基于無人機的天線方向圖測試實現方法
2019-06-03 12:51:20劉有才張冬曉
數字通信世界 2019年4期
劉有才,張冬曉
(1.中國電子科技集團公司第五十四研究所遙控遙測專業部,石家莊 050003;2.軍械工程學院電磁環境效應重點實驗室,石家莊 050003)
1 引言
天線是日常生產生活中常見的輻射和接收裝置,其工作頻率越低,天線的尺寸則相對較大。一般根據天線指標要求進行結構和尺寸設計,為驗證天線產品特征參數,需要開展實際測試與校準。GJB 8815等國軍標中對于天線方向圖等參數的測試和校準做出了具體的規范和要求,理想的測試場地為電波暗室,但該場地一般只適合用于高頻天線測試,且要求被測天線使用場景靈活。對于低頻天線,例如廣播電視塔天線,其尺寸和占地面積較大,無法開展天線的實驗室測試活動,只能在開闊場測試天線的方向圖,同樣由于尺寸問題面臨巨大的測試難題。
隨著電子信息技術的快速發展,無人機逐漸走進大眾視野,由于其輕便、低成本、飛行靈活等特點,廣泛應用于社會生產和生活,包括航拍、氣象觀測、農業植保、電力巡線等,受到各行業的廣泛關注。因此,將無人機應用于天線測試是解決當前低頻天線特征參數測量與驗證的新思路與新課題。近年來,國際上在開展用于天文觀測活動的分布式天線陣建設過程中引入了無人機測量技術,研究人員在對陣元和子陣列開展方向圖測量驗證過程中,由于天線尺寸大,覆蓋地域廣,且地面會對天線測量產生影響,因此嘗試利用新興的無人機技術對天線實際方向圖進行測試,驗證仿真設計指標,取得了一定效果[1-6]。本文主要介紹了基于無人機的天線方向圖測量和驗證方法,分析影響該測試方法準確度的外界因素,并給出了當前的研究成果。
2 無人機遠場源系統構成
無人機是一種采用遙控或者程控方式飛行的航空器,主要由飛控系統、數據鏈系統、動力系統、傳感器系統等部分組成,一般分為固定翼和旋翼兩種類型[7-9]。無人機搭載射頻信號發生系統作為飛行載荷,開展天線原位測量,如圖1所示。

圖1 飛行遠場源
相較于固定翼無人機,旋翼無人機飛行靈活、操縱性更強,因此一般采用旋翼無人機作為飛行測試平臺。以圖1(a)六旋翼無人機平臺為例,平臺內置GPS導航模塊,采用多星空間距離后方交會的方法測量得到無人機所處空間位置。此外,平臺內部慣性測量單元能夠測得無人機的姿態角,包括方位角、俯仰角和滾轉角,保持穩定的飛行姿態。通常情況下,無人機采用鋰電池供電,續航時間能夠達到15min,滿足常規天線的測試要求。射頻信號發生系統作為無人機載荷,要求該系統尺寸勻稱、重量輕質,滿足無人機載重限制和平穩飛行條件。信號發生器及電池置于無人機機身底部,采用輕薄金屬包裹,作為天線的部分地平面,輸出信號通過同軸電纜連接偶極子天線,利用平衡轉換器抑制同軸線外皮的高頻電流。
被試天線(陣)由于尺寸較大,且容易受到周圍環境影響,適宜采用原位測量方式,根據天線互易性定理,利用被試天線接收無人機遠場源發射的射頻信號,由于遠場測試要求和信號發生系統輕質需要,無人機飛行較遠且信號源功率受限,因此接收信號微弱;此外,為了減小測試活動對天線方向圖造成的影響,需要利用長電纜連接被試天線和接收機,信號經過電纜的額外衰減后進一步減小,利用低噪聲放大器補償電纜損耗,能夠有效降低接收機靈敏度要求。
3 飛行測試方法
無人機搭載遠場源,通過采用不同的飛行策略,能夠測量得到不同的天線方向圖[10]。一般情況下,無人機沿著被試天線輻射方向圖的E面或者H面以固定高度近似直線航向水平飛行,如圖2所示。
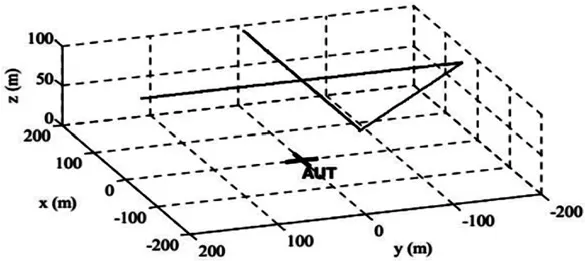
圖2 無人機水平飛行路線
由于信號源的偶極子天線是線性極化,因此能夠測試得到被試天線在某頻點的共極化或者交叉極化方向圖。但是該飛行策略存在一定缺點,首先,隨著被試天線到無人機方向觀察角度的增大,無人機飛離天線的距離也逐漸變大,導致空間路徑損耗增加,該變化范圍直接影響地面接收機的動態范圍;其次,為了達到大觀察角度下方向圖測試目的,無人機飛離天線的距離越遠,要求飛行器的續航時間也越長,而且只能得到天線的一維方向圖。
因此,可以采用更為復雜的飛行策略,如圖3所示,將一維方向圖測試拓展到二維方向圖測試。
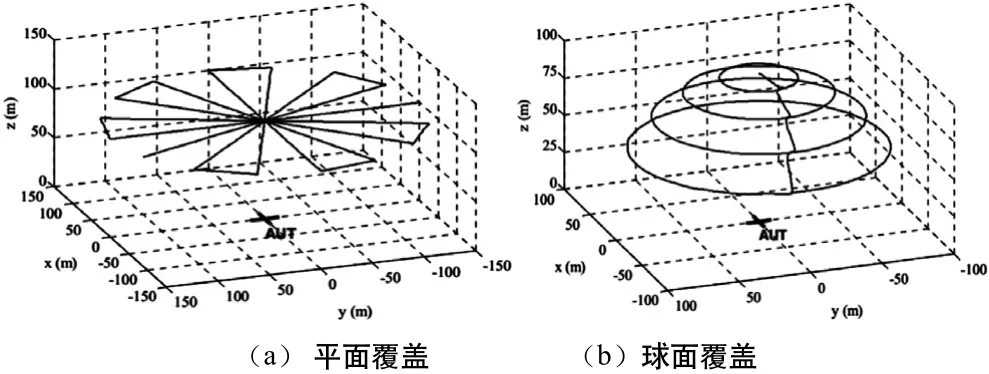
圖3 無人機復雜飛行路線
圖3中,無人機在水平面或者球面飛行測試,能夠得到被測天線關于俯仰角θ和方位角φ的天線方向圖。其中,圖3(a)中的飛行路線由多條不同偏航角度的直線組成,且都位于相同高度的平面內,其覆蓋面積大,采樣密度密度隨著飛離被試天線而減小。圖3(b)中,無人機飛行路線由幾條同心圓組成,且每條包線位于相同高度的平面內,采樣密度更均勻,每條包線距離被試天線的距離相同,因此該飛行測試過程中,信號的路徑損耗大小一致。該飛行路線要求無人機的偏航角與飛行速度矢量垂直,且被試天線的偏航角在同一包線內連續變化。無人機飛行過程中,其飛行位置實時變化,由于空間損耗,在無人機俯仰角和滾轉角保持穩定的情況下,被測天線接收的相同極化方向下的信號功率也發生改變,將該信號大小與對應時刻和位置標記,得到整個飛行包線內的測量參數。由于遠場源發射功率恒定,根據空間損耗和接收信號大小,能夠計算得出天線同向極化的方向圖。
4 方向圖求解
被試天線將遠場源輻射場轉化為傳導信號,經過低噪聲放大器放大后到達接收機,接收功率與遠場源發射功率、發射天線增益、路徑損耗等因素有關,即[11-12]:P(1)
式中,gAUT是被試天線的增益;單位矢量表示被試天線球面參考系統的觀察方向;M表示極化失配因子;Pr是測試得到的輸出功率;是從被試天線到無人機的距離矢量;gs和Ps分別是遠場源的輻射方向性系數和發射功率;GR表示低噪放和線纜損耗總的增益;無人機的姿態角度α、β、γ分別表示航向角、俯仰角和滾轉角。上式中極化失配因子是遠場源和被試天線極化矢量分量的函數,即(2)
式中,上標co和x分別代表共極化和交叉極化分量。由于測試源的對稱性,對于E面方向圖測試來說,水平面的交叉極化分量接近于0,所以當航向角為0°時,,此時式
將接收功率減去遠場源的發射功率、發射天線增益和仿真得到的發射天線方向性系數、路徑損耗得到被測天線的共極化方向圖。
5 天線測量應用及典型影響因素分析
作為天文觀測用天線陣的一部分,SAD天線陣子項目是由意大利負責設計和研制,以Vivaldi陣元為測試對象,其寬度和高度尺寸約為1.5m,如圖4所示。

圖4 Vivaldi陣元天線
為達到遠場測量目的,無人機飛離地面高度需要控制在70m上,測試得到天線在350MHz工作頻點的E面方向圖,并對比驗證了測試與仿真一致性以及導航精度和姿態角對測試結果的影響,結果如圖5所示。
圖5中給出三種實際測試得到的E面方向圖數據,與仿真結果對比發現,采用高精度PPK-GNSS導航定位并考慮姿態角對測試精度的影響條件下,得到的測試結果與仿真結果一致性較好,誤差在1dB以內;若將高精度導航替換成普通的機載GPS導航系統,由于定位誤差減低一個數量級,測試結果偏差較大;若只采用高精度導航而忽略航向角偏差帶來的測試誤差,實際測試得到的方向圖對稱性較差,主要原因是無人機實際飛行過程中航向角會在一定角度范圍內漂移,此外外界自然風可能會導致飛行姿態隨機變化幅度變大,導致測試結果惡化。因此,開展原位天線方向圖測試應該盡量選擇低風速天氣條件,要求無人機搭載高精度導航定位裝置,并考慮飛行姿態角帶來的誤差。
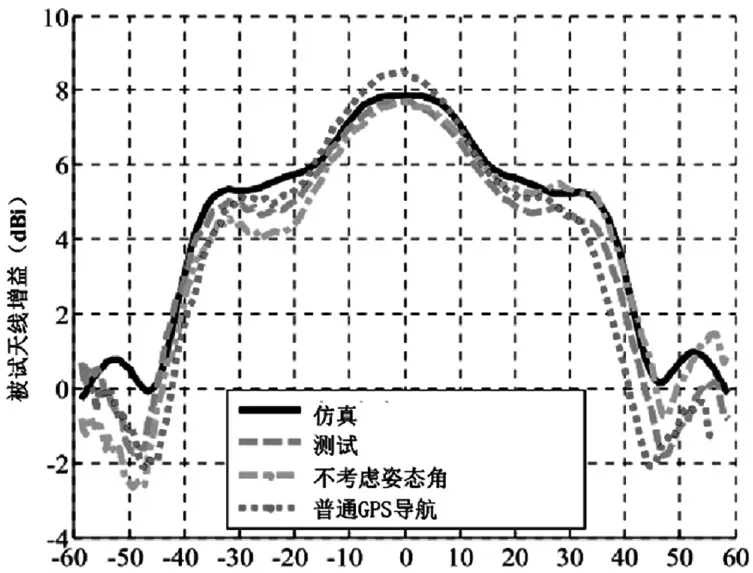
圖5 仿真測試結果對比
6 結束語
為了滿足天線遠場測試要求,將無人機作為飛行平臺,搭載射頻信號發生系統,飛離天線,按照預定航線飛行,測量被試天線的接收功率,根據弗里斯公式能夠分離出天線方向圖函數。隨著高精度傳感技術、人工智能和電池行業的持續發展,無人機飛行穩定性、精確性以及續航能力的提高必將推動天線原位測試技術向著成熟化和專業化方向發展,破解當前分布式大面積天線陣測試難題,為航天發展和深空探測助力。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
