船載地磁測量中的磁干擾補償方法
2019-06-03 08:30:04朱興樂陳蘇杭
艦船科學技術 2019年5期
朱興樂,陳蘇杭
(1.中國人民解放軍91336部隊,河北 秦皇島 066000;2.中國人民解放軍92840部隊,山東 青島 266000)
0 引 言
海洋三分量地磁場作為重要的地球物理信息,在艦艇磁防護、地磁輔助導航等領域中有著廣泛應用[1-2]。海洋地磁測量常采用船載式方法[3],通過在艦艇桅桿捷聯安裝三分量磁通門傳感器實時監測地磁場變化。由于艦艇的主要構造材料為鋼鐵,本身含有一定的固定磁性,且在地磁作用下會被磁化產生感應磁場[4-5],這將會對地磁測量產生干擾,即磁測量值中不僅包含地磁信息,還包括一定強度的艦艇磁化磁場,如何將其從磁測量值中分離出去以獲得準確的地磁信息,是船載式海洋三分量地磁測量中研究的關鍵問題。
艦艇磁化磁場按照與地磁場間的關系可分為感應磁性磁場與固定磁性磁場,在求解過程中通常單獨分析感應磁性或固定磁性[6-7],綜合求解時過程復雜且精度不高。文獻[8]根據艦艇在特定航向、姿態下的磁測量數據,通過矩陣變換求解出艦艇的磁性參數,由于實際中艦艇受到風浪及重力的影響發生搖擺,航行中難以保持穩定的特定姿態,同時利用的姿態信息相對較少,實際應用時影響了求解結果準確度。為避免解算中航行姿態的限制,提出一種求解艦艇磁化參數的新方法,通過使艦艇繞圓航行,并考慮外部環境對艦艇的姿態變化,采用自適應多種群遺傳算法求解出較精確的艦艇感應與固定磁性參數。此方法符合實際,易于操作,充分利用艦艇多姿態下的磁場,可將艦艇磁化磁場的干擾有效濾除,從而獲得較高精度的海洋三分量地磁場信息。
1 船載三分量地磁測量模型
艦艇磁化磁場分為感應磁性磁場與固定磁性磁場,其中感應磁性磁場與地磁場Be成線性變化關系,兩者可通過感應磁化矩陣K表示;固定磁性磁場不隨外磁場變化而改變,其在三分量上的分布可用固定磁性分量Bp表示。艦艇航行時由于受到風浪及重力的影響產生搖擺,艦艇坐標系與地磁坐標系間產生橫搖角γ、縱傾角θ、航向角φ,這3個角統稱為艦艇姿態角,則地磁場在艦艇坐標系下產生的投影為ABe,A為地磁坐標系與艦艇坐標系間變換矩陣,稱為姿態旋轉矩陣,具體表達為[9]:

在艦艇搖擺狀態下,三分量磁傳感器測量值中不僅包含地磁場信息,還包括艦艇的感應與固定磁性磁場,磁傳感器測量值Bv可表達為:

式中艦艇感應磁化矩陣K表達式為:

其中:kij為艦艇感應磁性磁場i分量與地磁場j分量間的比值,體現艦艇本身的物理屬性。艦艇感應磁場是艦艇在地磁場磁化作用產生的,在艦艇坐標系下的投影表達為KABe,當艦艇姿態發生變化時,由式(2)可知艦艇感應磁場隨之改變,即磁測量值Bv同時改變。當艦艇姿態角取特定值時(例如姿態角分別為0°或90°),轉換矩陣A會出現特殊的表達形式,文獻[8]根據此特征提出了“四航向法”,通過測量艦艇在航向及橫搖特殊角度下的磁場,建立矩陣方程組解算出艦艇磁化特性參數。在實際中艦艇并不能嚴格滿足四航向法中的行駛條件,首先風浪等環境因素導致艦艇在航行中具有不同程度的搖擺,導致規定航向下的磁測量值不穩定,即使是輕微幅度的擺動也會引起磁測量值幾十至數百納特的變化;其次對艦艇姿態角及磁場測量精度提出了較高的要求,姿態角由平臺羅經等導航設備獲得,而導航設備與磁通門傳感器一般均含有固有測量誤差,這將會對艦艇磁特性參數的求解帶來不利影響。
考慮艦艇實際航行中的外部環境因素,并在姿態角及磁測量值含有測量誤差的前提下,通過使艦艇在搖擺狀態下繞圓行駛,使磁測量值中包含更全面的艦艇磁特性信息,以在解算過程中獲得更好的擬合效果,采用自適應多種群遺傳算法對艦艇感應及固定磁性參數求解,相比四航向法減少了操作流程,同時放寬了對艦艇航行姿態特別是橫搖角的嚴格要求,避免了艦艇行駛時的實際操作困難。
2 磁性參數求解方法
采用改進型遺傳算法對艦艇磁特性參數進行求解。由于標準遺傳算法(SGA)含有兩大缺陷:容易早熟,收斂提前結束易陷入局部最優解;后期搜索效率低,使得最終結果偏離全局最優解[10]。為此本文提出采用自適應多種群遺傳算法(AMGA)搜索求解艦艇磁化特性參數,AMGA相比于SGA引入多個種群同時優化搜索[11],各種群間通過移民算子聯系,其最優解是多個種群協同進化的綜合結果,同時通過自適應調整交叉變異概率,兼顧全局收斂與局部細化能力,其算法流程圖如圖1所示。
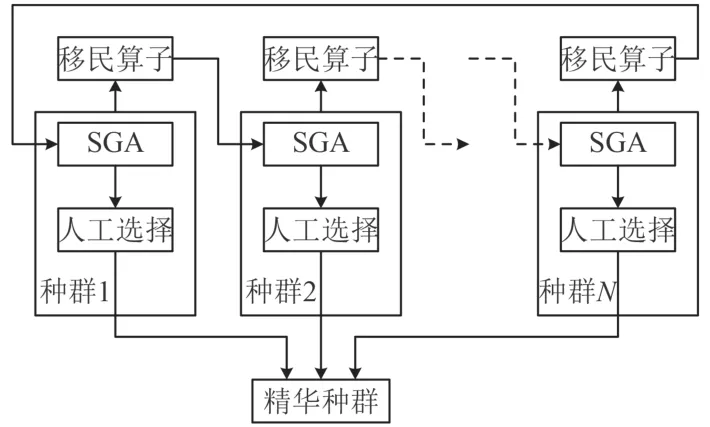
圖1 AMGA算法流程圖Fig.1 Flow chart of AMGA algorithm
主要步驟如下:
1)種群初始化
設定種群個數為N,每個種群中含有M個染色體Xi,Xi=[xi1,..xik,..xi12],xij中i代表第i個染色體,j代表染色體第j個元素,其中xi1~xi9為感應磁化矩陣K中元素,xi10~xi12為固定磁性分量Bp中元素,根據范圍進行編碼。
2)目標函數
設定目標函數

式中:q為磁測量數據個數。通過對種群中多個染色體求解目標值并進行排列,認為目標值小的具有較大的適應度,從而獲得更大的機率被選擇。
3)選擇
按適應度對種群個體由大到小排序,則第i個體Xi被選擇的概率為:
式中:q為磁測量數據個數。通過對種群中多個染色體求解目標值并進行排列,認為目標值小的具有較大的適應度,從而獲得更大的機率被選擇。
4)交叉與變異
按交叉概率pc從父代群體中選擇2個個體Xi與Xj并在第k位上按下式進行交叉:

根據變異概率pm隨機選擇一染色體,對其中某一基因離散變異以產生新的個體。AMGA自適應調整交叉與變異概率,以增強算法的全局收斂能力并提高算法運行速度。搜索過程中pc逐漸減小但pm逐漸增加,以避免陷于局部最優解,其pc與pm變化公式為:
式中:pc0與pm0為初始交叉與變異概率;t為當前遺傳代數;genmax為最大遺傳代數;c與m分別為交叉與變異概率的變化系數。
5)移民
將各種群最優個體定期地引入其他種群,目標種群中最差個體用最優個體替代,以實現種群間的信息交換,提高求解精度與速度,移民操作是對SGA的改進重點。
6)精華種群
每一次進化過程中將各個種群中最優個體放入精華種群,精華種群不參加選擇、交叉、變異,保證進化中個各種群的最優個體不被破壞和丟失。
通過AMGA自適應搜索艦艇的感應磁化矩陣與固定磁性分量,在海洋地磁測量中可作為已知條件解算出地磁三分量真值,此方法相對便捷省力。
3 結果與分析
3.1 艦艇磁場干擾仿真
若磁測量數據分布集中,則求解過程中會遇到多個極小點,為使磁測量數據能夠最大限度反映艦船磁場特性,測量船應在縱傾、橫滾、航向上進行足夠的姿態變化,從而避免在迭代求解過程中出現局部最優解。為此設定艦艇在行駛過程中繞圓行駛,從而使磁測量數據在空間上均勻分布,有利于優化算法的擬合求解。對此方法模擬仿真,設定地磁場與艦艇磁化參數,艦艇繞圈行駛時航向角φ在0°~360°內均勻變化,搖擺狀態下橫搖角γ及縱傾角θ成正余弦規律變化,則由式(2)可得出磁傳感器測量值Bv。
為說明艦艇磁化磁場對地磁測量的干擾作用,設定艦艇在繞圓航行中無搖擺平穩行駛,并對比有艦艇磁化磁場條件下的磁測量值,并采用“誤差圓”的方法進行評估,其原理為艦艇無搖擺狀態下繞圈行駛,無磁干擾存在時磁測量值Bv1在X-Y平面為標準圓,艦艇磁化磁場存在時磁測量值Bv2偏離標準圓,ΔB為2種情形下磁測量值的差值,對比結果如圖2所示。
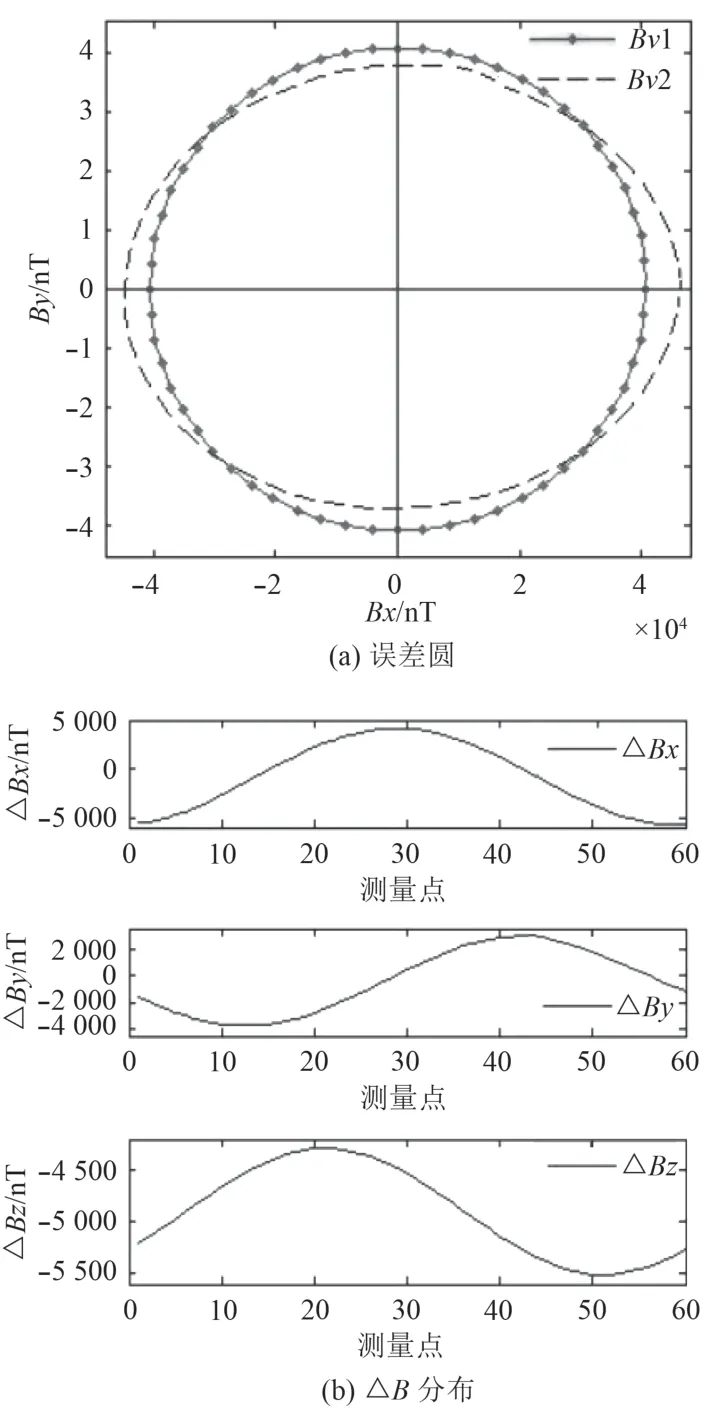
圖2 對比結果Fig.2 Result of Comparison
圖中誤差圓顯示艦艇磁化磁場導致磁場標準圓發生形變,在三分量上干擾達到上千納特,說明艦艇磁場對磁測量影響較大,在海洋三分量地磁測量中必須去除艦艇磁場的干擾。
3.2 磁性參數求解結果及分析
由上述方法模擬磁測量數據,其中地磁場真值可用地磁臺站數據為基準,并對姿態角測量值添加0.05°的測量誤差,磁場測量值加入幅值5 nT高斯白噪聲,以模擬實際測量情況。采用AMGA反推求解艦艇磁性參數,算法的初始參數設定如下:
1)種群數N=10,每個種群包含30個個體,其個體中含有12個基因,分別代表K與Bp中的元素,根據求解范圍進行初始化。
2)初始交叉概率pc0=0.9,交叉系數c=0.3;初始變異概率pm0=0.001,變異系數m=0.05。
3)結束條件中最大進化代數為5 000,最優值的最大保持代數為30。
為比較驗證方法的準確性與優越性,同時采用SGA和四航向法進行求解,其中在四航向法中設定艦艇受風浪影響,做幅度為3°的正余弦姿態變化,將多次矩陣變換結果求平均作為最終值。定義相對誤差為Re,為求解值與真值間的相對誤差,3種方法求解結果對比如表1所示。
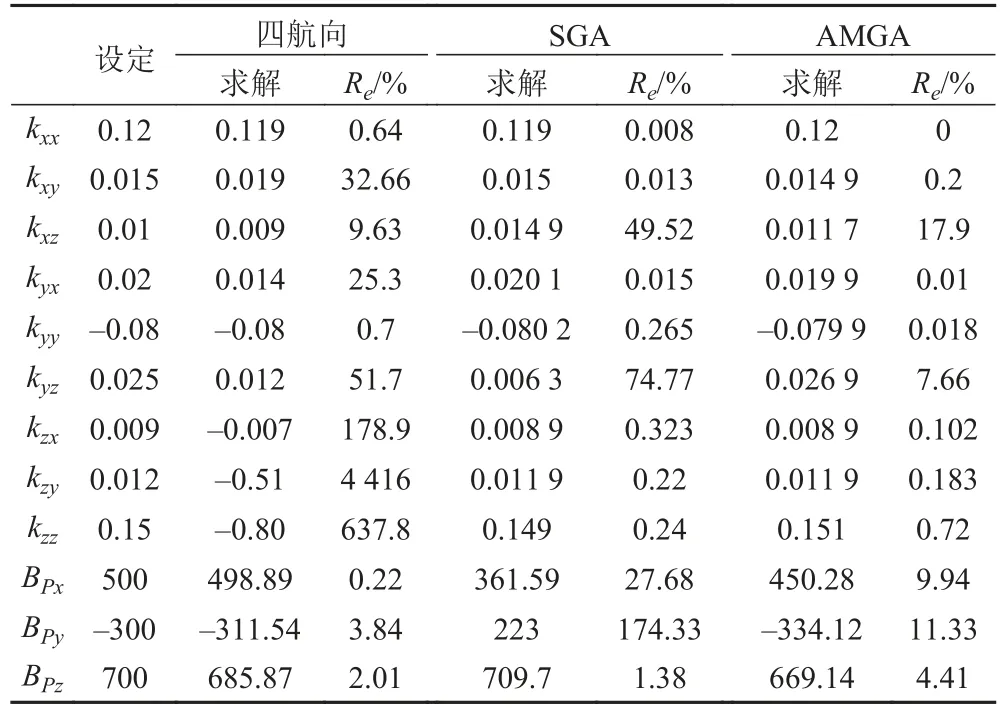
表1 求解結果對比Tab.1 Comparison of calculation result
表1顯示AMGA參數求解精度最高,其中磁化參數kij準確度達到10-3,固定誤差分量Bp的相對誤差Re在10%以內,其收斂性與精確度比SGA得到較大改善。SGA相比四航向法kij求解結果準確,Bp求解誤差相對較大,在式(4)中可看出kij的誤差會被地磁場Be極度放大(Be量級為105nT),kij對測量精度的權重影響遠大于Bp,因此SGA相比四航向法求解結果更好。由于AMGA與SGA均為艦艇在繞圈條件下行駛,2種方法比特定航向姿態下的求解效果更為理想,這從側面也說明要注重磁測數據的差異性與均勻分布性。采用AMGA求解結果對地磁測量數據反推計算,定義地磁計算值Bc與真值B之差為ΔB,在三分量的分布如圖3所示。
可知采用此方法進行地磁測量,在三分量上的最大測量誤差在10 nT以內,說明艦艇磁化磁場的干擾被有效補償,從而獲得了較高精度的三分量地磁信息,從而解決了船載式海洋三分量地磁測量中研究的關鍵問題。
4 結 語
本文對船載三分量地磁測量的艦艇磁化磁場干擾問題進行研究,具有重要的工程應用價值,相比原有方法,其優點如下:1)對艦艇的航行姿態沒有嚴格要求,符合實際行駛情況,操作便捷;對搖擺狀態下的測量數據進行求解,提高了磁測量數據的利用率,保證了求解結果的穩定性。2)采用自適應優化算法求解艦艇磁特性參數,即使姿態角及磁測量數據含有一定幅度的誤差,也可得到較高精度的求解結果,算法收斂性及穩定性較好。
此方法求解效果理想,但要求艦艇導航設備及磁傳感器具有較高的測量精度,這在工程實際中需要著重注意。

圖3 ΔB在三分量的分布Fig.3 Distribution of ΔB in three-component
猜你喜歡
環球時報(2022-12-30)2022-12-30 15:15:00
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2016年1期)2016-01-11 16:53:24
