空盒氣壓表檢定壓力控制器的設計及應用
2019-06-26 09:19:10茅曉晨
儀器儀表用戶 2019年7期
茅曉晨
(上海市計量測試技術研究院,上海 201203)
空盒氣壓表檢定設備可以實現氣壓示值和溫度系數的自動檢定,提高儀表檢定、校準的工作效率以及操作準確度,簡化計量工作流程,降低工作強度。
1 空盒氣壓表檢定
1.1 動作過程
壓力控制的動作過程為:設備啟動時真空泵、DT1高壓電磁閥、DT2低壓電磁閥都給電。泵的DT1高壓電磁閥用于給后端增加壓力,而DT2低壓電磁閥用于給后端減小壓力。需要注意的是,高壓和低壓兩側各有一個節流閥,分別用來調節正負氣壓流量的(規程要求5hPa/min),氣體流量的大小直接影響氣壓室的壓力值精度和穩定性[1]。

圖1 示值檢定箱氣動原理圖Fig.1 Aerodynamic schematic diagram of the display value verification box
1)當箱內氣壓<檢定點氣壓時,真空泵對DT1高壓電磁閥加壓,當箱內氣壓達到預先設定的高壓緩沖罐氣壓時(略高于檢定點),真空泵和DT1高壓電磁閥斷電,同時打開DT3高壓穩定閥,使得高壓緩沖罐和箱內氣壓相通,以調節箱內氣壓。當箱內氣壓達到設定點時,使DT3高壓穩定閥關閉,箱內進入保壓階段,達到一定時間后進行電磁鐵敲擊,再進行送檢空盒氣壓表讀數。
2)當箱內氣壓>檢定點氣壓時,真空泵對DT2低壓電磁閥減壓;當箱內氣壓達到預先設定的低壓緩沖罐氣壓時(略低于檢定點),真空泵和DT2低壓電磁閥斷電,同時打開DT4低壓穩定閥,使得低壓緩沖罐和箱內氣壓相通,以調節箱內氣壓。當箱內氣壓達到設定點時,使DT4低壓穩定閥關閉,箱內進入保壓階段,達到一定時間后進行電磁鐵敲擊,再進行送檢空盒氣壓表讀數。
1.2 控制變量
根據圖1所示的檢定箱氣動原理圖,可以整理歸納出要控制的節點類型[2]。
DO1:真空泵繼電器
DO2:DT1高壓閥繼電器
DO3:DT2低壓閥繼電器
DO4:DT3高壓穩定閥繼電器
DO5:DT4低壓穩定閥繼電器
DO6:電磁鐵繼電器(手動)

圖2 檢定系統軟件界面圖Fig.2 Software interface diagram of verification system
AI1:高壓緩沖罐壓力傳感器
AI2:低壓緩沖罐壓力傳感器
AI3:氣壓箱壓力傳感器
AI4:氣壓箱溫度傳感器
AI5:氣壓標準器(mA或者232輸出)
檢定設備可對3種氣壓儀器進行檢定:
1)空盒氣壓表,包括平原空盒表(800 hPa~1050hPa)檢定點依次為:1050、1010、960、910、860、810、800、810、860、910、960、1010、1050,共13個檢定點。高原空盒表(500hPa~1050hPa),檢定點依次為:1050、1010、960、910、860、810、760、710、660、610、560、510、500、510、560、610、660、710、760、810、860、910、960、1010、1050,共25個檢定點。
2)空盒氣壓計,檢定過程同樣是高壓至低壓再至高壓(900hPa~1050hPa),檢定點依次為:1050、1010、960、900、960、1010、1050,共7個檢定點。
3)振筒類氣壓儀,檢定裝置預留了多個機械分支口與氣壓箱相通以放便檢定連接。
因此,控制系統與檢定點對應的變量表包括:m總檢定點數、n換向點數、P[m]逐個檢定點氣壓值。由于被檢氣壓表沒有電信號接口,需要人工輸入各個被檢表的示值。
1.3 溫度系數
空盒氣壓表附屬溫度表標度范圍為-11.0℃~41.0℃,最大允許誤差為±1.0℃。溫度系數Kt用公式求出:
Kt=(?P1-?P2)/(t1-t2)(hPa/℃,取兩位小數)

圖3 開環控制圖Fig.3 Open-loop control chart

圖4 閉環控制圖Fig.4 Closed-loop control chart
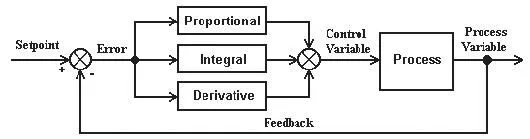
圖5 控制過程圖Fig.5 Control process diagram
式中:?P1在高溫點,標準氣壓值和空盒氣壓表、空盒氣壓計氣壓示值的氣壓差值,hPa;?P2在高溫點,標準氣壓值和空盒氣壓表、空盒氣壓計氣壓示值的氣壓差值,hPa;t1高溫點的溫度值,℃;t2低溫點的溫度值,℃。具體溫度系數的數值要求范圍見《JJG272-2007空盒氣壓表和空盒氣壓計檢定規程》表1中的內容[3,4]。

圖6 寄存器設置圖Fig.6 Register setup diagram
2 PID控制原理
PID控制包括定位點設置、偏差計算、比例控制、積分控制和微分控制。PID控制算法包括IND和ISA兩種方式:

dt是測量時間,Derivative是導數值,可以為(當前誤差-以前誤差)/dt,也可以配置為(當前測量值-以前測量值)/dt,Ti是積分時間,Td是微分時間。K是按PVstep/Cvstep計算開環增益。Kp是比例增益,最終反饋給系統的錯誤值的數量。Ki是積分增益,時間越快,積分部分的增益就越大。Kd是導數增益,表示有多少變化率反饋給系統。SP是設定點,為需要達到和維護的值。PV是過程變量,為過程的測量輸出的壓力值。CV是控制變量,將PID函數應用于控制過程的結果,而這個值包含比例、積分、微分和偏置的分量[5]。
IND方式采用標準PID算法,調節效果更精確,適用于專家級或精度要求嚴格的項目。而ISA方式調節簡單、快速,但精度效果一般,適用于初級應用或精度要求一般的項目。在一些典型的工業過程控制中,往往需要控制一個過程參數,如溫度或壓力值,可以應用開環控制。
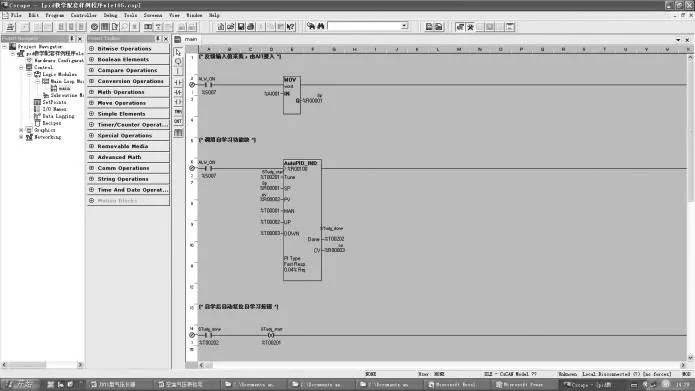
圖7 PID功能模塊調用梯形圖Fig.7 PID Function module call trapezoidal diagram
在這樣的系統中,控制器接收來自用戶的設定值。然后控制器生成一個值再發送,稱為控制變量。而所需的參數是流程變量,它根據流程控制器發送的值進行更改。流程控制器無法確定流程是否實際生成了正確的流程變量[6]。
在要求響應速度的許多情況下,這就足夠了。但這些假設往往是不正確或不準確的。大多數過程控制系統使用閉環反饋,也做閉環系統。動作的控制器稱為比例控制器。實際上,誤差實際上是全范圍誤差的一部分(通常用百分比表示)。控制過程需要更長的時間,但是完全控制更準確。圖5僅為比例控制下的典型過程。
PID功能塊地址、期望值寄存器地址、過程值寄存器地址、控制值寄存器地址、手動控制寄存器地址、手動上升寄存器地址、調節參數設置選項、自學習功能選項、手動下降寄存器地址。
3 結論
研究了空盒氣壓表氣壓示值誤差和溫度系數的檢定過程,依據示值檢定箱執行機構的氣動工作原理,整理出控制方案,空盒氣壓表檢定設備可以實現氣壓示值和溫度系數的自動檢定,提高了儀表檢定/校準的工作效率。