基于VCU的商用車車速信號處理技術
2019-06-26 06:27:48呂亭強周亮亮李成岳趙維偉
汽車電器 2019年6期
呂亭強,周亮亮,江 進,李成岳,趙維偉,張 鵬
(一汽解放事業本部商用車開發院,吉林 長春 130011)
1 前言
車速識別技術是車輛控制中最基本的技術之一,傳統商用車采用渦輪蝸桿配磁電式車速傳感器,脈沖信號經過車速控制盒處理后發送儀表進行車速計算和顯示,具有傳遞環節多、誤差大、可靠性差、車速控制盒售后維護困難等缺點,市場反饋經常出現車速指針擺動、歸零等故障現象,并導致巡航功能失效,用戶駕駛體驗較差。
GB7258-2012規定,自2014年9月1日以后生產的半掛牽引車應安裝防抱死制動裝置,即ABS已經成為當今卡車標準配置,ABS系統本身采集4輪或6輪輪速信息,如果能加以利用,可提高車速信號可靠性。又EBS、行車記錄儀等部件需要第三方車速進行校驗,所以車速傳感器又不能取消。基于以上車輛客觀存在的兩路信號源,利用整車控制器進行綜合計算、冗余設計,可大大提供車速信號的準確性、可靠性。
本文從系統構成、計算方法、工程實現等幾個方面介紹了整車控制器車速處理技術的具體方案,試驗結果表明此方法切實可行,可大規模應用于量產車型。
2 系統構成與原理
本文所述方法基于商用車整車控制系統,其中包括VCU、車速傳感器、ABS控制器、ABS輪速傳感器、加速度傳感器、CAN儀表行車記錄儀,系統原理框圖如圖1所示。
VCU同時有以下兩種方式獲得車速。
1)方式1,傳感器車速:VCU硬線連接車速傳感器,采集變速器輸出軸靶輪脈沖信號,根據車輛后橋速比、輪胎滾動半徑計算車速。
2)方式2,ABS車速:ABS控制器通過底盤CAN總線發輪速信號給VCU,VCU根據車輛輪胎滾動半徑計算車速。
VCU優先選取傳感器車速作為第一車速,ABS車速作為冗余車速。當VCU識別出車速傳感器出現故障時將使用ABS車速,同時儀表提示駕駛員車速傳感器出現故障,盡快維修處理。
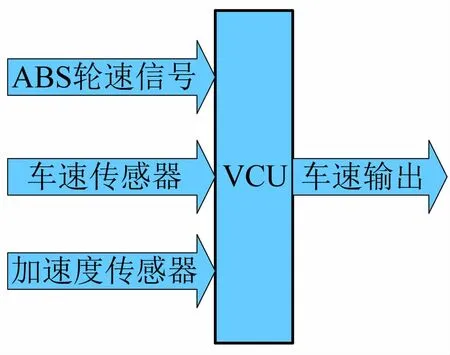
圖1 車速處理功能框圖
3 實現方法
3.1 傳感器車速計算方法
車速傳感器采用霍爾式頻率傳感器,霍爾式傳感器具有抗干擾能力強,輸出信號幅值不受靶輪轉速影響、使用壽命長等優點。傳感器安裝于變速器輸出軸靶輪,采集靶輪脈沖信號,VCU根據脈沖信號周期、車輛后橋速比、輪胎滾動半徑計算車速,計算公式如下:
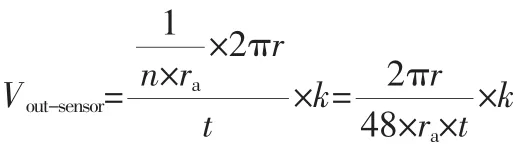
式中:Vout-sensor——VCU根據車速傳感器計算的車速;n——傳感器靶輪齒數;r——輪胎滾動半徑;ra——后橋主減速比;k——修正系數(默認為1,可標定);t——脈沖信號周期。
3.2 ABS車速計算方法
ABS發送的EBC2報文中含有前輪平均輪速信號,單位為km/h,正常情況下取前輪兩輪速的平均值,在車輪無抱死情況下較為準確。如一個出現故障,則發送正常工作的車輪輪速,如兩個同時出現故障,則不發送平均輪速,會發送故障狀態。
ABS控制器發送的輪速是按照輪胎滾動一周3 200 mm(廠家默認值)計算的,VCU需要根據實際車輛輪胎滾動半徑、滾動半徑誤差進行修正:
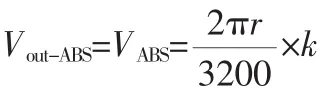
式中:Vout-ABS——VCU根據ABS發送的輪速信息計算的車速;VABS——ABS控制器發出的輪速值;r——輪胎滾動半徑;k——修正系數(默認為1,可標定)。
3.3 數據融合設計
關于數據融合,在1997年Linas與Hall兩位學者如下敘述:“能夠從多個傳感器的聯合數據庫提供的相關信息及其關聯數據中,獲取比單個傳感器信息所能得出的更詳細、更準確的結論”。其本質是對多個信息源在一定準則下進行綜合分析,得出更為可能正確的結果。
本文闡述的車速處理方法中,VCU優先選取車速傳感器作為信號源,當VCU識別出車速傳感器出現故障后,選用ABS車速進行儀表顯示及控制。
車速傳感器故障主要為信號不可信,這是一種邏輯故障,即通過邏輯判斷識別出的故障,主要有以下兩種邏輯。
1)車速傳感器與ABS發出的輪速信號進行對比,差別超過閾值則報車速傳感器故障。ABS輪速傳感器同時出現故障時,EBC2將不發輪速信息,即策略里默認只要可以接收到輪速信息即認為是可信的。
2)根據車速傳感器計算的車速計算車輛加速度,與加速度傳感器進行對比,差別超過一定閾值報車速傳感器信號不可信故障。
3.4 車速補償
根據法規《GB 15082-2008》要求,儀表顯示車速要大于實際車速,以免駕駛員超速行駛,具體范圍如下:
式中:v1——顯示車速;v2——實際車速。
原則上顯示車速在大于實際車速前提下越準確越好,無論是ABS車速還是傳感器車速,主要誤差來自于輪胎滾動半徑的誤差 (機械傳動系誤差可忽略),輪胎實際滾動半徑受胎壓、車輛載荷、胎面磨損等因素影響,為了保證輪胎更換前顯示車速仍不小于實際車速,經過試驗對車速補償2%較為合理,即k值為1.02,儀表進行1∶1顯示。
4 信號品質
車速信號品質分為最低識別車速、分辨率、誤差、響應時間 (表1),其中最低識別車速和分辨率取決于傳感器性能和車輛傳動系參數,響應時間取決于控制器處理速度、CAN總線傳輸速率、傳輸路徑。以FAW某主銷重型牽引車舉例說明。
車速傳感器/ABS輪速傳感器最低響應頻率:5 Hz;變速器輸出軸靶輪齒數:48;后橋主減速比:3.417;輪胎規格及滾動半徑:12R22.5,527 mm;ABS靶輪齒數:100。
車速傳感器最低識別車速:

車速傳感器分辨率:

ABS最低識別車速:

ABS車速分辨率:

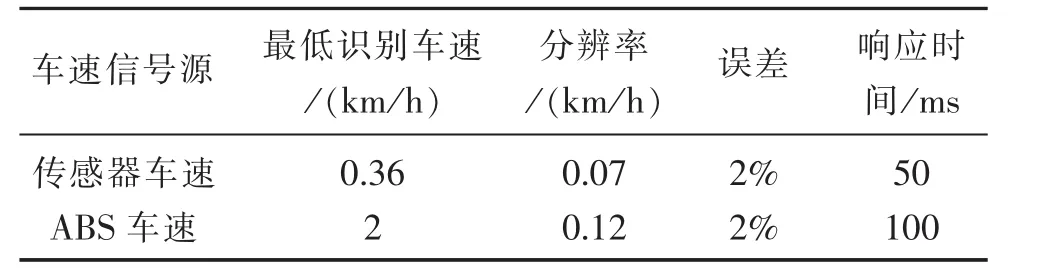
表1 車速信號品質
5 工程實現及售后
5.1 工程實現
為了實現車速計算,VCU需要獲取以下車輛參數:①車速傳感器靶輪齒數;②ABS齒圈齒數;③后橋主減速比;④輪胎滾動半徑。其中,FAW某車型前兩項為標準配置,固化于軟件中 (可標定),后兩項不同車型變化較為多樣,為了不讓這兩項影響VCU的整車標定數據種類,通過下面方法可以實現。
1)在PDM (Product Data Management,產品數據管理系統)車型結構下的后橋總成、輪胎總成中增加屬性信息,后橋總成增加主減速比,輪胎總成增加滾動半徑,如圖2、3所示。
2)在解放整車裝配線終端,EOL設備掃面車型碼獲取裝車BOM中的后橋減速比、輪胎半徑信息,并寫入VCU的預留Flash區,VCU獲取用于車速計算。
5.2 關于售后

圖2 輪胎總成滾動半徑參數

圖3 后橋總成減速比參數
商用車在用戶使用過程中經常遇見更換不同規格輪胎的情況,甚至為了適應運輸區域地理特點更換不同減速比的后橋,又或者車輛某些原因更換了新的VCU,VCU刷寫的整車數據中只有默認的輪胎半徑和后橋速比,這些可能的變化勢必會影響車速計算的準確性。傳統車輛這種情況需要重新計算傳遞參數選擇不同的車速控制盒,實現過程較為復雜且會增加成本。
基于VCU的車速方案,遇到以上情況,可利用診斷儀對后橋減速比、輪胎半徑進行簡單的選擇匹配即可,既快捷方便又經濟實惠。如圖4所示。
6 結束語
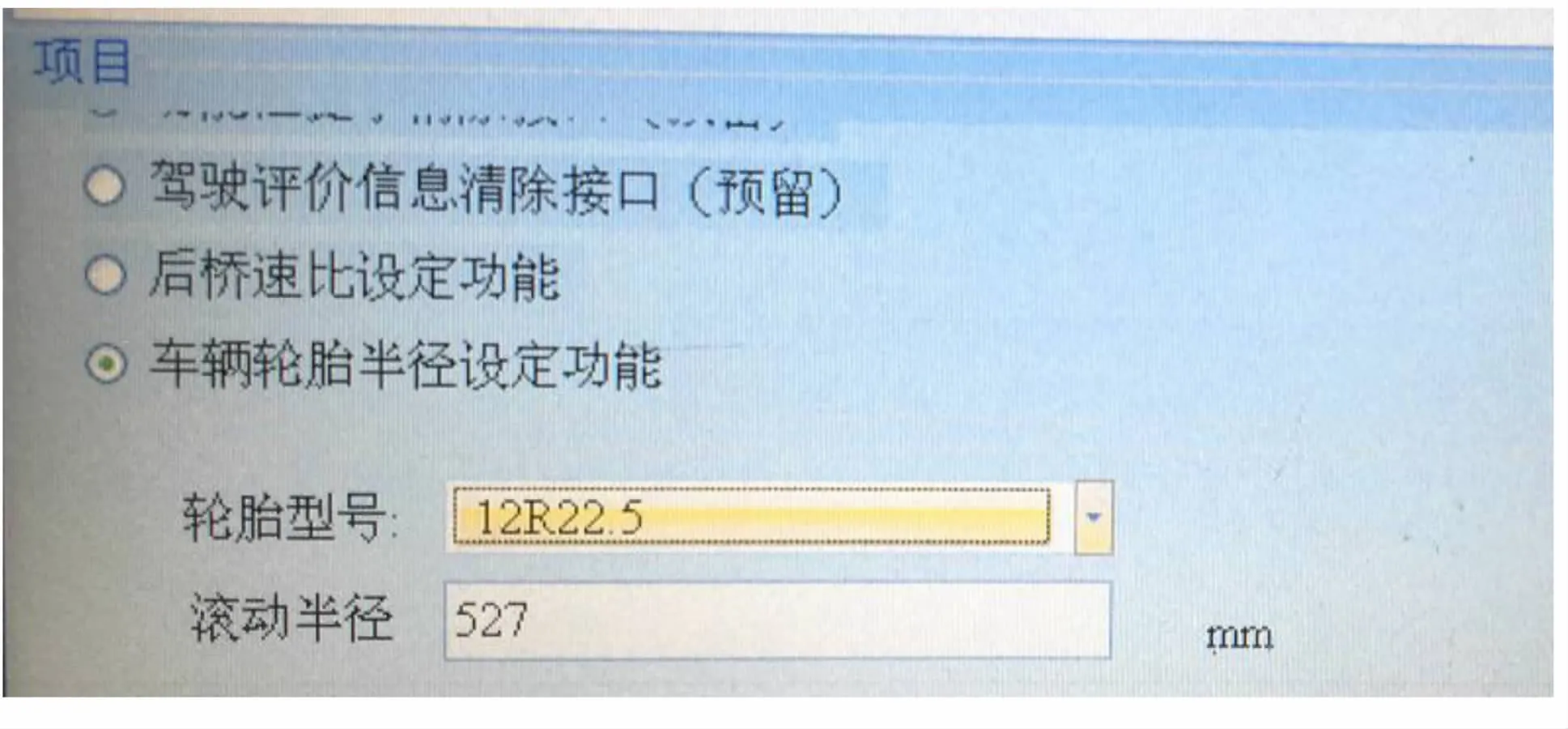
圖4 更換輪胎后寫入滾動半徑參數
本文介紹了基于整車控制器的車速處理技術,此方法利用車輛客觀存在的兩路車速源進行數據融合設計,大大降低車速故障率,提高了信號可靠性及巡航等控制功能品質;對應開發的車速計算參數EOL獲取方法簡單可行,降低整車數據管理工作量,為車型多配置、大規模生產及售后提供可行方案。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34