基于Arduino的智能滑板
2019-06-11 03:39:57蔡嘉禹林楷濤陳俊填許志明萬智萍
計算技術與自動化 2019年1期
蔡嘉禹 林楷濤 陳俊填 許志明 萬智萍

摘要:滑板運動作為極限運動的鼻祖以其超越身心極限的快感與極其自由的運動等特點,在歐美各國里成為了城市青少年最持久、最流行的時尚。但由于它使用的是傳統的人力驅動,對使用者有著體力上的要求,導致在受眾人群方面有著限制要求。研究采用電力驅動代替傳統的人力驅動,并輔以遙控調速,既能夠節省體力,也能讓受眾人群擴大,使其成為一種便攜式的交通工具,也能夠形成一種新的休閑運動方式。在分析智能滑板的運行原理和功能需求的基礎上,設計了以Arduino Pro Mini為主控芯片,將無線藍牙通信技術與電機調速驅動進行結合,實現智能數字化的控制。針對智能滑板控制系統的要求,采用PWM直流斬波調壓方式實現智能滑板的自動巡航、加速、減速、剎車。本系統所用核心芯片為Arduino Pro Mini,以及HC05藍牙模塊、蜂鳴器模塊、電調、電機等許多器件。該滑板具有智能自動化程度高、成本低、重量小、可靠性強等優點。
關鍵詞:智能滑板;藍牙無線控制;Android;無刷電機;
中圖分類號:TN2
文獻標識碼:A
Arduino的出現,使硬件開發更為便捷簡單,為物聯網打下基礎,極大的推動了物聯網的發展,也使市面上出現了更多的智能硬件產品,人們對智能生活的體驗也得到了極大的提升。
科技的進步使人們的生活發生了巨大變化,高速發展的科技使得人類生活愈加便捷。在交通工具發達的今天,汽車、地鐵、高鐵是大多數人們出行所選擇的交通工具。而對于短途交通,則存在在公交車繞路遠,出租車價格高昂,共享單車投放不足等問題,這便是“最后三公里”的問題。基于以上問題,便攜式電動交通工具作用便日益凸顯。研究是否能用智能滑板進行代步,用來改善傳統的代步工具所存在的滑行費體力、不易操作上手、不易攜帶重物等問題。
智能滑板可以提高交通出行效率,節約了出行時間。智能滑板在基于Android操作系統的簡易可操作性和開源性基礎上,利用藍牙無線技術控制滑板的運動狀態。藍牙作為一種抗干擾能力強、功耗低的無線通信技術,相較于其他無線控制技術,如紅外、射頻等應用范圍更廣,在中短距離范圍控制中具有較大的優勢。在市面上有很多智能硬件產品是使用WiFi進行連接的,而WiFi存在著信道干擾的問題,如果進入一個WiFi信號密集的區域,易出現對智能滑板失控現象,在物理層,藍牙與WiFi使用的協議有差別,藍牙使用跳頻(FHSS),WIFI使用直列展頻技術(DSSS)。使用跳頻技術能夠更好抗干擾。相比WiFi模塊而言藍牙價格更加低廉,可以做到控制設計成本,使整體造價下降一個檔次。因此在探索智能化、低成本的智能滑板的可行性方案上開發出基于Ardunio,利用傳感器技術開發出使用藍牙無線通訊,使用APP進行控制的智能滑板。
1 主控芯片
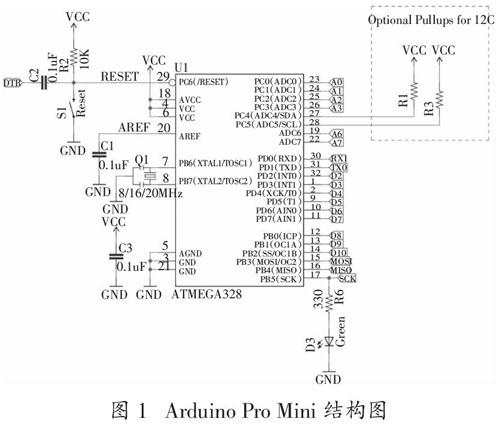
Arduino Pro Mini芯片的引腳如圖1所示,Ar-duino Pro Mini具有微小,簡潔和強抗能力的特點。芯片內部集成針對電機控制和電子調速器的PWM,有6路模擬輸入,轉換速度響應快速。Ar-duino Pro mini還擁有以下特點:
(l)Arduino Pro Mini為Arduino Mini的半定制版本,與Mini版本的管腳完美兼容。
(2)共有14路數字輸入/輸出口,6路為PWM輸出,6路為模擬輸出,還有著晶體諧振和復位按鈕。
(3)為了縮小體積故不提供USB接口,需要使用ATmega8U2 USB轉串口模塊與開發端進行連接。
(4)處理器核心為ATmega168,是一款高性能低功耗的8位AVR微處理器。
2 HC-05模塊
HC05藍牙模塊為連接智能滑板與Android手機之間的重要數據傳輸通道。當HC05藍牙模塊接收來自Android手機的控制信號之后,通過串口通信將數據傳輸到Arduino Pro Mini單片機上,單片機通過解析控制命令后,調用相應的驅動程序。所用的藍牙協議為2.O+EDR,圖2為藍牙軟件協議棧堆的數據傳輸過程,其中主機1為Android手機上的藍牙模塊,主機2為在單片機上的HC05藍牙模塊。通過這個流程圖,可以更好地理解藍牙的數據傳輸過程。
使用的HC-05藍牙模塊可以與單片機進行全雙工通信。這樣便可以實現Android手機與Ar-duino Pro Mini單片機之間的相互聯系,數據流可以相互反饋,在手機端可以觀察單片機上的實時狀態,如電壓、電量以及速度等數據。
藍牙傳輸數據流程如圖3所示。
在進行首次配對的過程中,將單片機與藍牙模塊通過引腳連接起來,TXD接RXD,RXD接TXD,pin_2接STATE。使用Usb_ttl模塊進行連接(將EN引腳接至Usb_ttl模塊的VCC引腳上)進入AT模式,之后使用sscom2串口調試助手進行設置配對即可。圖4為HC05藍牙模塊原理圖。
3 電子調速器
電子調速器,簡稱電調,是控制電機轉速的控制裝置。通過利用無刷電機內置振蕩器產生的震蕩信號與電調構成脈寬調制比較器,產生PWM脈寬信號加載在開關上,調節輸出電壓。
對于控制PWM輸出,PWM頻率在15 kHz左右,對于Arduino Pro Mini單片機的時鐘頻率,屬于可掌控范圍,占空比在于3%到100%之間,調速電壓跟占空比的對應關系如表1。
定義啟動調速電壓為:2.6-4.5 V,加速時間為T1=3 s,減速時間為T2= 0.5 s。啟動加速時間設定為3s,可以避免啟動時帶動人體前傾的危險情況發生。
調速電壓<2.5 V定義為剎車,鎖停PWM的輸出,使PWM=I。延時0.1 ms之后,解開PWM的輸出,使PWM=O,再次延時0.1 ms之后,鎖停PWM輸出,如此反復,直至剎車信號消失(點剎法)。圖5為電機驅動控制模塊原理圖。
當調速電壓穩定為一個峰值的時候(該峰值區間在2.6-4.5 V之間),智能滑板進行勻速巡航。滑板將以一個穩定的速度進行滑行。
當總電壓低于26 V時,開始預警,觸發蜂鳴器并使LED進入閃爍狀態,當總電壓低于23.6 V時,蜂鳴器急促報警,LED進入常亮狀態,延時10 s后封鎖PWM輸出。當總電壓回升至26 V以上時,解開PWM封鎖。
4 電源設計
電源作為系統的供能部分,是驅動的核心動力源,也是整個系統設計的基礎部分,故此電源電路的設計在文中占據著較高的地位,值得單獨作為一個小節。本項目中主要的模塊有Arduino Pro Mini單片機、HC05藍牙模塊、蜂鳴器模塊、Nokia5110液晶屏、Sllion 2-6 s電子調速器、N5065有感無刷電機。Sllion 2-6 s電子調速器、N5065有感無刷電機所需電壓較大,故使用外部獨立電源,使用2-6S鋰電池,該電池滿載電壓為27.2 V,工作電壓為23.6 V。蜂鳴器模塊工作電壓在3~12 V之間,Nokia5110液晶屏與HC05藍牙模塊工作電壓為3.3 V電壓,單片機的工作電壓設計為SV,此核心設計為單片機之間的電路。如圖6所示是單片機的供電部分的電路設計,穩定電壓電路由兩部分組成:右側電路輸出為3.3 V,供電給液晶屏與藍牙模塊,左側輸出電路為SV,供電單片機與蜂鳴器。
5 系統測試
5.1 電路測試
在裝置啟動之前需要對電路進行測試,測試部分分為兩塊,晶振頻率測試與電壓測試。晶振的異常會引起電路出現異常。關于晶振頻率的測試可以通過示波器進行測試,將示波器探頭連接在時鐘振蕩電路的兩極,調節示波器顯示波形。測試結果如圖7所示為正弦波波形,為晶振的正常波形。
通過萬用表對電路中各節點的電流電壓的測試,計算上實際損耗,系統電路測試正常,各部分模塊電壓沒有異常狀況。單片機電壓的檢測如圖8所示:
5.2 藍牙測試
藍牙作為一種抗干擾能力強、功耗低的無線技術,也有著它的局限性。低功率和高頻率限制了其應用范圍,故對本文的通信質量進行測試。
無線藍牙能在約9m的范圍(無障礙物)內實現有效控制,連接通信方面良好,不會突然斷開造成操作者對滑板失去控制。但是在有障礙物存在的環境下,如0.5 m厚水泥墻阻隔,控制信號出現斷斷續續的狀況。
在抗干擾性的測試方面,我們在智能滑板周圍部署了10個無線WIFI的AP連接點,5個藍牙配對部件(與系統設計使用同一頻段),占用了部分信道。對于WiFi的干擾來說,Android手機對于智能滑板的遙控范圍縮短至7m左右,對于同頻段的藍牙信號干擾,Android手機對智能滑板的控制范圍縮短至6.5 m,當15個干擾源一起部署的時候,控制范圍縮短到Sm,且控制力度有跳頻現象,每隔20 s會出現丟失1 ms的控制時間(這是在4m的控制范圍內)。在2m范圍內進行控制沒有出現這種現象。
對于本文而言,控制設備與滑板距離在1.5 m以內,有效保障控制范圍與連接的穩定性。
5.3 軟件測試
在系統的運行中,假如程序有著BUG發出錯誤的指令,會讓整個系統陷入錯亂的狀態,所以在燒錄程序之前要對程序進行BUG測試。項目所使用的Arduino IDE是程序測試的主要角色,對于BUG與語法錯誤都會有標注,如果有錯誤則無法編譯通過。在調試成功后才可將程序燒錄進單片機中。圖9為Arduino IDE的程序測試圖。
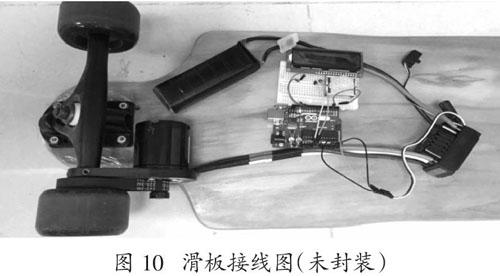
5.4 滑板測試
對于智能滑板的承重量與最大行駛速度需要進行實際測試。如圖10為滑板接線圖,還未進行封裝。
N5065有感無刷電機的KV值為400,2-6S鋰電池平時工作電壓為23.6 V,滿電電壓為27.2 V)。
則滑板的電機轉速計算公式為(1):
N= KV×U
(1)
故此N5065有感無刷電機的理論轉速在于9440 rpm~10880 rpm之間。但是常態轉速應為9440 rpm。
同步傳送帶的皮帶輪與電機齒輪之間的比例約為3:1.電機負載為80%。故此理論最大時速為:
9440rpm*80%*1/3*15cm*60min/lOOOm=22.656km/h
經過實際測試,載重為60 kg的成年人,滑板的實際運行速度為21 km/h。當實際載重達到85 kg時,電機負載過大,行動緩慢。因此極限載重應為85 kg,超出這個范圍應該更換電池型號加大電壓。爬坡的最大坡度為14%,續航達到10 km,所需充電時長為40 min,具體如表2。
7 結語
最后三公里的交通問題,是當前公共交通的短板,由于此智能滑板的便攜性,可以彌補此最后三公里交通的短板,如果能夠批量規范生產,保證智能滑板的安全性與質量,加上互聯網思維的影響,智能滑板可以成為這個時代的主流交通工具。
參考文獻
[1]曹靜.城市快速路交通擁堵特征與實時排隊長度確定方法研究[D].西安:長安大學,2016.
[2] 曾穎,基于WiFi的PROFINET網絡接入安全技術研究與實現[D].長春:吉林大學,2017.
[3]馬沙沙.基于Arduino&Android的煙霧報警系統[D].西安:長安大學,2017.
[4]崔曉夢,基于Arduino的物聯網接入器的研究與實現[D].北京工業大學,2015.
[5]馬曉爽,石征錦.基于Simulink的無刷直流電機雙閉環調速系統仿真研究[J].制造業自動化,2016,(07):82-88.
[6]孟訪,基于PIC單片機的無刷直流電機控制系統研究[D]灘南:安徽理工大學,2017.
[7]胡致強,基于PWM加移相控制的雙Boost雙向DC-DC變換器研究[D]武漢:華中科技大學,2016.
[8]趙方亮,智能家居中的嵌入式Linux移植與驅動程序設計[D].燕山大學,2016.
[9]朱天順.基于FPCA的無刷直流電機調速系統設計[D].南寧:廣西師范大學,2017.
[10]張靜.基于安卓藍牙的遠距離通信系統設計與實現[D].大連:大連海事大學,2017.
[11] SU Z K,WANC H L NA L.Anti-disturbance rapid vibrationsuppression of the flexible aerial refueling hose[J]. MechanicalSystems and Signal Processing, 2018, 104: 87-105.