基于Arduino的汽車智能化系統(tǒng)實(shí)訓(xùn)平臺系統(tǒng)設(shè)計(jì)
2019-06-15 01:01:22謝智陽陳紀(jì)欽紀(jì)霖菁陳勝利
數(shù)字技術(shù)與應(yīng)用 2019年3期
關(guān)鍵詞:智能化
謝智陽 陳紀(jì)欽 紀(jì)霖菁 陳勝利
摘要:汽車技術(shù)趨向于自動化、智能化,汽車的內(nèi)部電子線路和傳感器均由行車電腦進(jìn)行控制,但現(xiàn)有汽車教學(xué)設(shè)備功能單一、操作繁瑣且跟不上汽車智能技術(shù)的發(fā)展,無法滿足教學(xué)需求。為解決現(xiàn)有汽車教學(xué)設(shè)備的不足之處,以開源硬件Arduino為控制核心,設(shè)計(jì)了一款汽車智能化系統(tǒng)實(shí)驗(yàn)平臺,經(jīng)實(shí)驗(yàn)后,該款實(shí)驗(yàn)平臺功能齊全、操作簡單且具備實(shí)驗(yàn)數(shù)據(jù)可視化等功能,可在高等職業(yè)院校同類專業(yè)中推廣使用。
關(guān)鍵詞:Arduino;智能化;教學(xué)設(shè)備;傳感器
中圖分類號:TP273 文獻(xiàn)標(biāo)識碼:A 文章編號:1007-9416(2019)03-0147-03
0 引言
車聯(lián)網(wǎng)建立在物聯(lián)網(wǎng)的基礎(chǔ)進(jìn)行開發(fā)的一種大型汽車服務(wù)網(wǎng)絡(luò),將做到車與車,人與車,車與各類網(wǎng)絡(luò)基站(網(wǎng)絡(luò)服務(wù)器)的互聯(lián)互通做到信息共享[1]。
物聯(lián)網(wǎng)是將物品與互聯(lián)網(wǎng)鏈接進(jìn)行管理,通過采用射頻識別(RFID)傳感器設(shè)備檢測,將信息反饋于網(wǎng)絡(luò)來實(shí)現(xiàn)智能識別、定位、監(jiān)控和管理等。據(jù)調(diào)查市面已出現(xiàn)相應(yīng)RFID實(shí)訓(xùn)實(shí)驗(yàn)控制板,但功能單一且成本高昂。
在2014年6月湖北汽車工業(yè)學(xué)院申請RFID綜合實(shí)訓(xùn)箱專利[2]中,對現(xiàn)有RFID控制硬件實(shí)驗(yàn)板上單一的功能進(jìn)行統(tǒng)一,已取得相應(yīng)的實(shí)驗(yàn)成果。但初學(xué)者無法很好理解內(nèi)部的機(jī)械運(yùn)作控制原理且電子線路復(fù)雜后期保養(yǎng)維修的成本較重。本項(xiàng)目將針對這一問題將設(shè)計(jì)一款運(yùn)用以Arduino單片機(jī)為控制核心,搭建各類傳感器實(shí)訓(xùn)實(shí)驗(yàn)平臺模擬電子機(jī)械控制原理,且成品成本低廉,維修簡便,可根據(jù)時代發(fā)展和教學(xué)需求進(jìn)行更新。
1 硬件設(shè)計(jì)方案
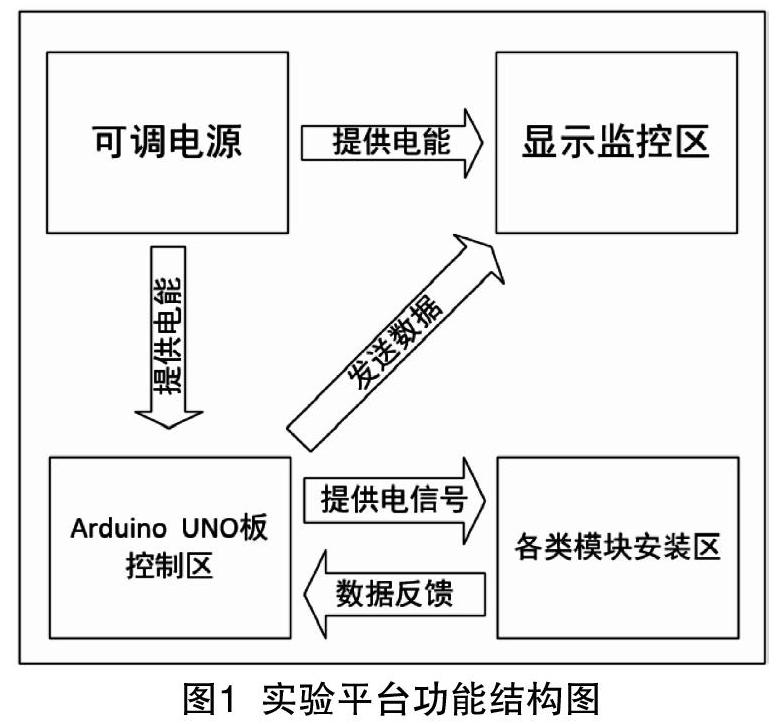
實(shí)訓(xùn)箱內(nèi)部板塊劃分為3個區(qū)域:顯示監(jiān)控區(qū)、Arduino MCU處理器放置區(qū)、各類模塊安裝區(qū),如圖1所示。
1.1 Arduino控制區(qū)
本實(shí)驗(yàn)平臺使用Arduino UNO R3單片機(jī)代替汽車車載電腦(MCU或ECU)來實(shí)現(xiàn)對各類傳感器進(jìn)行信號采集。Arduino是一款開源電子平臺,包含硬件(各種型號的Arduino模塊)和軟件編輯器(Arduino IDE),其功能齊全,編程簡單,易于上手。利用Arduino在測控和檢測領(lǐng)域應(yīng)用更為廣泛,而且軟件系統(tǒng)是完全開源,可在網(wǎng)絡(luò)上直接找到眾多相應(yīng)的開源示例代碼。使用Arduino IDE軟件編寫相應(yīng)的模塊程序燒寫入Arduino UNO R3板(下列簡稱為UNO板)中,利用程序控制各類傳感器工作,收集各類模塊板上的數(shù)據(jù)反饋到顯示監(jiān)控區(qū)進(jìn)行顯示。
1.2 各類傳感器模塊安裝區(qū)
各類模塊安裝區(qū)制作成可拆卸的形式,可將各類傳感器模塊固定在此區(qū)域中進(jìn)行實(shí)驗(yàn),做完一個模塊的實(shí)驗(yàn)可更換成下一個實(shí)驗(yàn)?zāi)K進(jìn)行實(shí)驗(yàn),大大的節(jié)約實(shí)驗(yàn)時間,還利用Processing圖形軟件,將實(shí)驗(yàn)過程轉(zhuǎn)化成圖片投屏演示與實(shí)物硬件演示進(jìn)行同步互動,初學(xué)者更能生動形象的了解其工作原理。
Processing是由美國Casey Reas與Ben Fry創(chuàng)造的編程語言,以互動圖形的形式,來學(xué)習(xí)編程的。使用者可讀取Ardunio的傳感器數(shù)據(jù)并且把它顯示在屏幕上,這款軟件被廣泛應(yīng)用于數(shù)字多媒體、工業(yè)設(shè)計(jì)、計(jì)算機(jī)編程教育等領(lǐng)域中[3-4]。
傳感器分模塊搭建的優(yōu)點(diǎn):維修簡便,維修費(fèi)低廉,損壞時可更換配件或整模塊更換,可根據(jù)教學(xué)需求進(jìn)行內(nèi)部模塊開發(fā)更新。由于實(shí)訓(xùn)箱內(nèi)部配置的傳感器較多,以現(xiàn)代汽車上最為常見的溫濕度傳感器、超聲波模塊和輪速傳感器進(jìn)行舉例說明。
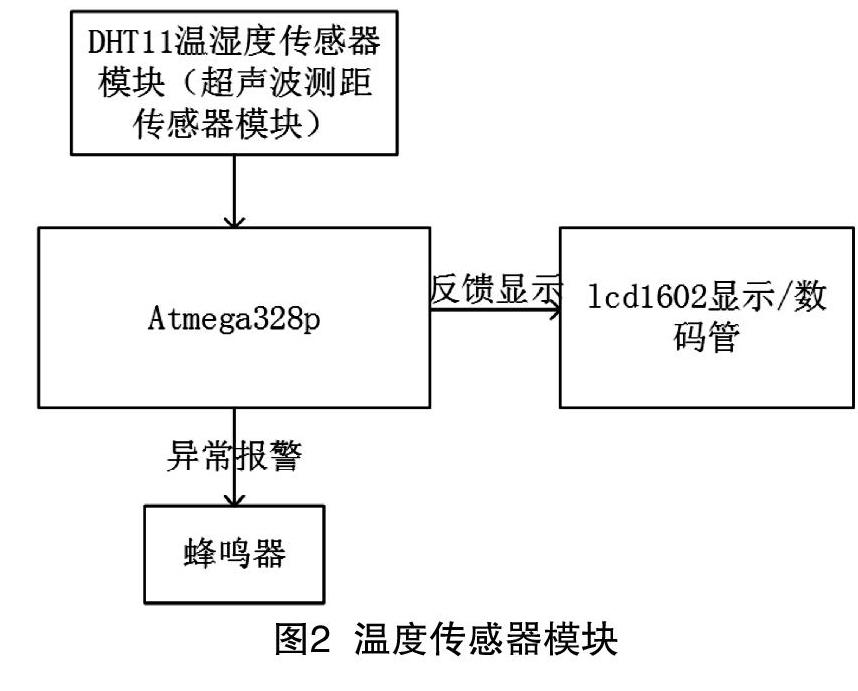
1.2.1 溫濕度傳感器模塊
如圖2 所示,在本模塊中使用到的是DHT11溫濕度傳感器。該傳感器包括一個電阻式測濕元件和一個NTC測溫元件,通過簡單的電路連接控制采集本地濕度和溫度。溫濕度傳感器模塊中還添加了蜂鳴器和LCD1602液晶顯示屏,能有效的對DHT11溫濕度傳感器檢測得到的數(shù)據(jù)進(jìn)行顯示并利用交互式技術(shù)把數(shù)據(jù)實(shí)時傳給Processing圖形軟件進(jìn)行數(shù)據(jù)轉(zhuǎn)換,以圖像的形式顯示在顯示監(jiān)控區(qū)的屏幕上,當(dāng)溫濕度傳感器檢測數(shù)據(jù)低于(高于)某一設(shè)定值范圍時,同時會觸發(fā)蜂鳴器發(fā)聲報警提示作用。
1.2.2 超聲波測距模塊
超聲波是一種超出人耳接收頻率的一種聲波,頻率在20 kHz以上。超聲波的波長短、繞射小,它可作為聲波射線并定向傳播。超聲波傳感器被作為一種測距傳感器,能夠感應(yīng)與障礙物之間的距離信息。現(xiàn)在廣泛運(yùn)用在汽車與汽車的距離檢測報警(倒車?yán)走_(dá))可以在倒車時對車尾盲角區(qū)域檢測等。
利用超聲波檢測物體距離,UNO板將檢測數(shù)據(jù)發(fā)送至LCD1602液晶顯示屏或四位數(shù)碼管上進(jìn)行顯示并通過交互式技術(shù)把數(shù)據(jù)實(shí)時傳給Processing圖形軟件進(jìn)行數(shù)據(jù)轉(zhuǎn)換,以圖像的形式顯示在顯示監(jiān)控區(qū)的屏幕上,改變物體距離,使數(shù)據(jù)發(fā)生變化,當(dāng)檢測到數(shù)據(jù)低于(高于)程序設(shè)置范圍時,同時會蜂鳴器發(fā)出聲響。
1.2.3 測速模塊
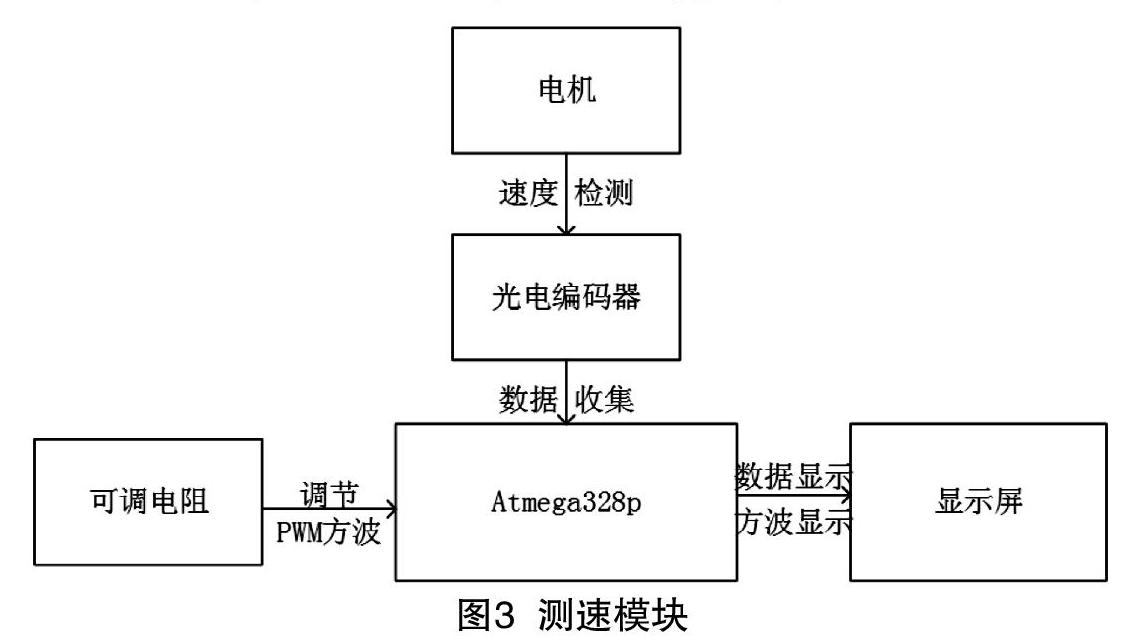
輪速傳感器在汽車上用于監(jiān)測汽車行駛中車速,使駕駛員能實(shí)時了解汽車的行駛速度,能及時調(diào)節(jié)行車速度做到安全駕駛,不超速行駛的功能,主要運(yùn)用于汽車內(nèi)部的定速巡航系統(tǒng)這套系統(tǒng)中。由于購置輪速傳感器的價格高,在本次實(shí)驗(yàn)研究中使用智能小車上的測速模塊來代替輪速傳感器,實(shí)驗(yàn)效果一致且成本低廉。測速模塊功能結(jié)構(gòu)圖如圖3所示。
智能小車測速模塊采用槽型對射光電傳感器,它由一個紅外發(fā)光二極管和一個NPN光電三極管組成,槽寬度為5.9mm。只要有非透明的物體遮擋紅外發(fā)光二極管的信號即可輸出TTL低平電進(jìn)行反饋,信號穩(wěn)定被廣泛用于小車測速,距離檢測,限位裝置等。
2 傳感器模塊軟件設(shè)計(jì)
2.1 溫濕度測量實(shí)驗(yàn)軟件設(shè)計(jì)
溫、濕度傳感器主要運(yùn)用在汽車內(nèi)部溫濕度的監(jiān)控,將車內(nèi)溫濕度數(shù)據(jù)反饋與車載電腦(MCU或ECU),并針對現(xiàn)有數(shù)據(jù)進(jìn)行處理計(jì)算,在輸出相應(yīng)的電平(高或低)控制車內(nèi)鼓風(fēng)機(jī)和空調(diào),對車內(nèi)溫度控制在人體舒適的范圍內(nèi),同時起到自動調(diào)節(jié)、節(jié)能的作用。
如圖4所示,首先對UNO板內(nèi)部程序進(jìn)行初始化,由UNO板輸出檢測信號發(fā)送給DHT11溫濕度傳感器對實(shí)時空氣中的溫、濕度進(jìn)行檢測并讀取數(shù)據(jù)溫度(T)和濕度(H),進(jìn)行下一步程序判斷。在此程序內(nèi)部設(shè)定了固定的溫度值和濕度值,如果采集的溫度(T)和濕度(H)超出(低于)設(shè)定值,將會觸發(fā)蜂鳴器線路中的蜂鳴器發(fā)聲報警。此程序中蜂鳴器線路代替了風(fēng)扇(鼓風(fēng)機(jī))和空調(diào)壓縮機(jī)啟動裝置。
2.2 超聲波傳測距實(shí)驗(yàn)軟件設(shè)計(jì)
超聲波傳感器主要被運(yùn)用在汽車的倒車?yán)走_(dá)上,可以有效的檢測車與車之間的距離、車與車庫墻壁的距離,顯示在汽車車載屏幕上,讓車主實(shí)時檢測車尾盲區(qū)的情況,當(dāng)有緊急情況發(fā)生時,能及時做出反應(yīng)。
超聲波傳感器主要運(yùn)用在汽車車尾車頭處,將汽車前方(后方)檢測數(shù)據(jù)反饋與車載電腦(MCU或ECU),并針對現(xiàn)有數(shù)據(jù)進(jìn)行處理計(jì)算,在輸出相應(yīng)的信號控制蜂鳴器進(jìn)行預(yù)警作用,并將實(shí)時距離顯示在LCD1602液晶顯示屏上或四位數(shù)碼管上。
如圖5所示為超聲波測距軟件流程圖。首先對UNO板內(nèi)部程序進(jìn)行初始化,由UNO板發(fā)出檢測信號給超聲波傳感器對實(shí)時檢測物體距離(L)進(jìn)行檢測并讀取數(shù)據(jù),進(jìn)行下一步程序判斷。在此程序內(nèi)部設(shè)定了固定距離(安全距離或極限距離)如果采集的距離(L)超出設(shè)定值,將會觸發(fā)蜂鳴器線路中的蜂鳴器發(fā)聲報警。
2.3 測速實(shí)驗(yàn)軟件設(shè)計(jì)
利用UNO板上有PWM(直流斬波調(diào)速)調(diào)速功能輸出引腳,使用可調(diào)電阻(電位器)連接UNO板PWM端口,用于調(diào)節(jié)PWM脈沖寬度對電機(jī)進(jìn)行調(diào)速,測速模塊將檢測到的數(shù)據(jù)經(jīng)由UNO板上的PID程序進(jìn)行計(jì)算,并通過UNO板上的串口輸出數(shù)據(jù)在數(shù)碼管上顯示實(shí)時電機(jī)的轉(zhuǎn)速,如圖6所示,首先對UNO板內(nèi)部程序進(jìn)行初始化,啟動電機(jī)轉(zhuǎn)動,調(diào)節(jié)電位器設(shè)置目標(biāo)值,開啟測速傳感器實(shí)時電機(jī)轉(zhuǎn)速,UNO板內(nèi)部程序運(yùn)用PID算法將電機(jī)實(shí)時轉(zhuǎn)速v(r/min)與目標(biāo)值進(jìn)行比較,電機(jī)轉(zhuǎn)速超出(低于)目標(biāo)值時,UNO板輸出不同的信號對電機(jī)轉(zhuǎn)速進(jìn)行調(diào)控加快(減慢)電機(jī)轉(zhuǎn)動速度,電機(jī)實(shí)時轉(zhuǎn)速v(r/min)與目標(biāo)值相似。
PID算法是由比例(P)、積分(I)和微分(D)三部分組成。PID基本表達(dá)式為:
其中:u(t)為 PID 調(diào)節(jié)器的輸出;e(t)為PID調(diào)節(jié)器的偏差,即設(shè)定值r(t)與實(shí)際測量值y(t)的偏差;Kp、1/ T1、TD分別為調(diào)節(jié)器的比例系數(shù)、積分系數(shù)和微分系數(shù)。PID控制器采用軟件實(shí)現(xiàn),具有很強(qiáng)的靈活性,可以根據(jù)具體要求改進(jìn)部分PID控制算法。其應(yīng)用領(lǐng)域廣泛;具有原理易懂、易于實(shí)現(xiàn)、控制參數(shù)獨(dú)立、參數(shù)選擇簡單等優(yōu)點(diǎn)。
3 設(shè)計(jì)總結(jié)
傳統(tǒng)實(shí)訓(xùn)箱和實(shí)訓(xùn)臺架,笨重且功能單一無法比較全面的演示及講解,耗時大,且維修,購置成本高,操作復(fù)雜,學(xué)生無法全面了解課程內(nèi)容。依照本文所述進(jìn)行搭建平臺,如圖7所示為實(shí)驗(yàn)箱樣品圖,本實(shí)驗(yàn)箱解決了傳統(tǒng)實(shí)訓(xùn)箱和實(shí)訓(xùn)臺架的占用空間及接線操作繁瑣的問題,使教師及學(xué)生在進(jìn)行演示及實(shí)驗(yàn)易于上手,學(xué)生們可以進(jìn)行嘗試性的二次開發(fā)對其內(nèi)部硬件的更新,有效利用內(nèi)部資源循環(huán)使用。
本文設(shè)計(jì)的實(shí)訓(xùn)箱操控簡便,只需一臺電腦和實(shí)訓(xùn)箱配合使用就可以實(shí)現(xiàn)汽車上所有傳感器的仿真實(shí)驗(yàn)以及原理講解,激起初學(xué)者的學(xué)習(xí)興趣。實(shí)訓(xùn)箱內(nèi)部可進(jìn)行硬件更新利用已現(xiàn)有的硬件進(jìn)行二次開發(fā),實(shí)現(xiàn)對現(xiàn)有資源利用。
參考文獻(xiàn)
[1] 銀石立方科技(北京)有限公司編.車聯(lián)網(wǎng)技術(shù)與應(yīng)用[M].北京:人民交通出版社股份有限公司,2017.
[2] 湖北汽車工業(yè)學(xué)院.RFID綜合試驗(yàn)箱:CN203941643U[P].2014-11-12.
[3] Reas C. Getting Started with Processing: A Quick, Hands-on Introduction[M]// Getting Started with Processing - a Hands-On Introduction to Making Interactive Graphics.,2010.
[4] 黃文愷,吳羽.Processing與Arduino互動編程[M].北京機(jī)械工業(yè)出版社,2016.
Design of the Training Platform for the Intelligent Vehicle System Based on Arduino
XIE Zhi-yang,CHEN Ji-qin,JI Lin-jing,CHEN Sheng-li
(College of Mechanical and Electrical Engineering,Heyuan Polytechnic, Heyuan Guangdong? 517000)
Abstract:Automobile technology tends to be automated and intelligent. The internal electronic circuit and sensors of the automobile are controlled by the microcomputer. However, the existing automobile teaching attachment has a single function, cumbersome operation and cannot keep up with the development of automobile intelligent technology. In order to solve the shortcomings of the existing automobile teaching attachment, an automobile intelligent system experimental platform is designed with the open source hardware Arduino as the control core. After the experiment, the experimental platform has complete functions, simple operation, visualization of experimental data and other functions, which can be promoted and used in similar majors of advanced vocational colleges.
Key words:Arduino;intelligent;teaching;attachment;sensor
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發(fā)展導(dǎo)向(2021年13期)2021-07-28 07:14:34
建材發(fā)展導(dǎo)向(2021年10期)2021-07-16 07:13:24
印刷工業(yè)(2020年4期)2020-10-27 02:46:02
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
中國儲運(yùn)(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國公路(2017年12期)2017-02-06 03:07:25
