基于有限集模型預測的電機模擬器故障電流跟蹤方法
2019-06-13 09:29:56彭濤劉博楊超秦瑞陽春華
中南大學學報(自然科學版) 2019年5期
彭濤,劉博,楊超,秦瑞,陽春華
?
基于有限集模型預測的電機模擬器故障電流跟蹤方法
彭濤,劉博,楊超,秦瑞,陽春華
(軌道交通節能控制與安全監測湖南省重點實驗室,中南大學 自動化學院,湖南 長沙,410083)
電機故障情況下電機模擬器跟蹤定子電流動態響應慢、精度低,為了解決這一問題,提出一種基于有限集模型預測的故障電流跟蹤方法。首先,構建基于信號調理的故障注入器,根據給定指令設定預測控制器的參考電流信號;然后,建立電機模擬器負載電流預測模型,在每一個采樣周期內,計算所有開關狀態下負載電流的預測值;最后,構建評價函數,計算每一個扇區對應的評價函數值,選取最小評價函數值對應的扇區內的開關狀態作為電機模擬器下一個采樣周期的開關狀態。研究結果表明:本文提出的方法可以有效地跟蹤電機模擬器故障電流,與傳統PI調節相比,動態響應速度更快,跟蹤精度更高。
電機模擬器;故障注入;有限集模型預測;電流跟蹤
電機作為主要動力設備,廣泛應用于工農業生產、國防、科技及日常生活等各個領域。當電機發生故障時,不僅會影響自身的可靠性,而且會嚴重干擾整個生產系統的正常工作,甚至會危及人身安全,因此,電機的故障問題一直是人們關注的焦點[1?3]。在傳統的測試平臺中,研究電機故障往往需要額外改造或損傷實物電機[4],不易于進行重復性實驗,因此,人們對電機故障特性的分析研究更多關注電機定子電流特 性[5]。電機模擬器由SLATER等提出[6],是一種通過對變頻器端口電流的控制使其具有與實際電機相同端口電流特性的裝置[7]。文獻[8]中,基于旋轉坐標系建立異步電機的動態數學模型,實現電機模型電流的實時計算和電機模擬器負載電流的跟蹤控制。文獻[9]中,采用LCL結構作為電機模擬器負載,在一定程度上提高了負載電流跟蹤的準確性。文獻[10]采用線性逆變器結構替代傳統變頻器,改善電機模擬器負載電流的動態性能。上述文獻中的電機模擬器都采用PI調節器作為電流閉環跟蹤控制器,且都只模擬電機正常運行情況下電機定子電流特性,并未研究電機發生故障導致電流突變后的跟蹤性能。近年來,有限集模型預測(FSMP)作為一種電流閉環優化控制方法備受關注[11?15],通過電機和逆變器的離散時間模型預測下1個周期的電流響應,拓展電流環帶寬,有效提高電流的動態性能。本文提出基于FSMP的電機模擬器故障電流跟蹤方法,采用信號調理的方式構建故障注入器,由給定指令設定參考電流信號;通過使用電機模擬器負載電流預測模型計算下1個采樣周期的電流預測值;根據電機模型定子參考電流與負載電流的預測值構建評價函數,選擇最小評價函數值對應的扇區內的開關狀態控制負載模擬器生成負載電流,實現負載電流對電機模型定子參考電流的快速準確跟蹤;最后,通過搭建半實物仿真平臺,實驗驗證所提出的方法。
1 電機模擬器拓撲結構
電機模擬器拓撲結構如圖1所示,電機模擬器包括負載模擬器、電機模型、故障注入器和預測控制器4個模塊。負載模擬器由開關矩陣和耦合負載網絡組成,開關矩陣采用三相兩電平變頻器,用于生成作用于耦合負載網絡的交流電動勢;耦合負載網絡包含三相阻感負載,每相由1個耦合電阻和1個耦合電感組成,用于產生電機模擬器的負載電流。電機模型采用鼠籠式三相異步電機模型,在端口電壓作用下產生三相定子電流。故障注入器根據給定指令,調理三相定子電流信號和特定故障信號,生成正常/故障狀態下的參考電流信號。預測控制器通過預測模型和評價函數,產生作用于開關矩陣的控制信號。
2 基于FSMP的電流跟蹤方法
2.1 設定參考電流信號
圖1中,作為電機模擬器中給定值的設定裝置,故障注入器生成提供電機正常或故障運行狀態下的定子參考電流信號。
采用信號調理的方式[16]建立故障注入器模型:
式中:為電機模型在端口電壓作用下產生的三相定子電流,={i,i,i};為電機特定故障信號;1,2和3分別為電機模型三相定子電流與電機特定故障電流經過疊加、相乘和直取操作后的故障場景電流;為故障注入器輸出的參考電流,從,1,2和3中選擇。跟蹤正常電流時,參考電流設定為=;跟蹤故障電流時,參考電流設定為=1或2或3。
考慮轉子斷條故障、定子匝間短路故障、氣隙偏心故障、端環斷裂故障、軸承故障等常見電機故障[16],將特定故障信號表征為[17]:
=(,1,)=1cos(2πf1+1)+2cos(2πf2+2) (2)
式中:為故障嚴重程度;1為定子電流基波頻率;為電機轉差率;1和2為相應邊頻分量的幅值,可由和基頻幅值得到;f1和f2為特定故障類型相應邊頻分量的故障特征頻率,與基頻1和轉差率有關;1和2為相應邊頻分量的相位角,可任意取值。
2.2 構建電流預測模型
負載模擬器中開關矩陣相電壓方程為

負載模擬器狀態方程為


對式(3)進行Clark變換,得到坐標系下電機模擬器負載電流的預測模型:

2.3 構建評價函數
定義坐標系下,電機模擬器負載電流預測值與電機模型定子電流參考值之差的絕對值平方和為殘差函數:

式中:ref,ref表示參考電流信號iref,iref和iref在坐標系下的值。
開關矩陣電壓矢量對應的殘差函數e為
e=e+e(8)
式中:e和e分別為開關矩陣電壓矢量在坐標系下對應的殘差,其中,=0,1,2,…,7。



計算所有扇區對應的評價函數值,選取最小評價函數值對應的扇區內的開關狀態作為開關矩陣下一時刻的開關狀態:

最小評價函數值對應的扇區內的開關狀態作用于開關矩陣的具體開關方式如圖2所示。

圖2 電機模擬器開關方式圖
3 電機模擬器運行原理

4 實驗及結果
為驗證本文提出方法的跟蹤性能,搭建基于dSPACE的半實物仿真平臺,該平臺由實物控制器、實時仿真器和上位機3個部分構成。實物控制器采用具有高速處理能力及豐富接口資源的TMS320F28335控制芯片,采集回饋信號用以進行控制策略解算,產生PWM控制信號,實現主電路變流器的實時控制。實時仿真器包括DS1007CPU板卡和DS5203FPGA板卡,DS1007CPU板卡用于預測控制器和故障注入器的實時解算,DS5203FPGA板卡用于電機模型和負載模擬器模型的實時仿真, 并與實物控制器進行實時信號交互。上位機通過實時仿真軟件對模型采集實時數據,并實時監控觀測點運行狀態。
本實驗采用MT205型三相異步電機,系統實驗參數設置如表1所示。為減小負載模擬器電流諧波,需要增大耦合電感,但是過大的電感又會導致系統動態性能下降。為保證系統動態性能良好,負載模擬器負載電感應不超過電機模型漏感。

圖3 電機模擬器運行原理框圖
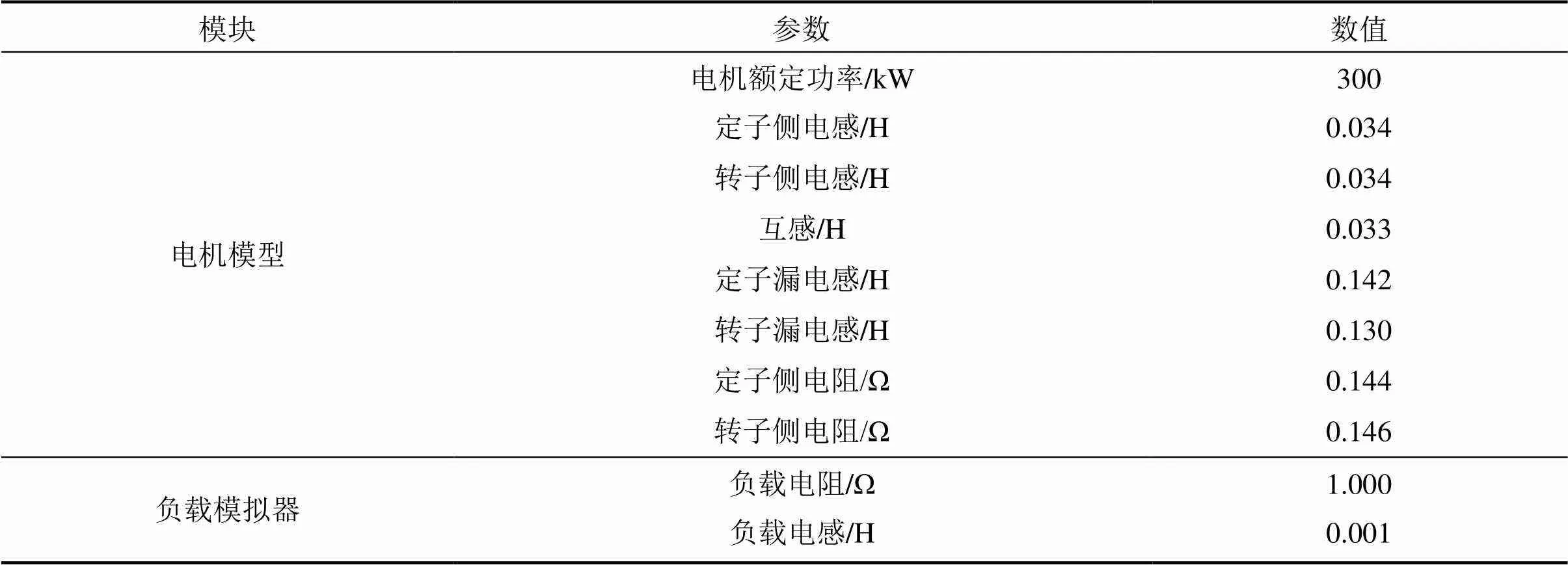
表1 電機模擬器故障電流跟蹤系統實驗參數
本文分別采用基于PI調節和基于FSMP控制的電機模擬器電流跟蹤方法,跟蹤電機正常和故障電流,比較分析2種方法的效果。
在電機正常運行狀態下,比較分別采用PI調節和FSMP控制時,電機模擬器負載電流對電機模型定子參考電流的跟蹤效果。采用PI調節和FSMP控制時A相電流跟蹤的仿真結果如圖4所示,在FSMP控制下,負載電流(FSMP)可以快速地跟隨參考電流ref的變化,然而,在PI調節下,負載電流(PI)對參考電流的跟蹤相對滯后。
采用PI調節時三相電流跟蹤的仿真結果如圖5(a) 所示。從圖5(a)可見:電流幅值偏差(PI)約為10 A,跟蹤精度(實際電流(PI)幅值/參考電流ref幅值)為90.57%;采用FSMP控制三相電流跟蹤的仿真結果如圖5(b)所示。從圖5(b)可見:電流幅值偏差(FSMP)約為5 A,電流跟蹤精度(負載電流(FSMP)幅值/參考電流ref幅值)為95.28%。這說明與PI調節相比,采用FSMP控制時的電流動態響應速度更快,跟蹤精度 更高。

圖4 電機正常運行狀態下,電機模擬器A相負載電流跟蹤結果波形圖

圖5 電機正常運行狀態下,電機模擬器三相負載電流跟蹤結果波形圖
在電機轉子斷條故障狀態下,比較分別采用PI調節和FSMP控制時,電機模擬器負載電流對電機模型定子參考電流的跟蹤效果。設置故障程度=0.2,基波頻率1=131.118 Hz,轉差率=0.038,采用PI調節和FSMP控制時A相電流跟蹤的仿真結果如圖6所示,在FSMP控制下,負載電流(FSMP)可以快速地跟隨參考電流ref的變化,然而在PI調節下,負載電流ref對參考電流的跟蹤相對滯后。
采用PI調節時三相電流跟蹤的仿真結果如圖7(a) 所示。從圖7(a)可見:電流幅值偏差(PI)約為12 A,跟蹤精度(負載電流(PI)/參考電流ref幅值)為88.68%;采用FSMP控制時三相電流跟蹤的仿真結果如圖7(b)所示。從圖7(b)可見:電流幅值偏差(FSMP)約為6A,電流跟蹤精度(負載電流(FSMP)/參考電流ref幅值)為94.34%。這說明在電機故障狀態下,與PI調節相比,采用FSMP控制時電流的跟蹤依然保持更快地動態響應和更高地跟蹤精度。

圖6 電機轉子斷條故障狀態下,電機模擬器A相電流跟蹤波形圖

圖7 電機轉子斷條故障狀態下,電機模擬器三相電流跟蹤結果波形圖
電機轉子斷條故障狀態下,電機模擬器A相電流頻譜結果如圖8所示。從圖8可見:基頻附近存在與f=(1±2)1對應的故障邊頻分量,符合斷條故障理論分析[19];A相負載電流與A相參考電流頻率分布狀態基本一致,二者的故障邊頻分量相同,從而驗證在電機轉子斷條故障狀態下,電機模擬器依然可以真實、準確地模擬電機模型定子電流的工作狀態。

圖8 電機轉子斷條故障狀態下,電機模擬器A相電流頻譜分析圖
5 結論
1) 基于電機模擬器可以等效為實際電機,提出一種基于FSMP的電機模擬器故障電流跟蹤方法。
2) 分析電機的故障表現及特性,采用信號調理的方式構建故障注入器,根據給定指令獲得常見電機故障狀態下的參考電流信號。
3) 搭建半實物仿真平臺,比較在正常和故障狀態下電機模擬器負載電流對電機模型定子電流的跟蹤效果。與傳統PI調節相比,本文所提方法動態響應速度更快,跟蹤精度更高。
[1] GU B G, SUNG P J, KONG T S, et al. Off-line inter-turn fault diagnosis method forinduction motors by impedance analysis[J]. IEEETransactions on Industrial Electronics, 2018,65(7): 5913?5920.
[2] 尹進田, 謝永芳, 陽春華, 等. 基于RVMD的牽引電機轉子初期斷條故障監測[J]. 控制與決策, 2018, 33(3): 497?502.YIN Jintian, XIE Yongfang, YANG Chunhua, et al. Monitoring of incipient rotor bars broken fault in traction motors based on RVMD method[J].Control and Decision, 2018, 33(3): 497?502.
[3] XIE Ying, CHEN Peng, LI Fei, et al. Electromagnetic forces signature and vibration characteristic for diagnosis broken bars in squirrel cage induction motors[J]. Mechanical Systems and Signal Processing, 2019, 123: 554?572.
[4] 宋鵬先, 李耀華, 王平, 等. 交流電機端口特性的數字化實現方法[J]. 電工技術學報, 2015, 30(14): 184?192.SONG Pengxian, LI Yaohua, WANG Ping, et al. The digital realization method of AC motor simulator[J]. Transactions of China Electrotechnical Society, 2015, 30(14): 184?192.
[5] PONS-LLINARES J, ANTONINO-DAVIU J A, RIERA-GUASP M, et al.Advanced induction motor rotor fault diagnosis viacontinuous and discrete time–frequency tools[J].IEEE Transactions on Industrial Electronics, 2015,62(3):1791?1802.
[6] SLATER H J, ATKINSON D J, JACK A G. Real-time emulationfor power equipment development. Part 2: the virtualmachine [J]. IEE Proceedings-Electric Power Applications,1998, 145(3): 153?158.
[7] RAO Y S, CHANDORKAR M. Rapid prototyping tool forelectrical load emulation using power electronicconverters[C]// Industrial Electronics & Applications, Kuala Lumpur Malaysia IEEE, 2009: 106?111.
[8] JACK A G, ATKINSON D J, SLATER H J. Real-time emulationfor power equipment development. Part 1: real-timesimulation[J]. IEE Proceedings-Electric PowerApplications, 1998, 145(2): 92?97.
[9] RAO Y S, CHANDORKAR M C. Real-time electrical loademulator using optimal feedback control technique[J].IEEE Transactions on Industrial Electronics, 2010,57(4): 1217?1225.
[10] GRUBIC S, AMLANG B, SCHUMACHER W, et al. Ahigh-performance electronic hardware-in-the-loopdrive–load simulation using a linear inverter(LinVerter)[J]. IEEE Transactions on Industrial Electronics,2010, 57(4): 1208?1216.
[11] KUMAR K V P, KUMAR T V. Predictive torque control ofopen-end winding induction motor drive fed with multilevel inversion using two two-level inverters[J]. IETElectric Power Applications, 2018, 12(1): 54?62.
[12] 陳增強, 吳瑕, 孫明瑋, 等. 時滯系統的自抗擾廣義預測控制的性能分析[J]. 中南大學學報(自然科學版), 2018, 49(8): 1960?1970.CHEN Zengqiang, WU Xia, SUN Mingwei, et al. Performance analysis of active disturbance rejection generalized predictive control on time-delay systems[J]. Journal of Central South University(Science and Technology), 2018, 49(8): 1960?1970.
[13] DAN Hanbing, ZHU Qi, PENG Tao, et al. Preselection algorithm basedon predictive control for direct matrix converter [J]. IETElectric Power Applications, 2017, 11(5): 768?775.
[14] ELSISI M, SOLIMAN M, ABOELELA M A S, et al. Modelpredictive control of plug-in hybrid electric vehicles forfrequency regulation in a smart grid[J]. IET GenerationTransmission & Distribution, 2017, 11(16): 3974?3983.
[15] 宋文勝, 蔣蔚, 劉碧, 等. 單相級聯H橋整流器簡化模型預測電流控制[J]. 中國電機工程學報, 2019, 39(4): 1127?1138. SONG Wensheng, JIANG Wei, LIU Bi, et al. Single-phase cascaded H-bridge rectifiers simplified model predictive current control[J]. Proceedings of the CSEE, 2019, 39(4): 1127?1138.
[16] 鄭大勇, 張品佳. 交流電機定子絕緣故障診斷與在線監測技術綜述[J]. 中國電機工程學報, 2019, 39(2): 395?406. ZHENG Dayong, ZHANG Pinjia. A review of fault diagnosis and online condition monitoring of stator insulation in AC electrical machine[J]. Proceedings of the CSEE, 2019, 39(2):395?406.
[17] YANG Chunhua, YANG Chao, PENG Tao, et al. A fault- injection strategyfor traction drive control systems[J]. IEEE Transactionson Industrial Electronics, 2017, 64(7): 5719?5727.
[18] BHATTACHARYA S, SHARMA S K, MASCARELLA D, et al.Sub-fundamental cycle switching frequency variationfor switching losses reduction of a two-level invertertraction drive[J]. IEEE Transactions on Transportation Electrification, 2017, 3(3): 646?655.
[19] SIZOV G Y, SAYED-AHMED A, YEH C C, et al. Analysis anddiagnostics of adjacent and nonadjacentbroken rotor-bar faults in squirrel-cage inductionmachines[J]. IEEE Transactions on Industrial Electronics,2009, 56(11): 4627?4641.
Fault current tracking method of motor simulator based on finite set model prediction
PENG Tao, LIU Bo, YANG Chao, QIN Rui, YANG Chunhua
(School of Automation, Hunan Provincial Key Laboratory of Energy Saving Control and Safety Monitoring for Rail Transportation, Central South University, Changsha, China 410083)
Aiming at the problem of slow dynamic response and low accuracy during the process of tracking motor fault stator currents by motor simulator, a fault current tracking method based on finite set model prediction(FSMP) was proposed. First, the fault injector based on signal conditioning was constructed, and the reference current signal of the predictive controller was set according to the given instruction. Then, the load current prediction model of motor simulator was set up, and the prediction value of the load current in all switching states was calculated in each sampling period. Finally, the evaluation function was constructed, and the corresponding evaluation function value of each sector was calculated. The switch state in the sector corresponding to the minimum evaluation was used as the switch state of the next sampling period of the motor simulator. The research results show that fault current of motor simulator can be effectively tracked by the proposed method. Compared with the traditional PI regulation, the dynamic response of proposed method is faster and the tracking precision is higher.
motor simulator; fault injection; finite set model prediction(FSMP); current tracking
MT343+.3
A
1672?7207(2019)05?1098?07
10.11817/j.issn.1672?7207.2019.05.012
2018?08?20;
2018?10?23
國家自然科學基金重大項目(61490702); 國家自然科學基金面上項目(61773407); 中南大學軌道交通節能控制與安全監測湖南省重點實驗室資助項目(2017TP1002); 教育部聯合基金項目(6141A02022110); 中南大學中央高校基本科研業務費專項資金資助項目(2017zzts469) (Project(61490702) supported by the Major Program of the National Natural Science Foundation of China; Project(61773407) supported by the General Program of the National Natural Science Foundation of China; Project(2017TP1002) supported by the Hunan Provincial Key Laboratory of Energy Saving Control and Safety Monitoring for Rail Transportation; Project(6141A02022110) supported by the Program of the Joint Foundation of the Chinese Ministry of Education; Project(2017zzts469) supported by the Fundamental Research of Funds for the central Universities of Central South University)
楊超,博士研究生,從事復雜系統、設備的故障診斷研究;E-mail: chaoyang@csu.edu.cn
(編輯 秦明陽)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25