察打一體無人機末端突防路徑規劃方法研究?
2019-06-06 08:11:38胡藝銘孫春生李佳寬于洪志
艦船電子工程 2019年5期
關鍵詞:模型
胡藝銘 孫春生 李佳寬 于洪志
(海軍工程大學兵器工程學院 武漢 430033)
1 引言
無人機航跡規劃為在特定目標和約束條件下,尋找從給定起點到設定終點、航跡代價最優的無人機飛行路徑的行為。一般來說,需要考慮的約束條件有無人機系統的機動特性和威脅環境要素等。航跡規劃在無人機的任務規劃系統中占據著極其重要的地位,是無人機任務保障的核心技術[1]。
航跡規劃問題實際上是多條件約束下的最優化問題,其中約束條件和優化求解分別涉及到數學物理建模和優化算法,因此航跡規劃一直是任務規劃系統中的重難點問題。在現有的航跡規劃中,有環境要素和規劃方法兩方面因素需要考慮,其中環境因素,主要包括地形和敵方防空系統,地形通常利用高程數據建立,防空系統以考慮雷達影響為主,在現有的無人機路徑規劃文獻中,一般采用傳統的雷達探測空間模型[1~2],但該模型不能真實地體現出雷達的探測空間;對于規劃方法,常用方法有網格規劃法、概率圖規劃法、人工勢場法、智能算法等[4~6],其中智能算法往往收斂較慢,人工勢場法容易陷入局部最優解,經典的網格規劃算法,如A*和D*算法[7],雖然它們往往能夠計算出分辨率最優的路徑,但是與概率圖算法相比較,卻受限于低維度空間,而概率圖算法中的基于模擬退火的雙向RRT算法[8]可以在三維的規劃空間中得到概率最優的路徑。論文以察打一體無人機末端突防航跡規劃為背景,首先建立以飛行路徑最短和被探測概率最小為目標的最優化模型,然后采用基于混合采樣的雷達模型和基于模擬退火的雙向RRT算法等改進手段對最優化模型進行了細化和求解,實現了無人機末端突防航跡的合理規劃。
2 無人機航跡規劃模型
2.1 最優化模型
將無人機的任務區域稱為配置空間δ,該區域中地形和雷達將δ空間分為三個空間,其中地形占據區域為障礙空間δoi,即無人機無法飛行的區域;雷達空間為半自由空間δfree*,在該空間中需要考慮代價函數c:δfree*→,即在每一個配置點q∈δfree*都對應一個代價代表著雷達的探測概率值以及自由空間δfree。
有了上述的空間定義之后,論文不妨定義無人機飛行路徑ρ的長度為l,為建立以飛行路徑最短和被探測概率最小為目標的最優化模型,將路徑分為 Nbt段,(xu,yu,zu)為路徑上每段的終點坐標,(xrd,yrd,zrd)為配置空間中雷達所在點的坐標,(xwo,ywo,zwo)為地形高程數據的坐標值,w1,w2分別為每段路徑長度和探測概率的權值,L為航路的總長度,TNi為路徑上的探測概率,Rru,m代表雷達與目標的距離。接下來就可以得到無人機航跡規劃的最優化模型:
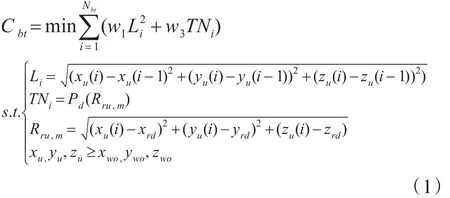
式(1)中(xwo,ywo,zwo)涉及數字高程地形模型的選取,TNi受雷達探測模型和地形模型共同影響,下面將分別介紹。
2.2 數字高程地形模型
在最優化模型公式中,有 xu,yu,zu≥xwo,ywo,zwo,即要求無人機飛行時始終避開障礙空間;因此,為了得到無人機飛行中障礙空間,需要采用了數字高程模型建立地形
目前,對于無人機對地打擊的地形建模的數據來源,一般來自于美國太空總署(NASA)和美國國防部國家測繪局(NIMA)聯合測量的SRTM(Shuttle Radar Topography Mission)數據庫。該數據庫包含世界大約80%的數字高程模型,且分辨率高達 90m[9]。
這里選取了經度從100.402°到100.774°及北緯從28.395°到28.024°的高程數據,地形如圖1所示。
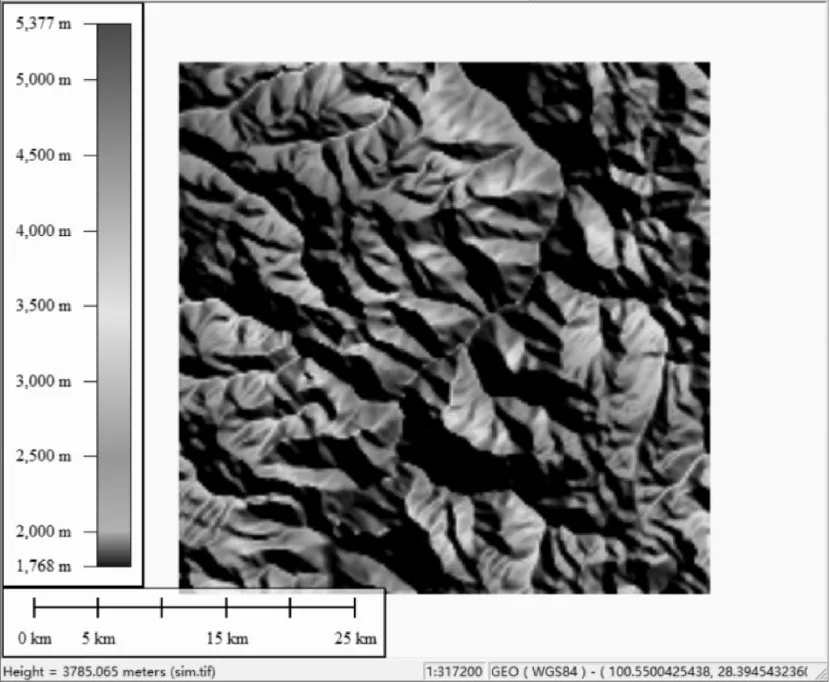
圖1 數字高程模型地形
上述高程數據,在Python的GDAL環境中三維表示如圖2所示。
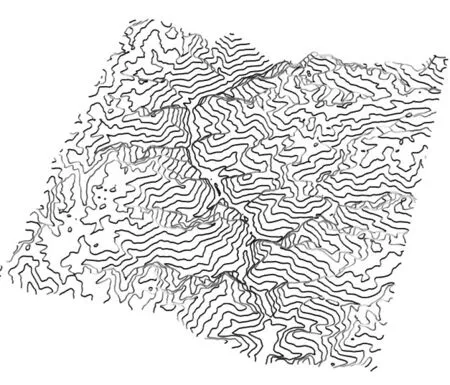
圖2 地形三維圖
2.3 探測雷達模型
為了更加真實地表現出最優化模型中雷達的探測區域,即半自由空間TNi所包含的空間范圍,來用于無人機的末端突防,論文采用基于混合采樣的雷達作用范圍三維建模方法[9]。
本論文考慮的雷達自由空間中的單基地雷達,所以雷達的發射能量和接受能量都由同一根天線決定,所以探測區域可以表示為

式中,Rmax為雷達最大探測距離,F(θ,φ)中θ為方位角,φ為俯仰角。在自由空間中的,不考慮各類影響電磁波傳播環境因素的,方向圖傳播因子F(θ,φ)只與雷達天線方向圖函數有關的雷達。故在上述約定條件下,公式的 Rmax和 F(θ,φ)分別表示如下:

其中Pt為天線發射功率,Gt為發射天線增益,Gr為接受天線增益,σ為雷達目標截面積,λ為雷達波波長,k為玻爾茲曼常數,Ts為接收系統噪聲溫度,D0為檢測因子,CB為帶寬校正系數,L為系統損耗因子。
式(2)中F函數,論文采用高斯型方向函數[11],即式(4),其中θb為波束寬度。

有了上述的探測雷達模型后,通過Python的mayavi環境,可以直觀看到雷達探測范圍如圖3所示。
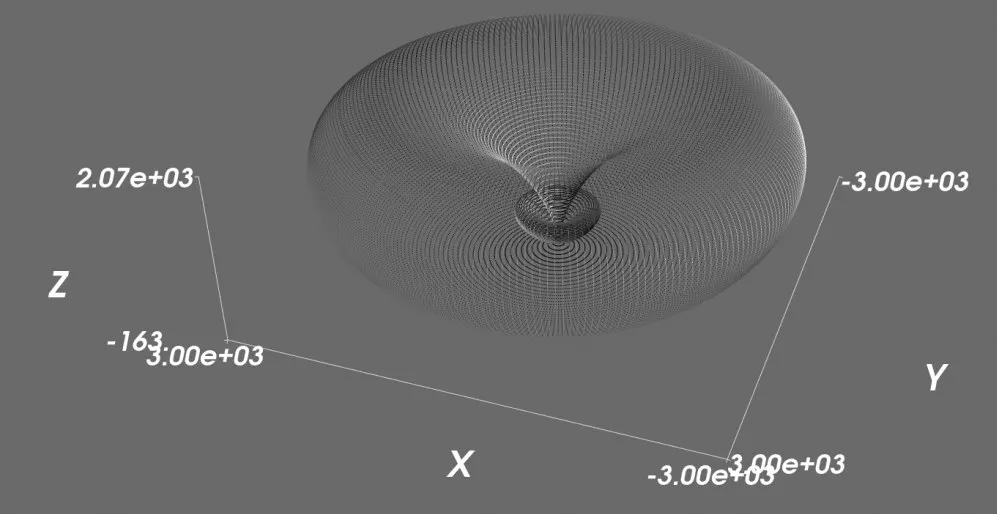
圖3 雷達探測范圍三維顯示
2.4 地形遮蔽條件下雷達探測范圍的修正
雷達的探測范圍 TNi還會受到地形的影響,論文采用幾何光學的方法對遮蔽問題進行處理。一般來說,地形的遮蔽情況為多峰,下面詳細說明多峰遮蔽情形。
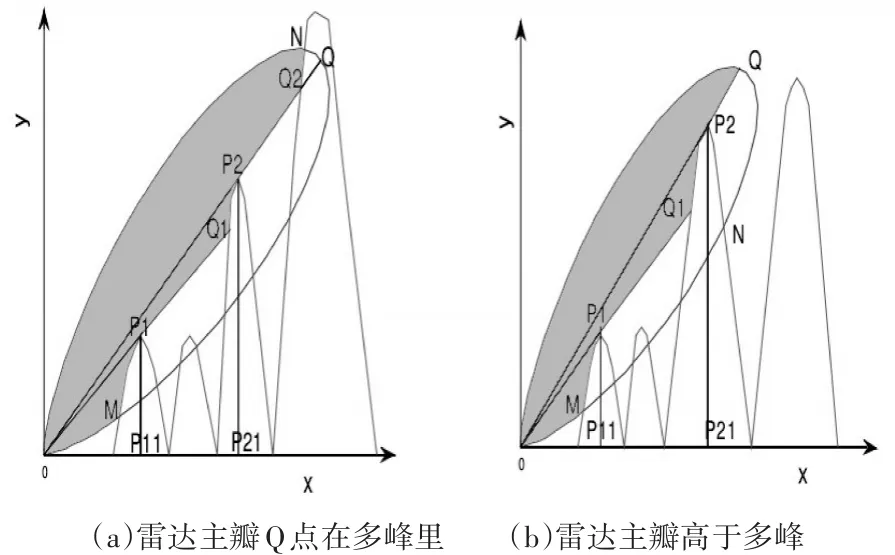
圖4 多峰地形對雷達探測邊界示意圖
連續多峰對雷達的影響分為兩類,一類情況多峰的末交點高于雷達主瓣的Q點,如圖4(a),另一類情況多峰的末交點低于雷達主瓣的Q點,如圖4(b)所示,在這兩種情況下,雷達的探測區域都被修正為灰色區域,對應半自由空間,其中雷達主瓣被遮蔽部分為自由空間,多峰所在區域為障礙空間,即雷達探測空間被修正為半自由空間、自由空間和障礙空間三部分。
2.5 雷達探測概率原理
明確了地形遮蔽條件的雷達探測空間之后,還需要對其中半自由空間中的雷達探測概率TNi進行定量描述,以進一步用于無人機突防威脅代價的計算。
總的來說,雷達探測概率(Pd)與雷達信號的信噪比(SNR)有關,而信號的信噪比(SNR)又與探測目標與雷達的距離(Range)有關。詳細來說,在文獻[14]中,雷達探測概率 Pd可以重寫為Marcum Q函數,即式(5)。
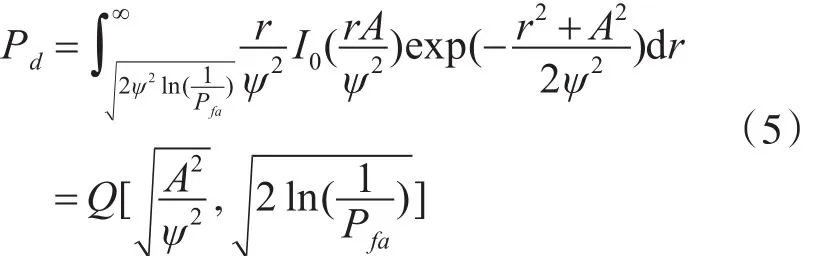
式中,A為雷達信號的幅度,ψ2為雷達噪聲的方差,pfa為雷達的虛警概率。由于過式(5)即可以算出Pd與SNR的關系。
為了進一步考慮目標距離與雷達探測概率的關系,需要分析雷達信號的信噪比的具體表達式[14]:

其中Pt為峰值發射功率,GA為天線增益,σ為雷達目標截面積,λ為發射載波波長,Gibw為時域帶寬增益,Gdop為多普勒處理增益,K為玻爾茲曼常數,T為環境溫度,B為傳輸信號調制帶寬,R為目標距離,L為系統損失,Nf為噪聲系數。
通過2.3和2.4節,確定了雷達的探測區域,而通過2.5節,論文確定了雷達探測區域中雷達的探測概率。
3 航跡規劃算法
對于在給定起終點的情況下,在雷達威脅區域中尋找到一條路徑最短探測概率最小的路徑,即求解式(1),論文采用基于模擬退火的改進雙邊RRT(Rapidly-exploring random)算法;這里首先介紹該算法的評價準則,該準則引導路徑在低探測度區域搜索;然后介紹該算法如何實現。
對于算法的評價準則來說,一個關鍵點是,從力學角度來看,路徑上的點探測概率的增加(或者叫做路徑代價的增加)會對路徑的選取產生斥力;所以,評價一條路徑的好壞是以路徑上點的探測概率高低為標準的,同時,在路徑的距離上加上一個小的懲罰變量,用于在同樣的斥力情況下,選擇路徑較短的那一條。基于這種原則,路徑上的斥力定義為

其中 p+代表路徑中探測概率增加的部分,ε相比于路徑的代價值非常小,L表示飛機路徑。
w的連續形式能夠轉化為便于求解的離散形式,考慮到路徑上的局部極值,w表達式為

其中αi和 βi是路徑上的局部的最小和最大值,=Pd(βi)-Pd(αi)兩個極值之間的正變化;如圖4,總之,路徑的斥力(或代價值)是通過計算極值之間的正變化,并且在路徑中加入一個εl參數以用來選擇斥力相同,路徑較短的那一條。
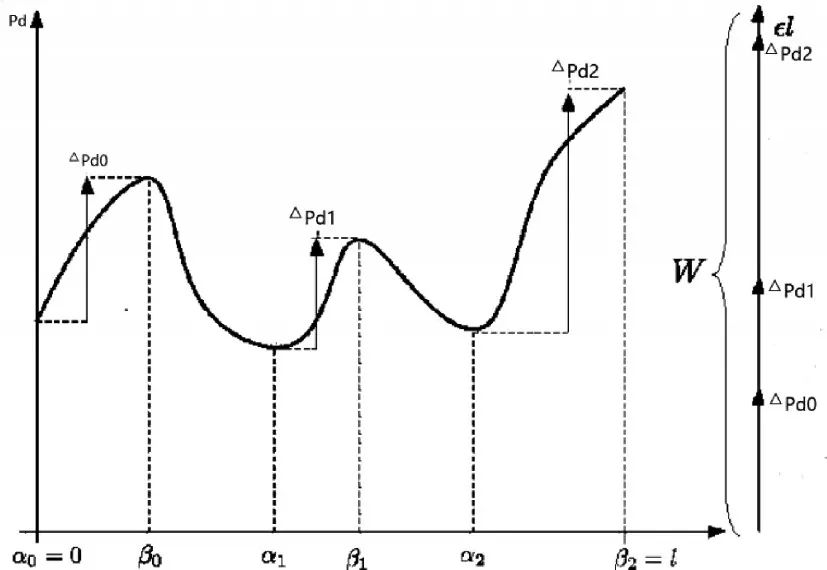
圖5 路徑代價值為Pd增加段之和
值得注意的是,上述描述中,只考慮了路徑中探測概率增大的路徑段,對于探測概率減小的路徑段,算法控制該階段的路徑長度,以控制總路徑的長度,具體的證明如下。
一般來說,路徑總代價值為探測概率增大和探測概率減小段之和,公式表示如下:

通過式(7)、式(8)可以轉化成

因為 Pd(l)和Pd(0)為常數,而εl相對于代價值非常小,故式(10)說明最小化w相當于最小化最右端那一項。
論文采用的算法來同時具備快速擴展隨機算法的探索能力和隨機優化方法在復雜空間中求解全局最小值的能力。換句話說,它使用轉移測試來接受和拒絕潛在探測概率較小或較大的狀態。轉移測試算法具體實現如下。
首先,在雷達探測空間中,高于最大探測概率的Cmax將被舍棄掉,接下來,采用與Monte Carlo方法類似的思路,新配置點被接受的概率是通過比較其探測概率與其父節點的探測概率的差值來得到的。轉移概率 pij被定義如下:
其中Δcij=(Pdj-Pdi)/dij是代價函數的斜率,即探測概率差值除以兩者之間的距離。K是常數,用于正則化表達式;T是溫度參數,用于控制轉化測試的難易程度。
使用該轉移概率參數,探測概率的下降的位置點將會被自動接受,而探測概率的上升,隨著探測概率差值的增加,被接受的概率將指數下降。
在上述的算法中,有一點是論文想要強調的,溫度參數T,它是算法的核心參數,它決定了探測概率差值被接受的難易程度,低溫度情況下,限制了對小差值的擴展,反過來,高溫度下,允許大差值的擴展。同Monte Carlo方法類似,該參數在探索過程中,是保持不變或者逐漸較小的。
介紹了算法中核心的自適應參數后,最后介紹算法的概率完備性,由于論文算法是基于RRT算法,它繼承了RRT算法的概率完備性[8];唯一一點不同是,由于轉移測試的因素,一些擴展點會被舍棄掉,即使在高維凸空間中。
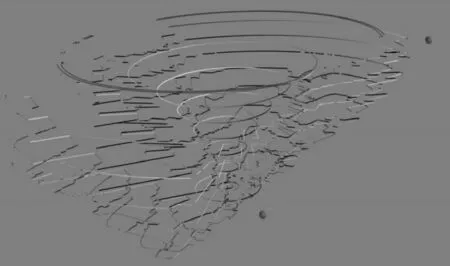
圖6 無人機的起始終止位置
為了驗證本文的算法,將不考慮機動約束,勻速飛行的無人設定從(9.752km,14.304km,3.8km)的起始位置飛往目標位置(8.05km,12km,2.0km),公式中的參數皆取經驗值。計算結果,如圖6所示。
圖6中雷達的位置中心設定為(7.5km,12km),最終通過本文的算法可以得到如下的路徑,和路徑上的探測概率值。
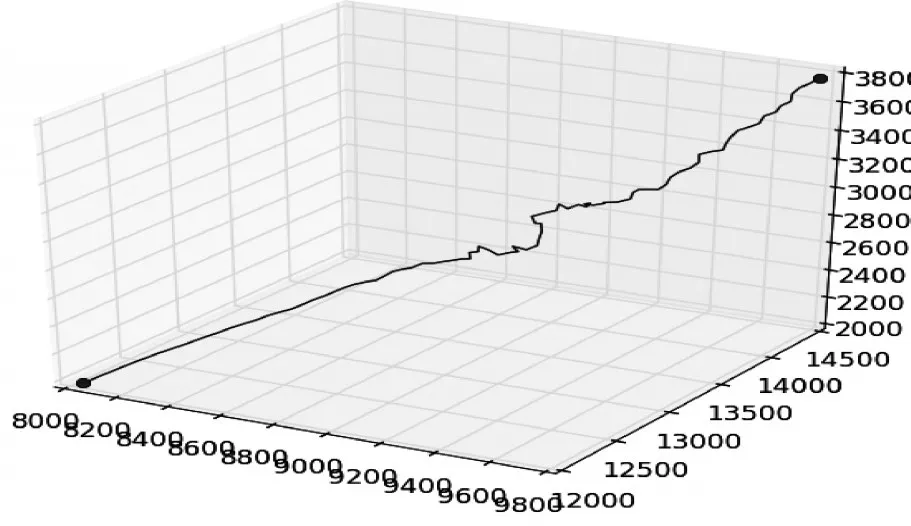
圖7 地形遮蔽條件下雷達探測區域圖
路徑上的探測概率如圖8所示。
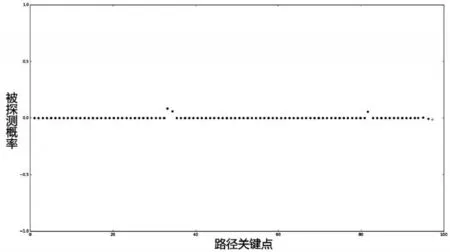
圖8 路徑關鍵點與其探測概率
4 結語
論文研究的路徑規劃方法,可以在有地形遮蔽的雷達探測空間中快速地找出一條路徑最短和被探測概率小的航跡。
將模擬退火算法引入RRT中,使得RRT算法有選擇低探測空間的能力,從而加強無人機飛行的安全能力。
為使本文提出的算法能真實應用,后期工作將對航跡規劃加入更精確的無人機的動力學約束同時也將對算法進行進一步智能優化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19