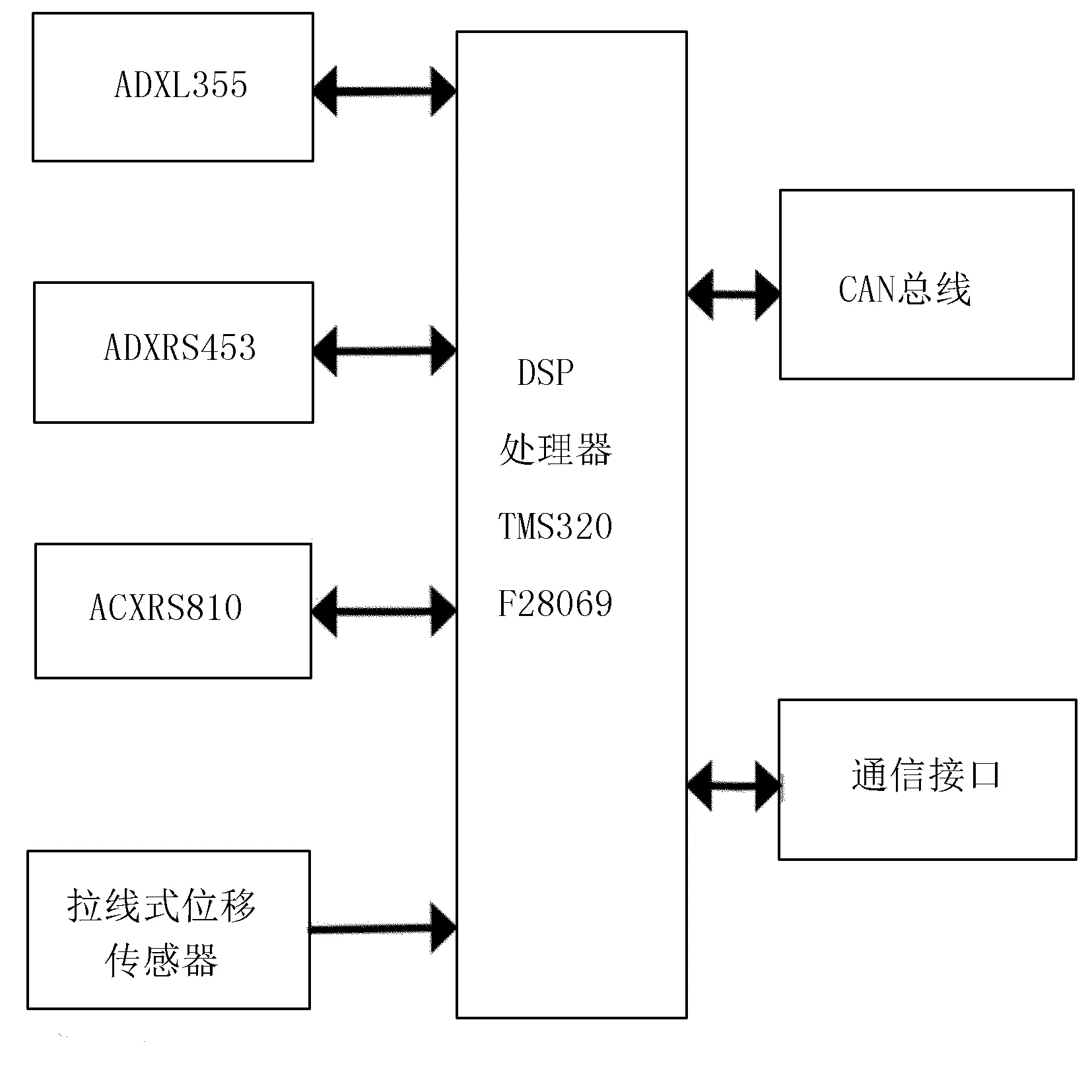
圖3 車身傾角傳感器總體設計圖
2.3 卡爾曼濾波器設計
卡爾曼濾波簡稱KF(Kalman Filtering),是一種遞推的線性最小方差估計濾波方法[18]。它是利用前一個時刻的估計值,加上實時觀測的量測值來進行實時估計,適用于平穩(wěn)過程和非平穩(wěn)過程。
噴霧機行駛過程中,卡爾曼濾波融合加速度計和陀螺儀的方法過程為
(1)
(2)
(3)
(4)
ZK=sin-1(ag,y,k/g)+wa,k
(5)
(6)

2.4 軟件設計
車身傾角傳感器軟件設計主要在CCS6.1.1(Code Composer Studio)集成編譯軟件中完成。其主要功能為:設備初始化、傳感器數(shù)據(jù)的采集與處理,以及卡爾曼濾波運算和通信等。設備初始化包括處理器外圍設備引腳設置和I/O口設置的初始化,主要包括時鐘定時器模塊初始化、SCI模塊初始化、ADC模塊初始化、eCAN模塊初始化及SPI模塊初始化。
車身傾角傳感器的運行流程如圖4所示。當處理器完成初始化之后,程序自動對MEMS傳感器進行檢測,傳感器檢測正常則開啟時鐘中斷,反之結(jié)束。定時器中斷服務中,依次進行MEMS傳感器數(shù)據(jù)采集、初步處理、卡爾曼濾波算法運算和數(shù)據(jù)發(fā)送。
3 噴桿自動調(diào)平控制系統(tǒng)
3.1 噴桿自動調(diào)平控制系統(tǒng)結(jié)構
噴桿自動調(diào)平控制系統(tǒng)如圖5所示。采用三軸加速度和兩個陀螺儀數(shù)據(jù),通過卡爾曼濾波算法得到噴霧機車身實時橫向傾角,利用拉線式位移傳感器實時測量調(diào)平電動推桿的伸長量,通過計算獲得噴桿相對于噴霧機車身的角度,經(jīng)由控制器運算并輸出控制信號,實現(xiàn)噴桿的自動調(diào)平控制。
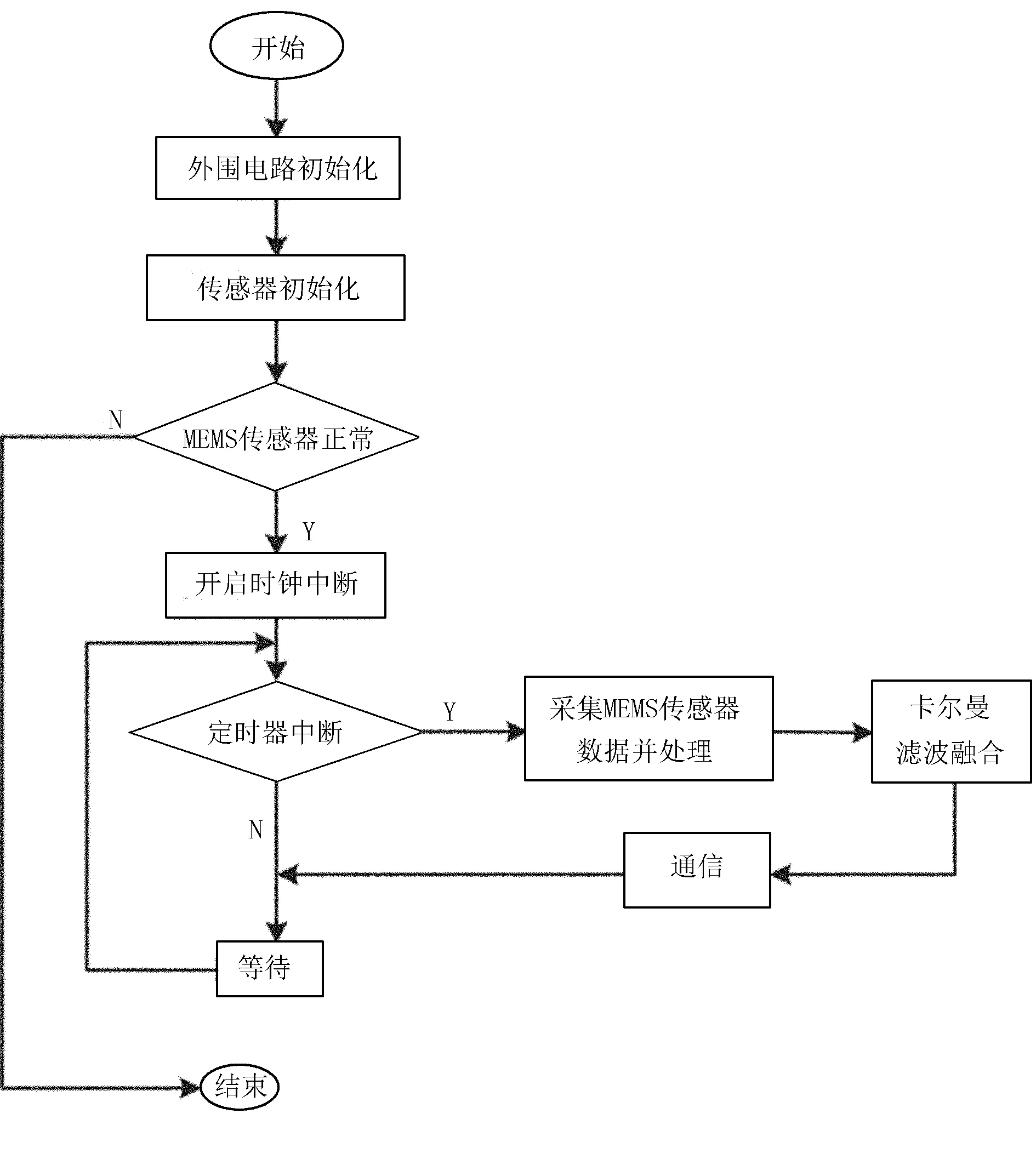
圖4 傾角傳感器系統(tǒng)流程圖
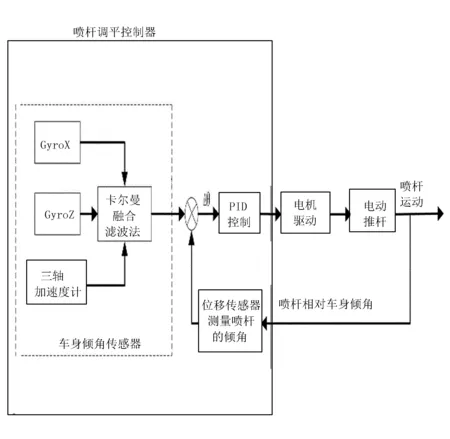
圖5 噴桿自動調(diào)平控制系統(tǒng)簡化結(jié)構圖
噴桿與噴霧機相對運動可簡化如圖6所示。其中,噴桿與轉(zhuǎn)動鉸接點的位置與噴桿的坐標中心Oh重合,噴霧機的前進方向與XtOtYtZt坐標系Xt正方向平行。噴桿相對于噴霧機的傾斜角θ與電動推桿的伸長量α的關系為
(7)
其中,α和β分別為噴桿鉸接處的兩個固定角度(°);Lb和Lc分別為電動推桿兩端與噴桿轉(zhuǎn)動機構鉸接點之間的距離(mm);La為電動推桿伸縮至最短時的長度(mm);a為電動推桿的伸長量(mm)。
噴桿調(diào)平控制采用增量式PID控制算法[19-20],當前時刻應控制的噴桿目標角度和噴桿相對噴霧機車身傾角調(diào)節(jié)量分別為控制量和增量。

圖6 噴桿自動調(diào)平系統(tǒng)簡化結(jié)構圖
圖6中,Oh為噴桿坐標中心且是噴桿與轉(zhuǎn)動機構的鉸接點;Ot為噴霧機車身坐標中心;yt為噴霧機車身坐標系y軸;zt為噴霧機車身坐標系z軸;ca為電動推桿頂端與噴霧機車身的鉸接點;cb為電動推桿底端與噴桿的鉸接點;cc為cb在噴桿上的投影點;θ為噴桿相對于噴霧機車身的傾斜角度,(°);α為夾角cbOhcc,(°);β為夾角caOhOt(°);La為電動推桿的最短長度(mm);a為電動推桿的位移伸長量(mm);Lb為caOh的長度(mm);Lc為cbOh的長度(mm)。
3.2 噴桿自動調(diào)平控制系統(tǒng)程序流程
田間作業(yè)過程中,車身傾角傳感器安裝在噴霧機車身上并實時檢測噴霧機的傾斜角度,拉線式位移傳感器安裝在電動推桿上并實時測量電動推桿的伸縮量,結(jié)合噴霧機與噴桿的幾何關系求得相對角度,實現(xiàn)噴桿自動調(diào)節(jié)的自動閉環(huán)控制。工作流程圖如圖7所示。
噴桿自動調(diào)平控制系統(tǒng)子程序流程如下:
1)系統(tǒng)初始化;
2)測量噴霧機車身傾斜角度以及噴桿相對于車身的相對角度;
3)判斷是否對噴桿進行水平控制;
4)當需要對噴桿進行水平控制時,輸出驅(qū)動信號調(diào)節(jié)噴桿傾斜角度;反之,則返回重新測量角度信息。
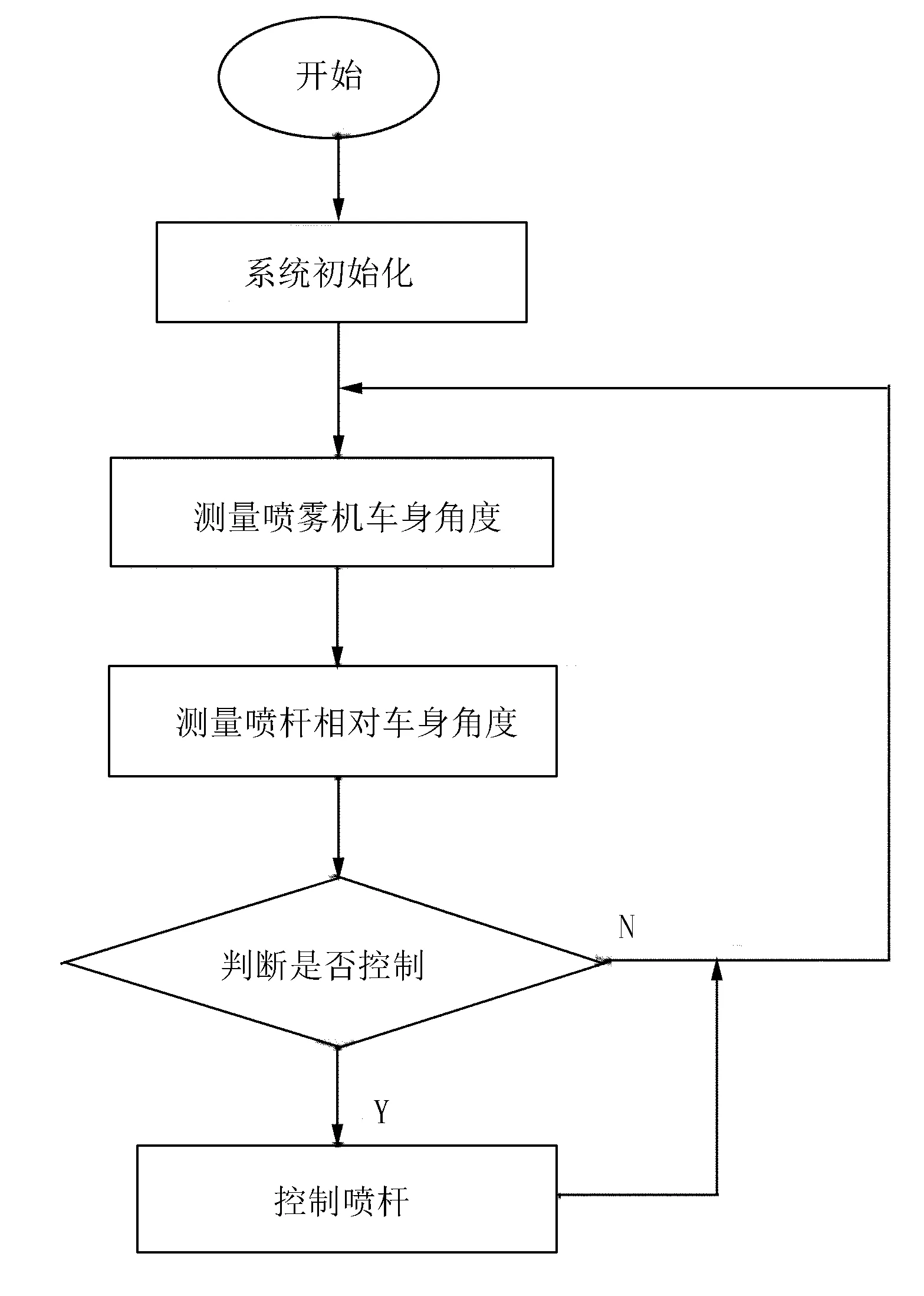
圖7 噴桿自動調(diào)平系統(tǒng)工作流程圖
4 試驗與分析
水田高地隙寬幅噴霧機噴桿自動調(diào)平控制系統(tǒng)的理想狀態(tài)是:不論在任何田間狀況下,噴桿自動調(diào)平控制系統(tǒng)都可以依據(jù)車身傾角傳感器、拉線式位移傳感器檢測噴桿與車身的相對位置,控制噴桿的水平姿態(tài)保持在一定的角度范圍內(nèi)。在實際田間噴霧作業(yè)過程中,噴霧機車身往往會有不同程度的傾斜,因此研究噴桿自動調(diào)平控制系統(tǒng)在噴霧機車身傾斜時的調(diào)平效果和田間實際作業(yè)效果具有重要的參考意義。
4.1 噴桿自動調(diào)平控制試驗
4.1.1 試驗材料
試驗材料包括噴霧機1臺、AHRS姿態(tài)參考系統(tǒng)、2臺叉車(諾力叉車,型號AC30)、計算機、車身傾角傳感器、秒表、控制器、串口調(diào)試助手軟件和MatLab R2014a軟件等。噴霧機選用東風井關農(nóng)業(yè)機械有限公司生產(chǎn)的JKB18C水田自走式噴霧機,最小離地間隙為850mm,噴幅11.5m。AHRS姿態(tài)參考系統(tǒng)由荷蘭XSENS公司生產(chǎn),型號為MTi-300-2A5G4,其配置了高性能三軸加速度計、三軸振動抑制陀螺儀等高端硬件,橫滾角靜態(tài)和動態(tài)測量精度分別為0.2°和0.3°,廣泛應用于機器人、航空航天和自動化等諸多領域。
4.1.2 試驗方法
調(diào)平系統(tǒng)動態(tài)響應試驗以井關JKB18C噴霧機為試驗平臺,噴桿自動調(diào)平控制系統(tǒng)、AHRS由噴霧機自帶12V直流蓄電池供電。其中,AHRS-1用于檢測噴桿姿態(tài)、車身傾角傳感器和AHRS-2用于檢測噴霧機車身姿態(tài),測試系統(tǒng)安裝完畢后,同步配置AHRS和車身傾角傳感器以及串口調(diào)試助手。系統(tǒng)初始化配置完畢后,采用人工調(diào)節(jié)叉車高度,叉車調(diào)速度分快、中、慢3個擋位,分別同步記錄車身傾角傳感器、AHRS-1和AHRS-2輸出的原始數(shù)據(jù),最后利用MatLab2014a軟件對原始數(shù)據(jù)進行分析,每組試驗重復進行3次。
4.1.3 試驗結(jié)果分析
為評價噴桿自動調(diào)平控制系統(tǒng)對噴桿實時控制的性能,對AHRS-1的測量結(jié)果進行計算分析,結(jié)果如表1所示。分析表中數(shù)據(jù)可知:隨著車身傾角變化速率的增加,噴桿傾斜角度的平均絕對誤差、均方根誤差和最大誤差增大,平均絕對誤差最大為0.90°,均方根誤差最大為1.39°,最大誤差為1.70°;車身傾角變化速率對噴桿控制精度影響較大;叉車的位置分別在噴霧機前進方向的右側(cè)和左側(cè)時,噴桿的控制精度相差不大。

表1 噴桿上MTi-300數(shù)據(jù)處理結(jié)果
速度擋位是指叉車的提升速度,R是指叉車位置在噴霧機前進方向右側(cè),L是指叉車位置在噴霧機前進方向左側(cè)。
4.2 田間試驗
4.2.1 試驗材料
為完成本試驗所需要的試驗材料包括井關JKB18C水田自走式噴霧機、雙天線RTK-GNSS導航定位板卡、噴桿高程控制系統(tǒng)、噴桿自動調(diào)平控制系統(tǒng)、差分基站、計算機、MatLab2014a和12V蓄電池、USB轉(zhuǎn)串口數(shù)據(jù)線等。雙天線RTK-GNSS導航定位板卡產(chǎn)自上海司南衛(wèi)星導航技術股份有限公司,型號為K728 GNSS,橫滾角測量精度為 0.4°/R (R為雙天線基線長),數(shù)據(jù)更新頻率設定為2Hz,該板卡支持雙天線輸入,可廣泛應用于對高精度定位、定向或授時有要求的領域,包括智能汽車及精準農(nóng)業(yè)等。
4.2.2 試驗方法
差分基站放置在田間(見圖8),CHANNEL設定為1;將2臺三星六頻測量天線固定在噴桿上,其中一個位于噴桿中點位置,兩個測量天線之間的距離約為2m,差分天線固定在噴霧機車棚頂端。試驗過程中,將噴霧機車速擋位設定為1-L、1-M、1-H,手油門居中放置,控制系統(tǒng)根據(jù)超聲波測距傳感器測量到的噴桿與水平面之間的距離調(diào)節(jié)噴桿高度,根據(jù)車身傾角傳感器測量數(shù)據(jù)調(diào)節(jié)噴桿水平姿態(tài),分別進行噴桿姿態(tài)調(diào)節(jié)(包括高程和水平)與噴桿姿態(tài)不調(diào)節(jié)的對比試驗。K728 GNSS車載定位定向板卡實時測量噴霧機噴桿的高程和水平姿態(tài),并將數(shù)據(jù)通過USB轉(zhuǎn)串口線輸入至計算機,保存數(shù)據(jù)用于后續(xù)數(shù)據(jù)分析。
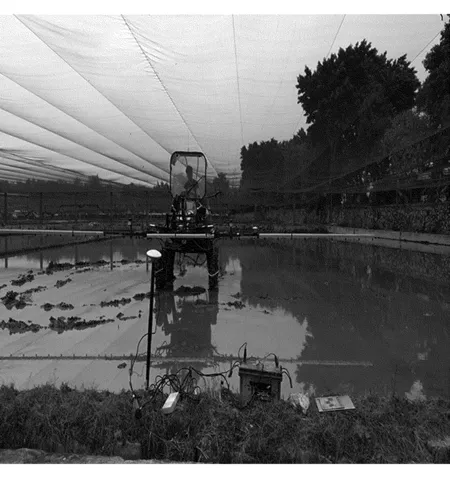
圖8 田間試驗
4.2.3 試驗結(jié)果與分析
為評價噴桿自動調(diào)平控制系統(tǒng)的性能,采用K728 GNSS車載定位定向板卡實時測量噴桿的實際傾斜角度,數(shù)據(jù)處理后獲得噴桿傾角的平均誤差、均方根誤差和最大誤差,結(jié)果如表2所示。試驗表明:噴霧機行走速度對噴桿水平調(diào)節(jié)有影響,噴桿相對于水平面的平均絕對誤差最大為0.79°,均方根誤差最大為0.85°,最大誤差為1.70°,噴桿自動調(diào)平控制系統(tǒng)可以對噴桿水平姿態(tài)進行有效控制。
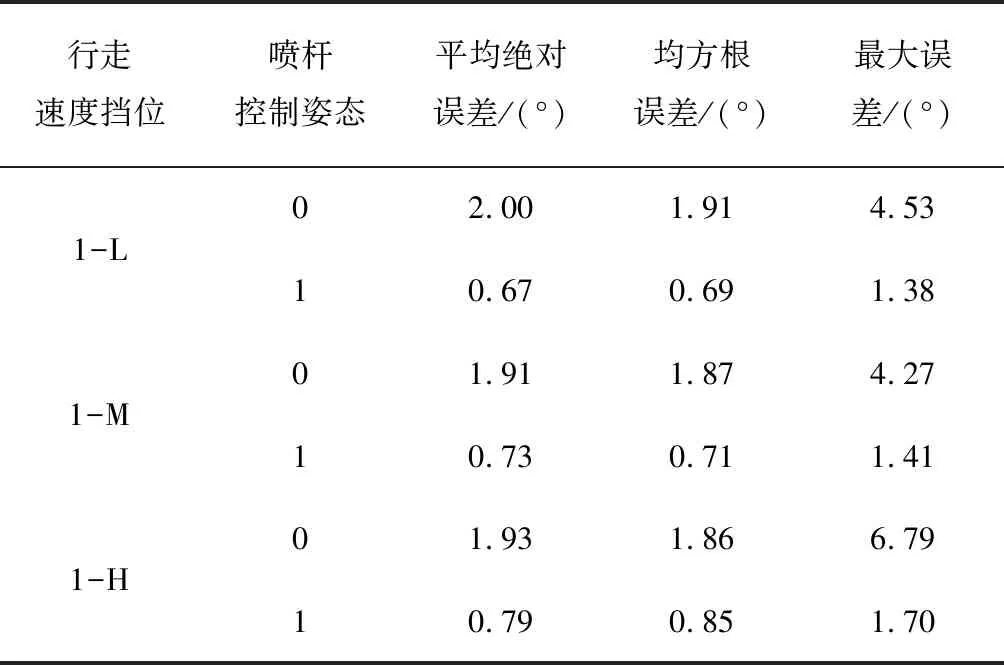
表2 噴桿水平數(shù)據(jù)處理結(jié)果
0表示控制器不對噴桿進行水控制,1表示控制器對噴桿進行水平控制。
5 結(jié)論
1)設計了一種噴桿自動調(diào)平控制系統(tǒng),包括基于MEMS慣性傳感器的噴霧機車身傾角傳感器和控制器,實現(xiàn)了對噴桿水平姿態(tài)的自動控制。
2)基于水田自走式噴霧機設計了噴桿調(diào)平試驗,使用AHRS分別測量噴霧機車身和噴桿傾角。試驗結(jié)果表明:隨著車身傾角變化速率的增加,噴桿傾斜角度的平均絕對誤差、均方根誤差和最大誤差增大,平均絕對誤差最大為0.90°、均方根誤差最大為1.39°、最大誤差為1.70°,車身傾角變化速率對噴桿控制精度影響較大。
3)為考察噴桿自動調(diào)平控制系統(tǒng)的田間作業(yè)性能,采用K728 GNSS車載定位定向板卡測量噴桿水平傾角數(shù)據(jù)進行了田間試驗,結(jié)果表明:噴桿姿態(tài)變化幅度明顯減小,噴霧機行走速度對噴桿姿態(tài)調(diào)節(jié)精度有較大影響,噴桿相對于水平面的平均絕對誤差最大為0.79°,均方根誤差最大為0.85°,最大誤差為1.70°。
