VR技術在拖拉機零配件設計中的應用
2019-05-27 08:47:44劉文娟
農機化研究 2019年10期
劉文娟
(遼寧機電職業技術學院,遼寧 丹東 118000)
0 引言
隨著當前計算機水平的不斷進步,各行業進入智能化設計與制造時代。近年來,新興的VR技術被相繼應用于工業仿真、娛樂設施、軍事航天、室內設計及醫學等領域,包含三維繪圖設計技術、多功能傳感裝置交互接口技術與高清晰顯示技術。經參閱相關文獻可知,機械設計領域中的產品三維設計與更新可與先進的虛擬現實技術產生接口,主要表現在零配件的三維建模與仿真裝配方面,圖1為基于VR技術的零配件設計與裝配場景。

圖1 基于VR技術的零部件設計與裝配
另一方面,當前兩者融入應用研究較少,為了促進我國農業機械產品的設計水平,筆者就農用機具拖拉機中的通用零配件設計與改進引入VR技術展開研究分析。
1 核心設計理念
通過設置一個虛擬的三維空間,實現五感的仿真模擬,營造一個接近于現實的場景,在此空間進行體驗、動作、評價等,可稱之為虛擬現實技術(Virtual Reality )。在我國應用較為廣泛的拖拉機零配件設計與優化方面,傳統的做法表述為:在CAD環境下完成零件尺寸的精確繪制,在滿足尺寸公差的要求基礎上,經過零件的幾何裝配信息完成拖拉機整機的裝配設計與修改,存在設計周期長、耗費精力大的缺陷。為提升拖拉機零配件的設計效率,采用當前機械領域核心設計理念,利用VR技術進行緊密融合,考慮零配件本身的尺寸大小、VR環境的設置,同時引入裝配自由度與裝配約束的管控,形成計算機工藝規劃、裝配規劃與路徑規劃,從多層次多角度進行零配件設計與裝配質量評價。
結合拖拉機在進行田間作業過程中各零配件的相互配合與動作原理,給出擬設計拖拉機的主要零配件及技術參數,涵蓋發動機系統、傳動系統、主要執行系統等,如表1所示。

表1 拖拉機主要零配件設計

續表1
其各個裝置的尺寸協調是應用VR技術進行機械設計的關鍵環節,此過程需結合Pro/E繪圖與3D成型技術,以達到預期設計效果。
2 VR建模設計
2.1 數學模型建立
拖拉機傳動部件、調速系統的零配件設計與裝配需要滿足特定的功能控制要求。在虛擬仿真環境下進行組合時,結合機械設計與裝配約束方式基本理論(見圖2),定義平移與旋轉兩種動作行為。同時,考慮正反兩個方向,構成4×3矩陣,得到拖拉機VR裝配的特征控制矩陣方程M1~M4為
(1)
(2)
(3)
(4)
式中 0—表示該方向上相鄰部件間不存在裝配約束;
1—表示該方向上相鄰部件間存在裝配約束。

圖2 零件設計與裝配約束方式
2.2 物理模型設計
為保證在VR場景實現完整裝配與調控,通過正確計算,給出幾何參數設計與運動控制要求,建立拖拉機變速裝置的物理模型(見圖3),從而進行各相鄰零配件間相互定位;零件的接觸碰撞通過NC程序量化細節的修整,其他傳動軸裝置同步利用Pro/E進行繪制。
2.3 VR裝配調控
根據零件的建模展開VR場景構建,整體結構的搭配與虛擬場景仿真是兩大核心步驟。工作時,進入VR裝配調控,通過套接字程序將拖拉機的三維機械結構與虛擬環境BIND,整機的裝配圖形輸出必須與機械結構的存儲和傳遞信息符合,并有效對場景中的障礙物進行定位識別。此處給出部分程序段:
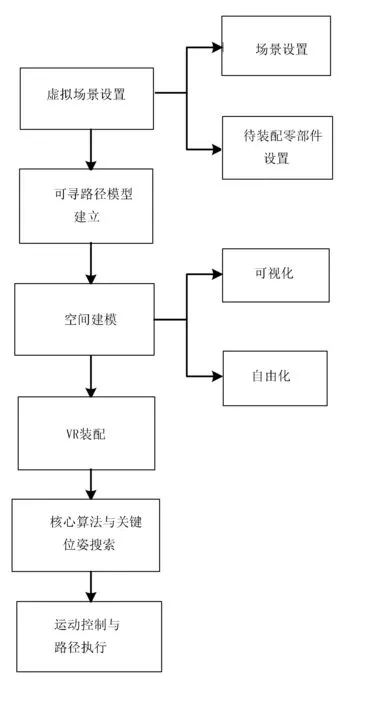
unitsPerMeter = “1” minOgreVersion = “1.6” author =”OgreMaxScene Exporter”> …… …… “NoMaterial”/> 根據編制的VR仿真主函數進入VR場景,主函數與傳感器輸入進行對象更新,通過遍歷全程實現拖拉機零配件的VR裝配調控,主要流程如圖4所示。 圖3 拖拉機變速裝置物理模型設計 圖4 VR裝配仿真場景下調控流程圖 在VR技術路徑的規劃與實時跟蹤調控方面,設計了拖拉機零配件VR裝配路徑,如圖5所示。針對拖拉機的零配件裝配參數與VR仿真場景設置,兩者共同構成虛擬現實場景仿真,進一步建立零配件的可尋路徑模型;通過核心控制算法后臺指導,拖拉機零配件在VR場景條件下進行關鍵位姿搜索與調整,從而實現裝配體的運動控制與路徑執行;整個過程中實現最佳路徑的獲取與裝配過程的可視化,避免不合理的路徑產生。 圖5 拖拉機零部件VR裝配路徑規劃簡圖 進行VR仿真試驗時,考慮與實際環境相比,存在感知能力較差、缺乏可操作性的難點,首先進行條件設置如下: 1)VR試驗場景保證足夠的動態光照與場景渲染; 2)硬件設備層裝備調試正常,包括PLC控制及DP通訊模塊等; 3)數據反饋與方位交互參數準確。 VR試驗控制簡圖如圖6所示。以判斷拖拉機零件裝配約束是否有效為控制主線進行精準定位操作,在內部參數的調控下,完成VR環境下的拖拉機的零配件設計試驗。若出現接觸位姿不當的情況,反饋至后臺控制程序,實現全方位、可視化及捷徑化的機械設計與裝配。 圖6 VR試驗流程控制簡圖 表2給出拖拉機零配件VR裝配控制功能及腳本模塊的功能實現,主要包含零件接觸檢測、方位運動控制、跟蹤移動與邏輯判斷。為準確讀取VR場景及拖拉機部件模型,進行參數初始化,部分程序如下: #include “stdafx.h” #include #include #include DL_tractorMesh 0 …… 表2 拖拉機零配件VR裝配控制功能及腳本 采用VR技術與機械設計基本理論結合,完成仿真試驗。圖7為VR試驗裝配后的拖拉機傳動裝置模型剖視圖,從視覺角度考慮,其裝配效果良好,并且內部參數設置合理,各零配件銜接度較好。 圖7 VR試驗裝配后模型 對VR試驗的數據進行處理與換算,選取關鍵參數進行對比分析,得出如表3所示的拖拉機VR試驗關鍵參數數據。由表3可知:設計可視度較實體建模與裝配改善效果可提升9.1%,零配件的約束度和位姿調控時間均能滿足設計要求,分別可達到93.7%和0.52s;拖拉機的整機裝配精度VR技術應用環境較實體建模稍有降低,但是其裝配精度可達90%以上,VR技術應用可行。 表3 拖拉機VR試驗關鍵參數數據對比表 1) 分析了拖拉機零配件設計與組裝的基本原理,選取關鍵部件進行機械設計,利用虛擬現實技術核心理念,建立VR設計應用的數學模型并用Pro/E軟件進行物理模型繪制,導入可視化的VR場景進行零配件裝配,實現了可視化功能。 2) 根據設計需求,VR裝配調控實行C++語言后臺控制,并重點根據VR場景下的裝配流程進行路徑規劃和VR仿真試驗。 3) 試驗表明:VR技術應用拖拉機零配件的機械設計與裝配思路可行,各項參數與實體建模環境具有高度的一致性,具有一定的推廣價值,有利于VR技術應用于其他農用機具的設計與更新。

3 仿真試驗
3.1 條件設置


3.2 過程分析


4 結論
猜你喜歡
機械工業標準化與質量(2023年6期)2023-09-26 06:43:34現代裝飾(2020年7期)2020-07-27 01:27:42湖北農機化(2020年4期)2020-07-24 09:07:12流行色(2020年1期)2020-04-28 11:16:38建材發展導向(2019年10期)2019-08-24 06:25:34藝術啟蒙(2018年7期)2018-08-23 09:14:18電子制作(2018年8期)2018-06-26 06:43:40海峽姐妹(2017年7期)2017-07-31 19:08:17Coco薇(2017年5期)2017-06-05 08:53:16工業設計(2016年1期)2016-05-04 03:59:38
