瞄準誤差對多通道X射線KB顯微鏡一致性的影響
2019-06-04 07:44:18陳志強李亞冉忻秋琪穆寶忠
光學儀器 2019年2期
關鍵詞:效率
陳志強,李亞冉,忻秋琪,穆寶忠
(1.同濟大學 物理科學與工程學院,上海 200092;
2.同濟大學 教育部先進微結構材料重點實驗室,上海 200092)
引 言
X射線Kirkpatrick-Baez(KB)顯微鏡是激光慣性約束聚變(ICF)研究的高性能診斷儀器,由于其空間分辨率、集光效率高等優勢,在內爆、RT不穩定性等實驗中發揮了重要的作用[1-3]。多通道KB顯微鏡可以在一次打靶實驗中獲得多幅圖像,加上分幅相機可以實現時間空間診斷[4-6]。近年來,我國神光-Ⅲ主機、美國OMEGA、法國LMJ等裝置都研發了多通道X射線KB顯微鏡系統[7-10]。在神光-Ⅲ主機裝置上,八通道X射線KB顯微鏡系統通過雙光路瞄準節進行瞄準,利用診斷儀操縱器(DIM)搭載平臺和自身的調節裝置進行真空下的姿態調整。實驗發現,裝置上的在線結果有時與離線標定結果存在一定的差異,如各通道圖像強度差異、像間隔差異等,其中,瞄準誤差是造成這些差異的主要原因。受多通道X射線KB顯微鏡光學結構的影響,瞄準誤差對各個通道的光路影響是不同的,最終影響多個通道成像的一致性,給物理結果分析帶來困難。本文通過光線追跡的方式,結合系統實際應用,分析了視場中心對準、物距、像距誤差對分辨率、各通道系統效率、像間隔的影響,提出了解決瞄準誤差可行性方案。研究結果對多通道X射線KB顯微鏡在強激光裝置上的瞄準和應用具有重要的參考意義。
1 八通道 KB 顯微鏡參數
由于掠入射反射式成像的單通道KB顯微鏡是由兩塊相互正交放置的球面或柱面反射鏡組成[11],其有效地校正了單塊球面反射鏡在掠入射成像時產生的嚴重像散。其子午和弧矢方向的成像分別滿足[12]:
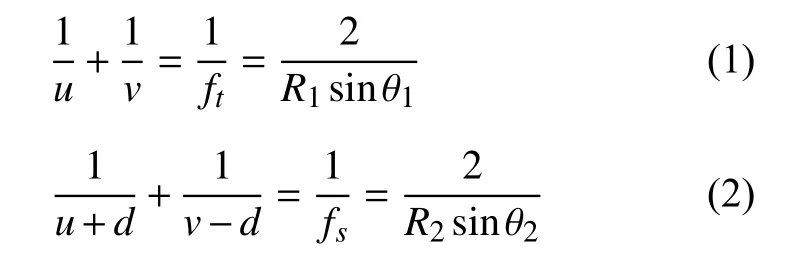
式中:u為物距;v為像距;d為沿光軸方向的反射鏡長度;f、R和θ分別為反射鏡的焦距、曲率半徑和掠入射角度(grazing angle,GA),下角標t和s分別表示子午和弧矢方向。基于式(1)和(2)設計得到的光學參數如表1所示,其中M表示放大倍數。八通道KB顯微鏡的光學結構如圖1(a)所示,物鏡共有6塊球面反射鏡組成,各個通道之間采用“鏡子共用”的方式,各反射鏡之間的相對空間位置由“支撐錐芯”確定[13-14],且能夠保證反射鏡具有一定的空間旋轉角,最終在像面上實現了4行2列的像點排布,并被大畫幅的分幅相機記錄,從而實現在一次打靶實驗中可以獲得具有時間和空間分辨的8幅圖像。這些像點在分幅相機像接收面上的分布示意圖如圖1(b)所示,其中像點1、2、7、8和像點3、4、5、6分別是經圖1(a)中顯微鏡的前兩排和后兩排反射鏡聚焦成像產生,這兩組像點對應的顯微鏡通道在成像上具有一致性。L12(L78)、L24(L13)、L46(L35)、L28(L17)分別表示像點 1和2(7和 8)、像點 2和 4(1和 3)、像點 4和 6(3和5)、像點2和8(1和7)之間的距離。

表1 八通道 KB 顯微鏡的光學參數Tab.1 Optical parameters of eight-channel KB microscope

圖1 八通道KB顯微鏡結構及成像示意圖Fig.1 Schematic of the eight-channel KB microscope
為了提高球面反射鏡在掠入射成像時的反射率,通常會在反射鏡表面基底上鍍制相應的膜層。本文的KB顯微鏡利用磁控濺射的方法,在反射鏡硅基底上鍍制了W/C雙周期多層膜,有效地提高了鏡面反射率、增加了掠入射角度等,還能拓展多層膜的掠入射角度帶寬(約為0.1°),保證更大的物方有效視場(約為300 μm),對應的能量分辨(△E/E)約為0.1,從而實現準單色化成像。根據光學結構,本文反射鏡設計了三組掠入射角度的多層膜鏡,掠入射角度分別為1.175°、1.141°和 1.128°,相應的雙周期多層膜反射率模擬曲線如圖2所示。

圖2 W/C 多層膜反射率曲線Fig.2 Reflectivity of the W/C periodic multilayers
在實驗室條件下,八通道KB顯微鏡先通過X射線成像的方式對各個通道進行校準,找出8個通道共同對應的最佳物點位置,再用模擬靶球(直徑約100 μm)精確地標定該位置。顯微鏡在真實靶場應用時會搭載在DIM平臺上,通過雙光路瞄準節與模擬靶球的標記位置耦合,實現瞄準基準從模擬靶球到瞄準節的轉移。但在靶場實驗過程中發現,對于物點的瞄準往往會存在一定誤差,沿垂直光軸方向誤差量約為50 μm和沿光軸方向誤差量約為200 μm;像距瞄準誤差量約為20 mm。中心視場的瞄準誤差會打破各通道之間原有的視場一致性,物距的瞄準誤差會引起掠入射角度和放大倍數的改變。這些瞄準誤差會對八通道KB顯微鏡的成像空間分辨率、像間隔和系統效率產生影響。
2 視場和物距的變化分別對分辨率的影響
單通道KB顯微鏡的成像性能可由垂軸像差表征[15]:

式中:δ表示垂軸像差;q表示視場尺寸。在零視場處,垂軸像差主要受軸上點球差影響;在離軸視場處,垂直像差不僅受軸上點球差影響,還受軸外像差影響,且離軸視場越大,受軸外像差影響越大。圖3(a)中虛線代表通過式(3)建立的理論空間分辨率模型結果,實線代表通過光線追跡模型對空間分辨率的模擬結果。從圖中可以看出,在±200 μm視場內,理論空間分辨率和通過光線追跡模擬的空間分辨率變化量分別約為2.0 μm和2.9 μm。雖然這兩條曲線在數值上存在一定差異,但二者的變化趨勢是一致的,從中心視場變化到邊緣視場,受軸外像差影響,顯微鏡的空間分辨率線性下降。二者之間的差異是由于理論空間分辨率模型的結果是一個近似值。物點沿光軸方向變化時,顯微鏡通道1(顯微鏡第1、2排反射鏡組成的KB顯微鏡通道)和通道3(顯微鏡第2、3排反射鏡組成的KB顯微鏡通道)的空間分辨率模擬曲線如圖3(b)所示。從圖3(b)可以看出,物距在±200 μm范圍內改變時,顯微鏡各個通道空間分辨率的變化量很小(0.2~0.3 μm)。所以,顯微鏡的空間分辨率受視場變化的影響較大,受物距變化的影響較小。

圖3 八通道KB顯微鏡的空間分辨率分別隨視場和物距變化量的變化曲線Fig.3 Spatial resolution of eight-channel KB microscope as a function of the FOV and the variable of object distance respectively
3 視場、物距和像距的變化分別對像點間隔的影響
根據八通道KB顯微鏡成像光路的幾何近似關系,像平面上的像點間隔L可表示為[16]

式中:α和M分別為反射鏡的傾斜角和放大倍數;θ為掠入射角度;u為物距。從式(4)可以看出,像點間隔的影響因素包括掠入射角度θ,物距u和放大倍數M。當物點沿垂直光軸發生水平方向移動時,在±50 μm范圍內,L24變化量約為0.06 mm,像點間隔L12、L46、L28的值基本保持不變。物點沿垂直光軸發生豎直方向移動時也有類似的變化。當物點沿光軸方向改變時,會引起顯微鏡各通道的掠入射工作角度、物距和放大倍數的改變。物距變化范圍為(u-200 μm,u+200 μm)時,像點間隔L12、L24和L28減少量分別約為0.57 mm、0.60 mm和0.51 mm,L46增加量約為0.67 mm。除了物點的瞄準誤差會造成像點間隔的改變,像距的誤差也會導致其變化。當像距沿光軸方向由小變大時,像點間隔L12、L24和L28會線性增大,L46幾乎保持不變。當像距發生變化時,像點間隔L46大小主要取決于顯微鏡第3排反射鏡的掠入射角度和反射鏡的傾斜角大小。在本文的顯微鏡設計中,兩者差值很小,使得經過第3排反射鏡的光線,在子午方向上接近沿水平出射,所以在像距由小變大過程中幾乎不會引起像點間隔L46的變化。像距變化范圍為(v-20 mm,v+20 mm)時,像點間隔L12、L24和L28增加量分別約0.34 mm、0.35 mm和0.70 mm,L46保持不變。因此,像點間隔L受中心視場變化的影響較小,但受物像距變化的影響較大。
4 視場和物距的變化分別對系統效率的影響
由于反射鏡表面鍍制的雙周期多層膜具有一定的角度帶寬,當中心視場和物距的變化均能引起顯微鏡各個通道與物點形成的視角發生改變時,會導致鏡面反射光線掠入射角度發生變化,反射鏡的反射率也隨之發生改變,從而引起顯微鏡不同通道的系統效率發生差異。KB顯微鏡的系統效率定義為Ω×Rm2(θ)[14],其中Rm(θ)為鏡面掠入射角度對應的反射率,Ω為幾何集光效率,其定義如下
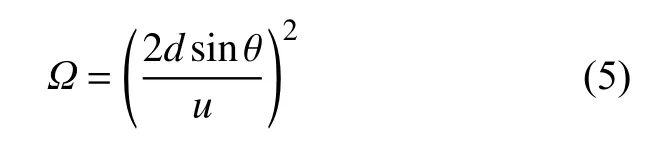
圖4表示利用光線追跡模擬顯微鏡不同成像通道的系統效率隨中心視場變化的結果。從圖4(a)可以看出,當物點在沿垂直光軸方向變化時,由于受多層膜角度帶寬限制,八通道KB顯微鏡成像通道1的系統效率隨物方視場變化而劇烈變化。通道1的峰值效率約為7.72×10-7,從圖中虛線區域可以看出,通道1能夠在約350 μm×450 μm(子午×弧矢方向)的視場范圍內,保持顯微鏡系統效率約不低于2.57×10-7。且在該視場內,從中心視場變化到±150 μm范圍,通道1的系統效率降低了約59.5%。通道3的系統效率隨視場變化與通道1結果相似,如圖4(b)所示。為了兼顧顯微鏡各個通道既滿足共視場又保證系統成像效率,對比圖4(a)和(b),八通道KB顯微鏡系統可在子午和弧矢方向上,保證在約250 μm×400 μm視場范圍內系統效率約不低于2.75×10-7。物距變化范圍為(u-500 μm,u+500 μm)時,通過計算八通道顯微鏡第1、2、3排反射鏡的掠入射角度變化量分別約為 0.004 8°、0.004 5°、0.004 3°。而本文反射鏡鍍制的多層膜角度帶寬約為0.1°,所以物距的改變范圍在±200 μm內時,反射率不會發生強烈變化。由于掠入射角度和物距的變化值都很小,所以集光效率Ω變化也非常小。因此當物距的改變范圍在±200 μm內時,顯微鏡的系統效率將變化不大。受多層膜反射率曲線的影響,從圖5可以看出,當物距變化范圍為(u-200 μm,u+200 μm)時,通道 1 的系統效率降低約3.4%,通道3的系統效率增加約7.1%。所以,瞄準誤差中的視場偏差對顯微鏡系統效率影響較大,物距變化對通道1和3影響較小。

圖4 八通道KB顯微鏡的通道1和通道3系統效率分別隨水平方向和豎直方向視場變化的曲線Fig.4 The system efficiency of eight-channel KB microscope Channel 1 and Channel 3 as a function of the horizontal and vertical FOV, respectively

圖5 八通道KB顯微鏡中心視場的系統效率隨物距變化曲線Fig.5 System efficiency of the central FOV of eight-channel KB microscope as a function of the object distance
5 結 論
本文圍繞著KB顯微鏡在實際應用特性,分析了各誤差對八通道KB顯微鏡成像空間分辨率、像點間隔和系統效率的影響,通過仿真模擬給出量化指標。結果表明:物點在視場內的瞄準誤差對顯微鏡分辨率和系統效率的影響較為明顯,對像間隔的影響較小;物距誤差對像平面內的像點間隔影響較大,對顯微鏡分辨率和系統效率的影響較小。為了更好地發揮八通道KB顯微鏡的成像性能,結合本文的研究,需要提高對于物點和像點的瞄準精度,將中心視場、物距、像距的瞄準誤差分別控制在10 μm、100 μm、1 mm以內,此時顯微鏡系統將有較好的重復性和一致性。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32