一種新型的永磁同步電機轉矩脈動抑制方法
2019-06-11 03:39:57崔兆蕾牽長云徐曦錢烈江
計算技術與自動化 2019年1期
關鍵詞:永磁同步電機
崔兆蕾 牽長云 徐曦 錢烈江

摘要:針對永磁同步電機運行過程中氣隙磁場畸變和逆變器非線性因素導致的永磁電機電磁轉矩脈動問題,提出了一種基于諧振調節器和諧波注入抑制永磁電機轉矩脈動的方法。分析了永磁電機在運行過程中產生的諧波數學模型,設計了基于諧振調節器的前饋控制環節、諧波提取算法和諧波電壓注入算法。最后在Simulink仿真實驗平臺上進行了仿真分析,成功的抑制了電機中的電流諧波含量,減小了電流的失真度,改善了電機輸出轉矩的平滑性,驗證了諧振調節器前饋控制和諧波注入抑制算法的正確性和可行性。
關鍵詞:永磁同步電機;轉矩脈動;電流諧波抑制;諧振調節器;諧波注入
中圖分類號:TM351
文獻標識碼:A
永磁同步電機由于擁有體積小、噪聲小、功率因數高等優點,被廣泛應用在工農業生產中[1,2]。但是因為電機輸出轉矩性能的限制,導致很多高精度產業對電機的需求不能夠被滿足。
經過分析知道影響電機輸出轉矩平滑性的主要原因是電機內部存在的高次諧波,而造成電機內部存在高次諧波的原因主要有兩方面:(1)電機內部結構造成的氣隙磁場畸變引起的諧波;(2)構成逆變器的電力電子器件不是理想器件,存在導通壓降。國內外專家針對電機本身引起的諧波問題提出的解決方案主要包括改變轉子永磁體參數[3,4]、改變定轉子結構[5]和改變極槽配合[6]等方法對齒槽轉矩進行削弱。對于逆變器在電流逆變過程中存在的諧波問題主要的解決方案有無死區開關控制法[刀、電壓補償法[8]、時間補償法[9]。但是傳統的補償方法都存在電流過零點檢測不準確的問題[10],導致對逆變器工作過程中存在的導通壓降和續流壓降的補償效果并不好。并且以上方法過于復雜,不易于被廣泛應用。
針對以上方案存在的問題,提出了一種新的轉矩脈動抑制方法,在電流環并聯諧振調節器構成前饋調節,再通過注入諧波電壓的方法消除諧波電流,從而達到抑制轉矩脈動的效果。諧振調節器可以實現對電流諧波的前饋調節,它被廣泛應用于PWM整流器[11]和逆變器[12]中。文中設計了諧波電流提取模塊,通過諧波電流提取算法來得到諧波電流,然后經諧波電壓算法運算得到注入電壓,最后通過諧波補償算法來抵消電機運行過程中存在的5次和7次諧波電流,從而消除了電機中含有的6次諧波轉矩。另外通過諧振調節器消除12次諧波轉矩脈動。該算法已經在仿真平臺上證明了它的可行性。
2 永磁同步電機諧波模型
永磁同步電機在兩相旋轉軸系下的電壓方程為:
從(4)式中可以看出,電機在理想狀態下運行時,只含有直流分量不含高次諧波分量,但由于到PMSM在實際運行過程中,電機本身原因會引起氣隙畸變,從而導致電機在運行過程中會存在高次諧波,致使電機運行性能下降。另外,由電機的本身結構分析可知,電機在運行過程中不存在偶次諧波分量和3次及3的整數倍次諧波分量,由于運行過程中產生的5次諧波電壓矢量的方向與基波電壓矢量的方向相反,可以寫出電機三相電壓的表達式,如式(5)所示。
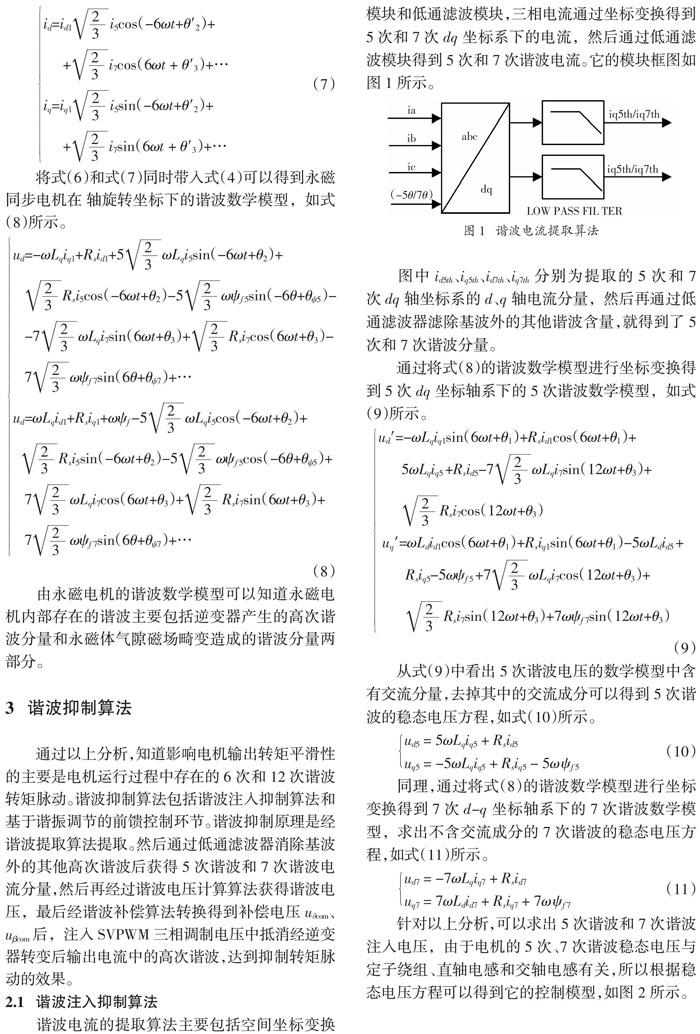
同理,將三相靜止坐標系下的三相電流進行功率不變原則變換到兩向旋轉坐標系下,可以得到坐標系下的電流表達式,如式(7)所示。
由永磁電機的諧波數學模型可以知道永磁電機內部存在的諧波主要包括逆變器產生的高次諧波分量和永磁體氣隙磁場畸變造成的諧波分量兩部分。
3 諧波抑制算法
通過以上分析,知道影響電機輸出轉矩平滑性的主要是電機運行過程中存在的6次和12次諧波轉矩脈動。諧波抑制算法包括諧波注入抑制算法和基于諧振調節的前饋控制環節。諧波抑制原理是經諧波提取算法提取。然后通過低通濾波器消除基波外的其他高次諧波后獲得5次諧波和7次諧波電流分量,然后再經過諧波電壓計算算法獲得諧波電壓,最后經諧波補償算法轉換得到補償電壓‰om、u βcom后,注入SVPWM三相調制電壓中抵消經逆變器轉變后輸出電流中的高次諧波,達到抑制轉矩脈動的效果。
2.1 諧波注入抑制算法
諧波電流的提取算法主要包括空間坐標變換模塊和低通濾波模塊,三相電流通過坐標變換得到5次和7次dq坐標系下的電流,然后通過低通濾波模塊得到5次和7次諧波電流。它的模塊框圖如圖1所示。
從式(9)中看出5次諧波電壓的數學模型中含有交流分量,去掉其中的交流成分可以得到5次諧波的穩態電壓方程,如式(10)所示。
同理,通過將式(8)的諧波數學模型進行坐標變換得到7次d-q坐標軸系下的7次諧波數學模型,求出不含交流成分的7次諧波的穩態電壓方程,如式(II)所示。
針對以上分析,可以求出5次諧波和7次諧波注入電壓,由于電機的5次、7次諧波穩態電壓與定子繞組、直軸電感和交軸電感有關,所以根據穩態電壓方程可以得到它的控制模型,如圖2所示。
在實現PMSM的5次諧波和7次諧波穩態電壓計算中,諧波電壓計算算法在交叉計算環節加入了PI控制器,使計算變的更加精確。然后經過諧波電壓計算算法運算得到相應的諧波電壓分量,最后經過諧波電壓補償算法轉換得到M эcom和uβcom然后補償到SVPWM環節上,諧波電壓補償算法如圖3所示。
2.2 基于諧振調節器的前饋控制
通過注入諧波電流抑制電機轉矩脈動的同時也在電流環并聯諧振調節器改善電流中存在的諧波分量,諧振調節器的傳遞函數如式(12)所示。
式中:為諧振頻率,為比例系數。
從式(6)中可以知道影響電機運行中諧波的主要是dq軸中含有的6次和12次電流諧波,諧波調節器主要以抑制12次諧波為主,基于諧振調節器的電流環結構框圖如圖4所示。
2.3 PMSM控制系統
該系統的前饋控制采用諧振調節器并聯PI控制器,在保證更好的調節電流環的同時還可以擁有更大的增益,提高電機轉速的跟蹤性,并且還可以消除電機中電流的諧波含量,改善電機的輸出性能。永磁同步電機整體的系統控制框圖如圖5所示。
4 仿真結果分析
為了驗證該算法的準確性和有效性,在Simulink仿真平臺上進行了加入諧波抑制算法和未加入諧波抑制算法的電機運行狀態的仿真對比分析。
4.1 電機運行狀態分析
在給定轉速n= 300 r/min時,在t=0.03 s時加入轉矩5 N.m,分別對加入算法前后電機中的三相電流和輸出轉矩做了仿真分析,具體的效果對比圖如圖6所示。
從圖6的(a)和(b)比較中可以看出算法加入前三相電流的脈動非常大,三相電流失真度比較高,振蕩嚴重,加入諧波抑制算法后,波形獲得了明顯的改善,說明該算法對電流的改善效果比較好,可以顯著提高電機中電流的正弦效果,使電機擁有更好的性能。從(c)和(d)的對比中可以看出轉矩脈動得到了明顯的抑制,圖(c)中電機的輸出轉矩震蕩幅度比較大;圖(d)中的輸出轉矩的震蕩幅度明顯降低,輸出轉矩的平滑性得到了明顯的提高。在圖(c)和圖(d)的比較中可以看出后者的轉矩波形比前者在震蕩幅度上大大減小。在經過該算法調節后電機中電流和輸出轉矩的畸變率都獲得了很好的抑制,電機的整體性能得到很好的提高,并且輸出轉矩擁有很好的跟蹤性。
4.2 諧波含量分析
除了對電機的基本運行狀態對比分析外,還將電機輸出的相電流進行快速傅里葉變換,檢測了電流中的諧波含量。沒有加入算法前電流的諧波含量較高,在電流波形的波峰和波谷處失真嚴重,波形的平滑度較低。在加入諧波抑制算法后電流波峰和波谷處的失真度有了明顯的降低,并且電流的圓滑度有了顯著提高,波形得到了明顯的改善,電流中的諧波含量有了明顯的減少。
從圖7 (a)和(b)的FFT對比分析中看出,5次和7次諧波的抑制效果非常明顯,電流的5次和7次諧波含量分別從8.33%降到0.72%和5.78%降到了0.33%,并且加入諧波抑制算法后電機的THD總量有了大幅度的減少。
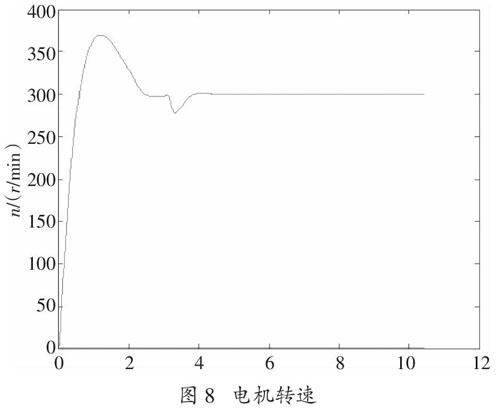
電機調速狀態如圖8所示,電機0轉矩啟動,大約在0.02秒系統達到穩定,在0.03秒加入轉矩后很快就調整到了給定轉速,調節效果良好,且跟蹤性強,最后穩定在300 r/min,電機的運行性能良好。
4 結論
針對永磁電機控制系統中存在的諧波轉矩問題,提出了一種基于諧振調節器前饋調節和注入諧波電流相結合的方法抑制轉矩脈動,得出了以下結論。
1)通過分析永磁電機的數學模型和運行狀態,推到出了永磁電機的諧波數學模型和5次、7次諧波穩態電壓。
2)根據推導出的永磁電機諧波數學模型和5次、7次諧波穩態電壓數學模型,設計了諧波電流提取算法、諧波電壓注入算法、諧波電壓補償算法和諧振調節器前饋控制環節,達到了電機穩定運行的要求。
3)該算法經仿真驗證,成功抑制了諧波電流,改善了輸出轉矩的平滑性,避免了傳統電壓補償方法電流過零點檢測不準確等問題,證明了它的可行性和有效性。
參考文獻
[1]張興,馬銘遙,余發.等,基于注入分段式諧波電流抑開關磁阻電機轉矩脈動的控制策略[J].中國電機工程學報,2017,37(0):285-291.
[2]廖勇,姚駿,楊順昌,交流勵磁發電機勵磁電源管壓降引起的諧波及其消除方法的研究[J].中國電機工程學報,2004(04):155-160.
[3] CHAN K K.A novel method for minimization of cogging torqueand torque ripple for interior permanent magnet synchronousmotor[J]. IEEE Transactions on Magnetics, 2014 .50(2):793-796.
[4] CULEC M,AYDIN M.Magnet asymmetrV in reduction of coggingtorque for integer slot axial flux permanent magnet motors[J].IetElectric Power Applications, 2014.5(8):189-198.
[5] CARUSO M. DI TOMMASO. EMMA S.et al.Analysis,characterization and minimization of IPMSMs Cogging Torquewith Different Rotor Structures[Jl. 2015 Tenth IntemationalConference on IEEE. 2015: 1-6.
[6]張岳,王鳳翔,周浩,等.極槽匹配對直驅式永磁風力發電機性能的影響[J].電工技術學報,2009(06):12-16.
[7]
LIN Y K,LAI Y S.Dead-time elimination of PWM -controlledinverter/converter without separate power sources for currentpolarity detection circuit[J]. IEEE Transactions on IndustrialElectronics, 2009, 56(6):2121-2127.
[8]
SCHELLEKENS JM,BIERBOOMSRAM,DUARTE J J.Dead-time compensation for PWM amplifiers using simple feed-forwardtechniques[J]. Electrial Machines (ICEM),XIX Internationalconferenceon IEEE, 2010: 240-245.
[9]
KERKMAN R J,LEGGATE D,SCHLEGEL D W,et al.Effects ofparasitics on the control of voltage source inverters[J]. IEEETransactions on Power Electronics, 2003, 18(1):140-150.
[10]劉國海,趙萬祥,周華偉,等,基于零序電壓諧波注入式脈寬調制的五相永磁電機直接轉矩控制[J].中國電機工程學報,2017( 05):1517-1527.
[11]
SATO Y ,ISHIZUKA T.NEZU K,et al.A new control strategy forvoltage type PWNI rectifiers to realize zero steady-state controlerror in input current[J].IEEE Trans.
on Industry Applications,1998 ,3(34):480-486.
[12] ZMOOD D N.HOLMES D G.Stationary frame current regulationof PWM inverters with zero steady -state error [J]. IEEETransactions on Power Electronics, 2003, 18(3):814-822.
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49