水產(chǎn)品捕撈機(jī)器人耐壓殼體優(yōu)化分析
2019-06-07 07:22:27劉義翔于曉芳王希貴
森林工程 2019年2期
關(guān)鍵詞:優(yōu)化分析
劉義翔 于曉芳 王希貴

摘要:本文是基于水產(chǎn)品研發(fā)的一種水下捕撈機(jī)器人,采用有限元分析方法對(duì)水下捕撈機(jī)器人的耐壓殼體厚度進(jìn)行優(yōu)化,避免船體承受壓力過大而損壞,保證水下機(jī)器人的正常航行。船體耐壓殼體作為水下捕撈機(jī)械的重要結(jié)構(gòu)部件,不僅要滿足其穩(wěn)定性要求,而且要滿足水下壓力允許范圍內(nèi)的強(qiáng)度要求。優(yōu)化后的機(jī)器人耐壓殼體結(jié)構(gòu)更符合水下作業(yè)機(jī)器人功能要求,總體上減輕機(jī)器人的重量,節(jié)省材料和成本,為實(shí)際工程應(yīng)用提供可靠的參考數(shù)據(jù)。
關(guān)鍵詞:有限元方法; 耐壓殼體; 水下機(jī)械;捕撈機(jī)器人; 優(yōu)化分析
中圖分類號(hào):TP242.2;U674.94文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):1006-8023(2019)02-0069-04
Optimal Analysis of Pressure Hull of Underwater Fishing?Robot for Aquatic Products
LIU Yixiang?1, YU Xiaofang?1, WANG Xigui?2
(1.School of Light Industry, Harbin University of Commerce, Harbin 150028;?2. College of Engineering and Technology, Northeast Forestry University, Harbin 150040)
Abstract:In the paper, an underwater fishing robot for aquatic products is developed. The finite element analysis method is used to optimize the thickness of the pressure hull of underwater robot, which can prevent hull pressure from being damaged to ensure the normal operation of the underwater vehicle. As an important structural component of underwater fishing machinery, the pressure hull should not only meet the requirements of stability but also require its strength within the allowable range under underwater pressure. The optimized pressure hull structure is more in line with the functional requirements of underwater fishing robots, the weight of the robot overall is reduced, the materials and costs of that are saved, and the reliable reference data for practical forestry engineering applications are provided.
Keywords:Finite element method; pressure hull; underwater vehicle; fishing robot; optimal analysis
0引言
海洋中蘊(yùn)藏著豐富的生物資源和礦產(chǎn)資源,隨著陸地及林業(yè)資源枯竭,海洋資源開發(fā)利用對(duì)人類發(fā)展和社會(huì)進(jìn)步的推動(dòng)作用越發(fā)明顯,水下機(jī)器人作為一種高新技術(shù)工具,在海底這塊人類未來最具潛力的可發(fā)展空間中起著至關(guān)重要作用?[1-4]。因此,一種針對(duì)水產(chǎn)品的水下捕撈機(jī)器人應(yīng)運(yùn)而生。水下捕撈機(jī)器人耐壓殼體作為重要組成構(gòu)件,要求其滿足承重與支撐功能的同時(shí),需要具有足夠的強(qiáng)度與穩(wěn)定性,才能在不同工況下完成作業(yè)要求。因此需要對(duì)其進(jìn)行ANSYS有限元優(yōu)化分析,從而確定最佳厚度。在滿足性能要求的同時(shí),減輕整體結(jié)構(gòu)的重量,降低成本。
1耐壓殼體模型建立與簡(jiǎn)化
該耐壓殼體在進(jìn)行有限元分析時(shí),由于結(jié)構(gòu)的復(fù)雜性,有必要對(duì)不重要的復(fù)雜曲面細(xì)節(jié)予以簡(jiǎn)化,以便于求解和分析。
1.1耐壓殼體模型的建立
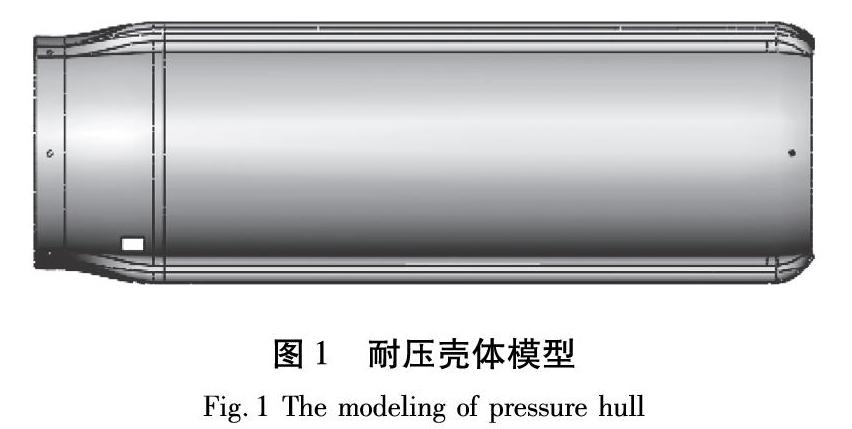
該水下機(jī)器人需要滿足捕撈作業(yè)要求。因此耐壓殼體留有平臺(tái)支撐,便于安裝采集艙。耐壓殼體的模型建立如圖1所示。
由圖1可知,該結(jié)構(gòu)存有過多的曲面,在進(jìn)行有限元分析時(shí),計(jì)算會(huì)過于復(fù)雜,故在不影響整體分析的基礎(chǔ)上,對(duì)該結(jié)構(gòu)進(jìn)行簡(jiǎn)化,以便于后期分析。
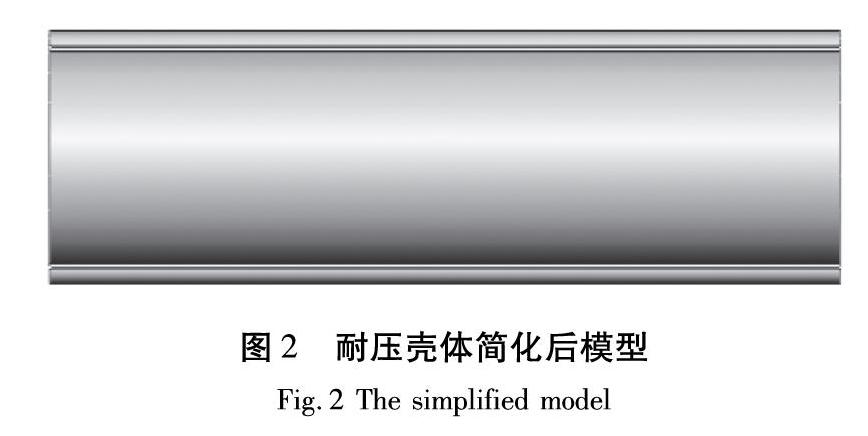
1.2耐壓殼體模型的簡(jiǎn)化
對(duì)耐壓殼體進(jìn)行簡(jiǎn)化的前提是最大限度地使簡(jiǎn)化過后的模型,在進(jìn)行分析時(shí)與原有模型盡可能保持接近?[5-6]。因此,在簡(jiǎn)化時(shí)只去除了部分圓角和過于復(fù)雜的過渡曲面,保留了原始模型的重要特征,基本不影響殼體進(jìn)行有限元分析時(shí)的精確度,簡(jiǎn)化后的模型如圖2所示。
2耐壓殼體的有限元分析
設(shè)定水下捕撈機(jī)器人的作業(yè)深度為50 m,極限作業(yè)深度為100 m,為保證耐壓殼體能在極限工況下滿足作業(yè)強(qiáng)度不被破壞,在進(jìn)行有限元分析時(shí),取極限作業(yè)深度100 m的靜水壓為加載的載荷。
大型重載潛水器的殼體制造一般采用為高強(qiáng)度鋼Q460?[7],但考慮到機(jī)器整體重量,硬質(zhì)鋁合金2A12的密度較小。為了更好地選擇材料,將兩種材料的性能進(jìn)行了比較,見表1。由表1可知2A12的屈服強(qiáng)度與抗拉強(qiáng)度雖然略小于Q460,但由于Q460的密度遠(yuǎn)大于2A12,又由于該機(jī)器作業(yè)于淺海,受載相對(duì)較小,且該機(jī)器整體尺寸也較小,綜合考慮,選取鋁合金2A12作為鑄造材料,該材料為各向同性,介質(zhì)均勻。
根據(jù)經(jīng)驗(yàn),安全系數(shù)取1.5?[8],在該工況下,圓筒形的耐壓殼體厚度為1~3 mm,加厚耐壓殼體壁厚會(huì)提高耐壓殼體強(qiáng)度和穩(wěn)定性,因此厚度取3 mm。
2.1有限元分析的前期處理
利用ANSYSyWorkbench15.0對(duì)該殼體進(jìn)行有限元分析時(shí),需要進(jìn)行前期處理,包括材料厚度、材質(zhì)的確定、網(wǎng)格劃分、施加載荷與添加約束。
材料厚度和材質(zhì)確定為3 mm的2A12鋁合金,網(wǎng)格劃分時(shí)采用面網(wǎng)格,施加的載荷為靜水壓載荷,淺海海水密度?ρ?為1 005 kg/m?3,加速度?a?為重力加速度9.8 m/s?2,方向?yàn)榇怪庇谀蛪簹んw平板,豎直向下,水壓深度?h?為100 m,根據(jù)靜水壓公式,得出所施加載荷?p?的大小如下?[9-10]:
p?=?ρ×a×h=1 005×9.8×100=0.984 9?Pa(1)
除此之外,對(duì)模型添加固定約束,在工作中,該耐壓殼體前、后端面均要與機(jī)器的首尾部通過法蘭盤相連,因此要對(duì)耐壓殼體兩個(gè)端面施加固定約束。由于分析的是耐壓殼體在靜水壓情況下的受力,因此還要對(duì)殼體施加轉(zhuǎn)動(dòng)約束。
2.2分析結(jié)果及后處理
在前期處理結(jié)束后,應(yīng)用ANSYS軟件對(duì)模型進(jìn)行計(jì)算求解,應(yīng)力分析如圖 3所示;位移分析結(jié)果如圖4所示。
由圖3可知,在上述極限深度下的載荷與約束條件下,該耐壓殼體的最大應(yīng)力為42.192 MPa,滿足強(qiáng)度要求,它保證了該機(jī)器能夠在100 m水深的極限工況下進(jìn)行安全作業(yè)。
由圖4可知,耐壓殼體在該工況下的最大位移為0.006 588 7 mm,而該材料的延伸率為10%,因此滿足設(shè)計(jì)要求。
3耐壓殼體的目標(biāo)優(yōu)化分析
綜上分析可知,在3 mm的厚度下,該殼體滿足極限工況的要求,但是對(duì)于水下捕撈機(jī)器人來說,要求盡可能減少重量,因此,需要對(duì)耐壓殼體選擇一個(gè)最優(yōu)的設(shè)計(jì)方案?[11]。
根據(jù)經(jīng)驗(yàn),該形狀的鋁合金殼體,在100 m水深的工況下的殼體厚度范圍在1~3 mm之間,耐壓殼體的優(yōu)化分析是以質(zhì)量輕化為目標(biāo),以最大應(yīng)力不超過216.6 MPa許用應(yīng)力[?σ?]為約束條件,利用ANSYSworkbenc15.0軟件,對(duì)殼體的厚度選擇,進(jìn)行目標(biāo)優(yōu)化?[12-13]。
3.1耐壓殼體尺寸優(yōu)化
在進(jìn)行優(yōu)化分析時(shí),最大等效應(yīng)力是檢測(cè)該殼體是否滿足工作要求的重要指標(biāo)。因此將最大等效應(yīng)力設(shè)置為目標(biāo)函數(shù):優(yōu)化過程中其重要程度設(shè)置為高級(jí),將殼體厚度以及線性位移設(shè)置為低級(jí)。同時(shí)以耐壓殼體的厚度為輸入變量,取值范圍在1~3 mm,最大等效應(yīng)力與最大位移量為輸出變量?[14-16]。經(jīng)過優(yōu)化分析,得到了關(guān)于該目標(biāo)設(shè)計(jì)的三組最優(yōu)解,見表2。
分析由Workbench給出的目標(biāo)驅(qū)動(dòng)優(yōu)化的三組解中,綜合位移變形量、最大等效應(yīng)力與殼體厚度的考慮,選擇殼體厚度為1.795 0 mm的硬質(zhì)鋁合金2A12作為耐壓殼體的材料。可見,在該厚度下的殼體仍然是滿足極限工況的作業(yè)要求,因此耐壓殼體為1.795 0 mm時(shí)是最佳厚度。
3.2優(yōu)化前后對(duì)比
本次水下捕撈機(jī)器人的耐壓殼體優(yōu)化是將厚度從3 mm減少為1.795 0 mm,并且依然滿足工作要求。其優(yōu)化前后各數(shù)據(jù)對(duì)比見表3。
由表3中數(shù)據(jù)可知,優(yōu)化后的耐壓殼體雖然在最大等效應(yīng)力與最大線性位移量上有所增加,但是都在安全范圍以內(nèi),能夠滿足極限工況下的作業(yè)要求,耐壓殼體的質(zhì)量卻減少了0.832 9 kg,相當(dāng)于優(yōu)化前殼體質(zhì)量的40%,優(yōu)化效果十分顯著。
4結(jié)論
該小型水下捕撈機(jī)器人耐壓殼體的優(yōu)化分析,主要是材料的選擇與殼體厚度的確定,上述為理想狀態(tài)下,選擇殼體1.795 mm時(shí)是最優(yōu)厚度,但是在實(shí)際應(yīng)用中,結(jié)合市場(chǎng)現(xiàn)有型號(hào),工程應(yīng)用中厚度應(yīng)確定為2 mm?[17-18]。優(yōu)化后的耐壓殼體質(zhì)量明顯減小,質(zhì)量的改變量相對(duì)于整體質(zhì)量來說相當(dāng)可觀,不僅節(jié)省鑄造原料,降低了制造成本,同時(shí)也減輕了機(jī)器的整體負(fù)重,對(duì)于機(jī)器水下作業(yè)性能也有明顯提升。對(duì)于諸如此類的水下作業(yè)機(jī)器人來說,耐壓殼體的優(yōu)化除了盡可能減輕殼體重量以外,還可以適當(dāng)提高耐壓殼的加工精度,以及進(jìn)行結(jié)構(gòu)上的優(yōu)化,例如環(huán)肋加強(qiáng),都能提高耐壓殼的穩(wěn)定性性能,亦為有效提高耐壓殼體性能的方法。
【參考文獻(xiàn)】
[1]趙樹培.水下機(jī)器人3D建模與結(jié)構(gòu)優(yōu)化分析[J]. 機(jī)電工程技術(shù), 2016,45(4):18-20.
ZHAO S P. 3D modeling technology and structural optimization of underwater vehicle[J]. Mechanical & Electrical Engineering Technology, 2016, 45(4):18-20.
[2]王艷新,唐文秀,吳函,等.基于多傳感器融合技術(shù)的智能搶險(xiǎn)救災(zāi)機(jī)器人設(shè)計(jì)[J].林業(yè)機(jī)械與木工設(shè)備,2018,46(5):17-20.
WANG Y X,TANG W X,WU H, et al. Design of intelligent emergency rescue robots based on multi-sensor fusion technology[J].Forestry Science & Technology, 2018,46(5):17-20.
[3]KIM A, EUSTICE R M. Real-time visual SLAM for autonomous underwater hull inspection using visual saliency[J]. IEEE Transactions on Robotics, 2013, 29(3):719-733.
[4]苗怡然, 高良田, 梁旭, 等. 水下航行器耐壓殼體參數(shù)化設(shè)計(jì)優(yōu)化[J]. 大連海事大學(xué)學(xué)報(bào), 2017, 43 (2): 33-38.
MIAO Y R, GAO L T, LIANG X, et al. Parametric optimization design of the pressure hull for automatic underwater vehicle[J]. Journal of Dalian Maritime University, 2017, 43(2):33-38.
[5]楊岳, 何雪浤,水下機(jī)器人耐壓殼體結(jié)構(gòu)優(yōu)化[J]. 機(jī)械科學(xué)與技術(shù), 2016, 35 (4): 614-619.
YANG.Y, HE X H, Structural optimization of underwater robot pressure hull[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(4):614-619.
[6]KIM A, EUSTICE R M. Pose-graph visual SLAM with geometric model selection for autonomous underwater ship hull inspection[C]. IEEE/RSJ International Conference on Intelligent Robots & Systems, IEEE Press, 2009:1559-1565.
[7]ALVAREZ A, BERTRAM V,GUALDESIL. Hull hydrodynamic optimization of autonomous underwater vehicles operating at snorkeling depth[J]. Ocean Engineering, 2009, 36(1):105-112.
[8]伍莉, 徐治平, 張濤, 等. 球形大深度潛水器耐壓殼體優(yōu)化設(shè)計(jì)[J]. 船舶力學(xué), 2010, 14(5): 509-515.
WU L, XU Z P, ZHANG T, et al. Optimum design of spherical deep-submerged pressure hull[J]. Journal of Ship Mechanics, 2010, 14(5):509-515.
[9]SARKAR T, SAYER P G, FRASER S M. A study of autonomous underwater vehicle hull forms using computational fluid dynamics[J]. International Journal for Numerical Methods in Fluids, 1997, 25(11):1301-1313.
[10]ZHANG N, ZONG Z. The effect of rigid-body motions on the whipping response of a ship hull subjected to an underwater bubble[J]. Fluids & Structures, 2011, 27(8):1326-1336.
[11]陳爐云,王德禹,基于 iSIGHT 的環(huán)肋圓柱殼動(dòng)力學(xué)優(yōu)化設(shè)計(jì)[J].中國(guó)艦船研究,2007,2( 6) : 1-3.
CHEN L Y, WANG D Y. Dynamic optimization de-sign of ring-stiffened cylindrical shell based on iSIGHT[J]. Chinese Journal of Ship Research, 2007, 2(6):1-3.
[12]謝金鑫. 基于參數(shù)化有限元的潛水器結(jié)構(gòu)優(yōu)化設(shè)計(jì)[D].哈爾濱: 哈爾濱工程大學(xué),2010.
XIE J X. Structural optimization design of underwater vehicle based on parametric finite element[J]. Harbin: Harbin Engineering University, 2010.
[13]PHILLIPS A B, FURLONG M, TURNOCK S R. The use of computational fluid dynamics to assess the hull resistance of concept autonomous underwater vehicles[C]. Oceans, IEEE, 2007.
[14]CHEN X, WANG P, ZHANG D Y. Surrogate-based multidisciplinary design optimization of an autonomous underwater vehicle hull[C]. International Symposium on Distributed Computing & Applications to Business, 2017.
[15]楊卓懿,于憲釗,龐永杰,等. 基于多目標(biāo)遺傳算法的潛器外形優(yōu)化設(shè)計(jì)[J].船舶力學(xué),2011,15( 8) : 874 -880.
YANG Z Y, YU X Z, PANG Y J, et al. Optimization of submersible shape based on multi-objective genetic algorithm[J]. Journal of Ship Mechanics, 2011, 15(8):874-880.
[16]GAO T, WANG Y, PANG Y, et al. Hull shape optimization for autonomous underwater vehicles using CFD[J]. Engineering Applications of Computational Fluid Mechanics, 2016, 10(1):601-609.
[17]CHUNG D, HONG S, KIM J. Underwater pose estimation relative to planar hull surface using stereo vision[C]. Underwater Technology, IEEE, 2017.
[18]馬烈.1000 m輕作業(yè)型載人潛水器概念設(shè)計(jì)[D].哈爾濱: 哈爾濱工程大學(xué),2012.
MA L. Conceptual design of 1000-meter light operating manned submersible[J]. Harbin: Harbin Engineering University, 2012.
猜你喜歡
商業(yè)會(huì)計(jì)(2017年1期)2017-03-16 20:02:25
科學(xué)與財(cái)富(2017年3期)2017-03-15 18:23:31
中小企業(yè)管理與科技·中旬刊(2016年11期)2017-02-17 17:21:18
建筑建材裝飾(2016年13期)2017-01-04 11:10:57
文藝生活·中旬刊(2016年10期)2016-11-04 05:58:34
課程教育研究·學(xué)法教法研究(2016年16期)2016-06-30 18:30:03
計(jì)算機(jī)輔助工程(2016年1期)2016-03-15 12:24:50
筑路機(jī)械與施工機(jī)械化(2016年2期)2016-03-12 22:14:57
中國(guó)人口·資源與環(huán)境(2015年5期)2015-07-13 00:47:02
商場(chǎng)現(xiàn)代化(2015年7期)2015-04-20 13:50:35