基于Arduino的電解鋁多功能天車的防撞系統(tǒng)的設計研究
2019-05-31 00:45:24任強勝
四川冶金 2019年2期
關鍵詞:信號
任強勝
(四川省絲綢工程技術研究中心,四川 成都 610031)
多功能天車是鋁電解生產線的關鍵設備之一,也是現(xiàn)代預焙陽極鋁電解生產的關鍵設備,能滿足鋁電解車間高熔鹽、大電流、強磁場、多粉塵的工作環(huán)境。一條電解生產線一般配備多臺多功能天車,電解車間的各項日常作業(yè)都離不開多功能天車,其主要用于電解車間換極、出鋁、抬母線、槽上部結構及電解車間其它重物的吊運等作業(yè)[1]。一直以來,因電解車間作業(yè)煩雜,且經常存在兩臺甚至多臺多功能天車跨區(qū)域交叉作業(yè)的情況,致使天車兩兩相撞的事故時有發(fā)生。不但造成了設備修理的直接經濟損失,而且還影響了電解正常生產作業(yè),造成了巨大的人力、物力、財力方面的損失。針對這一情況,分析問題存在的原因,主要有兩個:一是設備存在缺陷,沒有電氣防撞功能和提示功能,機械限位不能滿足高速行駛時的防撞要求;二是天車操作工注意力不夠集中。
鑒于以上兩個原因,為提高人員、設備的安全性,降低財產損失,首先要解決設備存在的缺陷問題,增加天車電氣防撞連鎖和電氣防撞報警,以實現(xiàn)設備的本質化安全。同時解決天車操作工注意力不集中時,提示天車操作工注意天車運行情況。在原有機械式防撞裝置的基礎上加裝一套防撞裝置,通過遠程測距方式,Arduino數據采集器實時采集運行軌道上的兩車距離。將采集的信號送入大車運行控制系統(tǒng),控制系統(tǒng)發(fā)出降速、報警、停車指令。
本文對防撞系統(tǒng)的測距和控制進行了一定的研究,就目前應用較為廣泛的幾種測距方式進行分析比較,設計出最適合鋁電解車間復雜工作環(huán)境的測距方案,以及一套防撞系統(tǒng)為安全生產提供技術支持。
1 無線測距技術分析
隨著光電子的發(fā)展,現(xiàn)有測距技術主要以超聲波、紅外線、激光作為主要方式,以上三種測距技術得到了廣泛應用,而且根據環(huán)境、功能使用要求的不同,選擇不同的測距方式。
1.1 超聲波測距
超聲波測距的原理是利用超聲波在空氣中的傳播速度為已知,測量聲波在發(fā)射后遇到障礙物反射回來的時間,根據發(fā)射和接收的時間差計算出發(fā)射點到障礙物的實際距離[2]。主要應用于倒車提醒、建筑工地、工業(yè)現(xiàn)場等的距離測量。但易受環(huán)境影響,如溫度、風速、粉塵等。
1.2 紅外線測距
紅外線測距利用的是紅外線傳播時的不擴散原理[3]。因為紅外線在穿越其它物質時折射率很小,所以長距離的測距儀都會考慮紅外線,而紅外線的傳播是需要時間的,當紅外線從測距儀發(fā)出碰到反射物被反射回來被測距儀接受到,再根據紅外線從發(fā)出到被接受到的時間及紅外線的傳播速度就可以算出距離。但紅外線測距有一個缺點,就是不同的面返回的光線強度不一樣,黑色返回的數據要比白色低許多,所以光線強度和距離不一定完全成正比,材料一換,對應的關系也就變了。
1.3 激光測距
激光測距的基本原理是先由激光二極管對準目標每秒發(fā)射一百萬個脈沖,經目標反射后激光向各方向散射,部分散射光返回到傳感器接收器,被光學系統(tǒng)接收后成像到雪崩光電二極管上,激光測距的基本原理如圖1所示。工作時,激光器發(fā)射激光,光束穿過大氣到達目標,經目標反射后返回,并由探測器接收,測出從激光發(fā)射到反射光被接收所經歷的時間,以此計算出距離值[4]。激光測距測量距離遠(幾十米至幾百米),精度高,受干擾比較小,可以用于精確定位。

1.激光發(fā)射系統(tǒng) 2.光束傳播路徑上的大氣層 3.待測目標 4.反射光探測器圖1 激光測距原理框圖
綜合上述情況,采用激光傳感器應用到鋁電解生產環(huán)境中能保證測距的穩(wěn)定性,不受電解車間復雜環(huán)境的干擾,能有效避免磁場和灰塵的影響。
2 防撞控制系統(tǒng)的研究
2.1 防撞控制系統(tǒng)的總體設計
原有的大車防撞系統(tǒng)主要由終端限位及機械緩沖器組成,如圖2所示。只能實現(xiàn)兩車相撞后的被動防護功能。因每臺天車重達百余噸,基本上是鋼性結構件、其大車高速運行時速度為60米/分以上,具有相當大的慣性力。如果一臺車在停止過程中或者作業(yè)過程中發(fā)生碰撞,將產生巨大的沖擊力,可能導致減速機構、工具機構及電解槽被撞損變形、無法修復,甚至還會造成人員的傷亡。

圖2 機械緩沖器實物示意
通過分析存在的問題,研制一套防撞系統(tǒng)能很好解決以上問題存在的不足。防撞系統(tǒng)結構分為激光傳感器和反光板(待測目標),安裝時激光傳感器安裝在被控制的天車(1號車)上,反光板安裝在被測的天車(2號車)上,被控天車(1號車)上的激光傳感器采集與被測天車(2號車)的位置信號,測量范圍在0-10米內。由于在軌道上有多臺車,所以對天車的左右兩側都要進行實時測量檢測,如圖3所示。要確保激光傳感器發(fā)射光與反光板的反光面角度在85°-95°之間,這樣才能保證在兩臺天車大梁之間的平行度不是很高時,不至于檢測不到天車的位置。
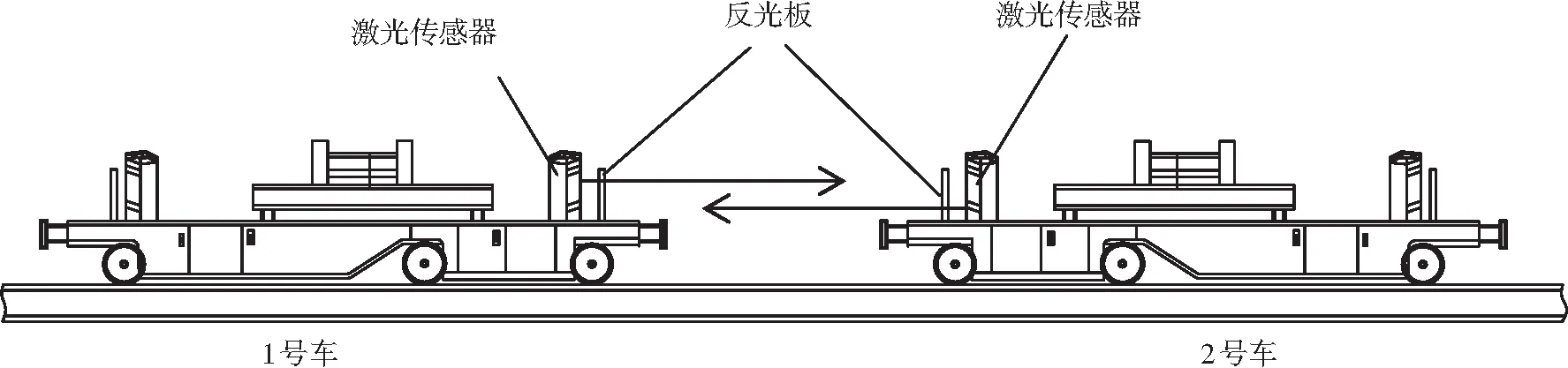
圖3 防撞系統(tǒng)裝置安裝示意圖
設計天車防撞控制功能需要考慮以下三點:
(1)激光傳感器的選擇。由于電解車間的環(huán)境決定選用的激光傳感器必須受干擾比較小,運行穩(wěn)定,我們選用歐姆龍E3Z-LR86的激光傳感器,檢測距離: 0.2~7 m,入光時ON/遮光時ON切換式, 采用PNP輸出方式,工作電壓12-24VAC,輸出負載0-100MA,配備相應的電源。
(2)激光傳感器輸出信號與Arduino數據采集器控制系統(tǒng)輸入信號的傳遞。Arduino數據采集器是一款開源的電子原型平臺,包含硬件和軟件。能通過各種各樣的傳感器感知周圍的環(huán)境狀態(tài)。實現(xiàn)穩(wěn)定采集傳感器數據,通過通訊協(xié)議,實現(xiàn)對采集數據的顯示、分析、存儲[5]。Arduino數據采集器以5VDC開關量輸出信號,而多功能天車的PLC控制系統(tǒng)輸入信號為110VDC信號,通過繼電器將5VDC轉化為110VDC的信號,才能輸入多功能天車PLC控制系統(tǒng)。
(3)天車控制系統(tǒng)需有兩個或兩個以上閑置輸入點。通過增加控制系統(tǒng)硬件配置而增加輸入點數量,能保證一臺多功能天車大車行走的兩個方向的信號能夠輸入給PLC控制系統(tǒng)。
通過分析以上三個問題,激光傳感器能很好解決電解車間強磁場、多粉塵的測量距離的問題,Arduino數據采集器很容易與激光傳感器相連接,運行穩(wěn)定,搭建結構簡單,拓展性能非常高,同時具備標準化的接口很容易與PLC控制系統(tǒng)通信。最終提出多功能天車大車防撞控制功能原理如圖4所示。
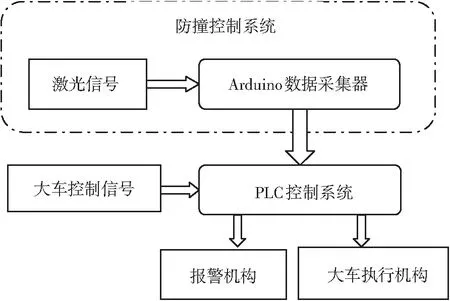
圖4 多功能天車大車防撞控制功能原理圖
2.2 系統(tǒng)工作原理分析
激光傳感器采集到的位置信號,輸入給Arduino數據采集器,通過信號處理計算,以開關量110VDC信號方式發(fā)送給天車控制系統(tǒng),優(yōu)化天車控制系統(tǒng)程序,使控制系統(tǒng)按實際需求進行輸出。編寫Arduino數據采集器控制系統(tǒng)程序時,采用ArduinoIDE編寫庫文件和數據采集程序。同時優(yōu)化PLC控制系統(tǒng)通過位置信號屏蔽部分大車控制信號,使大車減速或者停車,或者同時輸出給報警機構,取消屏蔽時,根據實際情況,選擇大車反向運動控制信號取消被屏蔽的部分信號。如在進行槽上部吊裝時,需要進行雙車聯(lián)動運行時,只要發(fā)出聯(lián)動信號后,防撞功能自動關閉,優(yōu)化后的天車PLC控制系統(tǒng)簡化程序如下[6]:
SOR BST XIC I:1.0/1 NXB XIC B3:1/1 BND XIO I:1.0/5 OTE B3:1/1 EOR
SOR BST XIC I:1.0/2 NXB XIC B3:1/2 BND XIO I:1.0/3 OTE B3:1/2 EOR
SOR XIC I:1.0/3 OTE O:2.0/0 EOR
SOR XIC I:1.0/3 XIC I:1.0/4 XIO B3:1/1 OTE O:2.0/1 EOR
SOR XIC I:1.0/5 OTE O:2.0/2 EOR
SOR XIC I:1.0/5 XIC I:1.0/6 XIO B3:1/2 OTE O:2.0/3 EOR
SOR BST XIC B3:1/1 NXB XIC B3:1/2 BND OTE O:2.0/4 EOR
SOR END EOR
I:1.0/1——右行位置信號;I:1.0/2——左行位置信號;
I:1.0/3——右行一檔;I:1.0/4——右行二檔;
I:1.0/5——左行一檔;I:1.0/6——左行二檔;
2.3 距離測量原理分析
多功能天車運行速度分為高、中、低三種,根據生產現(xiàn)場生產情況設定傳感器測定距離為6米左右,當2號車一旦進入檢測范圍內的敏感區(qū)時,傳感器發(fā)信號給2號車的Arduino數據采集器,觸發(fā)大車行走報警,天車操作工要想解除報警和鎖定位置信號,只需把大車向相反方向開動。如果兩車距離縮小到5.5米時,鎖定位置信號,并把天車速度自動限制為低速(0.2m/s),在距離兩車0.5米時強制停止左行,左行方向被鎖定,只有向右方向可以行走,距離測量原理如圖5所示。
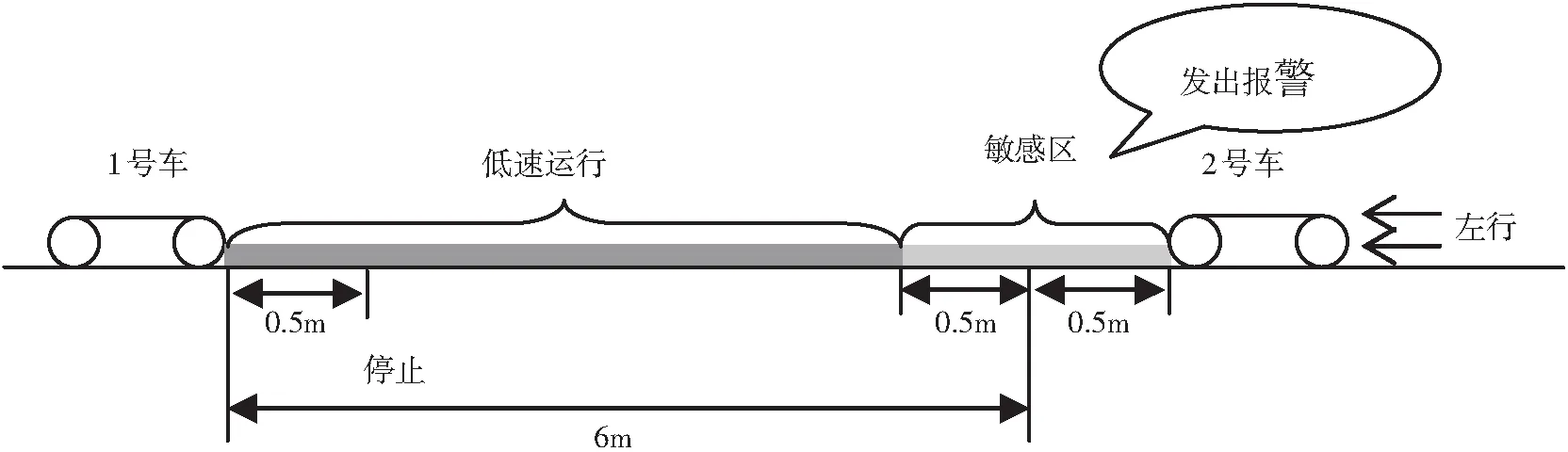
圖5 距離測量原理圖
2.4 應用情況
研制的基于Arduino鋁電解多功能天車防撞系統(tǒng),通過Arduino數據采集器將其信號接入天車本身的PLC控制系統(tǒng)后,運行穩(wěn)定。并且充分利用了天車本身PLC控制系統(tǒng)的拓展資源,系統(tǒng)成本低廉,維護方便。完全滿足電解車間安全、高效使用多功能天車的需要,真正做到為電解生產穩(wěn)定運行保駕護航,
3 結論
通過對現(xiàn)有主要的無線測距方式對比,分析了電解鋁多功能天車防撞系統(tǒng)原有的防撞結構,給出了防撞系統(tǒng)的控制原理及其現(xiàn)場應用,消除了鋁電解多功能天車在作業(yè)過程中發(fā)生撞擊的事故,大車運行安全性能顯著提高,有效保護了天車主體結構,延長了使用壽命。本設計又便于操作和維修,有著很強的實用性和可操作性。同時由于采用Arduino作為數據采集板,為遠程數據采集提供了硬件支持。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06