采用神經網絡控制的再生式液壓減振器系統
2019-07-04 02:12:52魏培鮮王一剛
中國工程機械學報 2019年3期
魏培鮮,王一剛
(1.黃河交通學院 汽車工程學院,河南 武陟 454950; 2.重慶工程職業技術學院 教務處,重慶 402260)
隨著社會的快速發展,石油資源損耗越來越嚴重,如何降低車輛油耗是社會面臨的重要問題[1].車輛對石油的耗費量較大,必須加快新能源車輛快速發展.在新能源車輛研發過程中,我國一直保持自主研發.在過去20年,如何回收車輛能量損失一直是研究人員關注的重要問題[2].據不完全統計,汽車消耗的燃料大約只有20%用于推動車輛前進,燃油實際使用效率較低.因此,加快車輛能量回收裝置的研發,對于促進國家經濟可持續發展具有重要的意義.
當前,許多研究者從多種角度對車輛能量回收展開了研究.文獻[3-4]研究了液壓混合動力車輛能量回收控制方法,分析了液壓制動原理,采用模糊控制方法,建立系統仿真模型,在不同速度和制動強度條件下對能量回收進行仿真,提高了能量回收效率.文獻[5-6]研究了車輛能量回收系統的設計與仿真,建立電液比例壓力與流量的數學模型,推導出液壓閥芯運動方程式,編寫能量回收仿真模型,在不同工況下對能量回收進行仿真驗證,為能量回收實驗研究奠定基礎.
以往研究的車輛能量回收裝置輸出功率較低,車輛續航里程短.本文設計了再生式液壓減振器系統模型,推導出液壓流量運動方程式,對傳統PID控制方法進行改進,設計了神經網絡PID控制方法.在路面激勵情形下對車輛輸出功率進行仿真驗證,并與傳統PID控制方法進行比較分析,為深入研究車輛能量回收的控制方法提供理論依據.
1 液壓減震系統
1.1 工作原理
液壓減震器組成結構如圖1所示,車輛在不平整的路面上運動時,液壓缸活塞就會產生上、下移動,通過液壓缸活塞兩側分布的止回閥傳遞到液壓馬達,帶動馬達旋轉運動,將活塞上、下運動轉換成馬達旋轉運動,液壓馬達與發電機連接,發電機就會產生電能.

圖1 液壓減振發電系統Fig.1 Hydraulic damping power generation system
1.2 系統模型
1.2.1液壓流量
采用正弦波作為液壓活塞運動激勵函數,其速度方程式為
(1)
式中:f為振動頻率;S為活塞上、下止點位移;t為時間.
當活塞采用剛性連接液壓執行器時,其有效運動位移Sa方程式為
(2)
活塞運動包括壓縮運動和伸出運動,壓縮運動體積方程式為
(3)
式中:Vcap為無桿腔體積;Vrod為有桿腔體積;Vcyd為液壓缸初始體積;S0為活塞初始位置;V為活塞運動速度;Acap為無桿腔活塞面積;Arod為有桿腔活塞面積;Vic為無桿腔液壓缸體積;Vir為有桿腔液壓缸體積.
伸出運動體積方程式為
(4)
車輛在不平整路面運動時,活塞產生上、下移動,作用于活塞兩側力的方程式為
(5)
式中:Fcap為壓縮運動活塞作用力;Frod為伸出運動活塞作用力;Pcap為無桿腔壓力;Prod為有桿腔壓力.
為了比較輸出效率,總功率為活塞運動功率,其方程式為
(6)
式中:Pin為活塞運動功率.
液壓缸止回閥流量流出方程式[7]為
(7)
液壓缸止回閥流量流入方程式為
(8)
式中:Cd為流量系數;Acv為止回閥接口面積;Pcv為止回閥預加載壓力;Pm為馬達入口處壓力;ρ為液壓油密度;Pr為低壓側流入壓力.
液壓缸活塞在壓縮運動時,其壓力方程式為
(9)
液壓缸活塞在伸出運動時,其壓力方程式為
(10)
式中:βcap為無桿腔液壓油體積模量;βrod為有桿腔液壓油體積模量.
蓄能器的作用是為了保持流入馬達流量的平穩性,其流體體積方程式為
(11)
蓄能器總體積方程式為
(12)
蓄能器流入流量方程式為
(13)
式中:Vt為蓄能器總可變體積;Vagd為蓄能器固有體積;Aacc為蓄能器流入端面積;k為蓄能器氣體比熱容.
液壓馬達流入端口壓力變化方程式為
(14)
式中:VT為液壓馬達入口總體積.
在液壓馬達流入端口,液壓油體積變化方程式為
(15)
由于馬達內部有部分液壓油會泄露,液壓馬達流量方程式為
(16)
式中:K1k為液壓馬達泄漏系數;ωm為角速度.
液壓管路中壓力損失方程式為
(17)
式中:L為液壓管路長度;Dm為液壓馬達排量;Dp為液壓管路直徑;σ為流量系數.
1.2.2馬達轉速
根據牛頓第二定律[8],馬達轉速方程式為
(18)
式中:Jt為轉動慣量;Tm為驅動扭矩;Trf為摩擦轉矩分量;T1為電磁轉矩.
各個負載轉矩方程式為
(19)
式中:ηm為機械效率;Cv為摩擦系數.
1.2.3電力
電磁轉矩方程式為
(20)
式中:I為電流;kT為轉矩系數.
電動勢E方程式為
(21)
式中:kV為電動勢常數.
假定磁體的變化率是恒定的,則電流的變化率方程式為
(22)
式中:Lin為電感;RL為負載電阻;Rin為內部電阻.
再生輸出功率Preg的輸出方程式為
(23)
式中:U為電壓.
液壓減震器的總效率為
(24)
2 神經網絡PID控制
2.1 PID控制
PID控制在線調節流程如圖2所示,根據反饋誤差信息調整比例、積分、微分系數,從而降低被控對象輸出誤差[7].
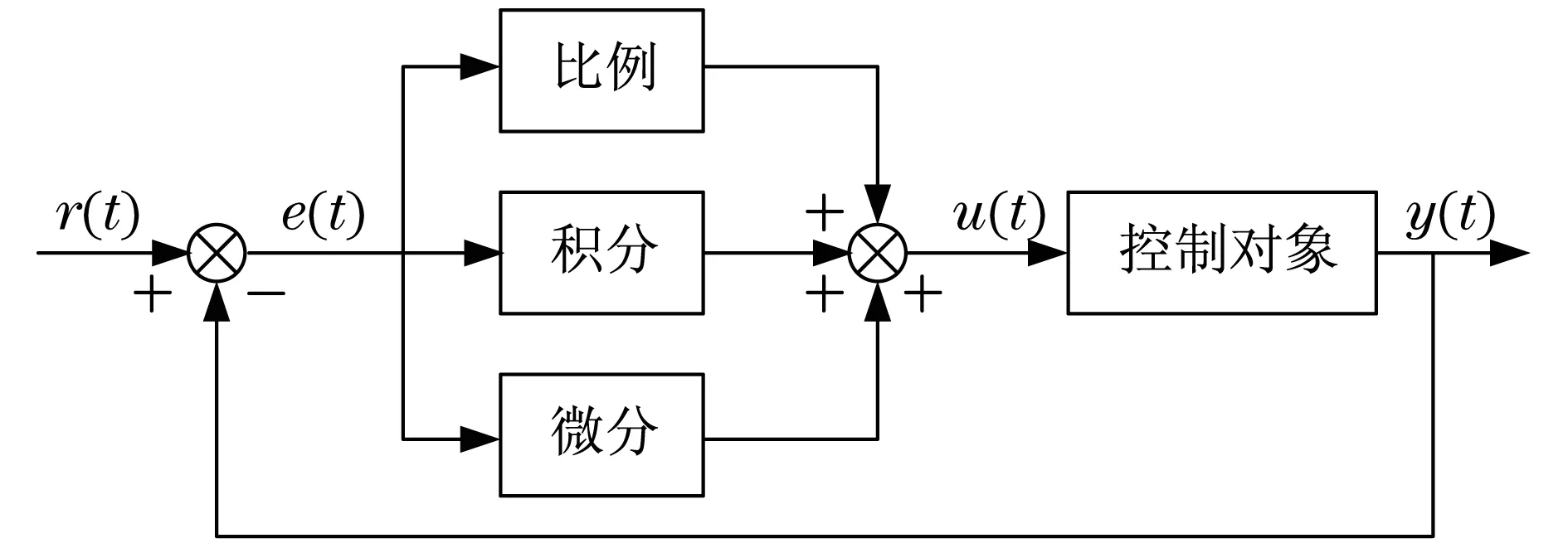
圖2 PID控制流程Fig.2 PID control structure
PID控制在線輸出誤差方程式為
(25)
式中:e(t)為誤差;r(t)為輸入值;y(t)為輸出值.
PID控制方程式[9-10]為
(26)
式中:kp為比例調節系數;ki為積分調節系數;kd為微分調節系數.
2.2 小腦神經網絡PID控制
小腦模型神經網絡(Cerebellar Model Articulation Controller,CMAC)結構如圖3所示,具有響應速度快、輸出能力強及在線調整次數少等優點.
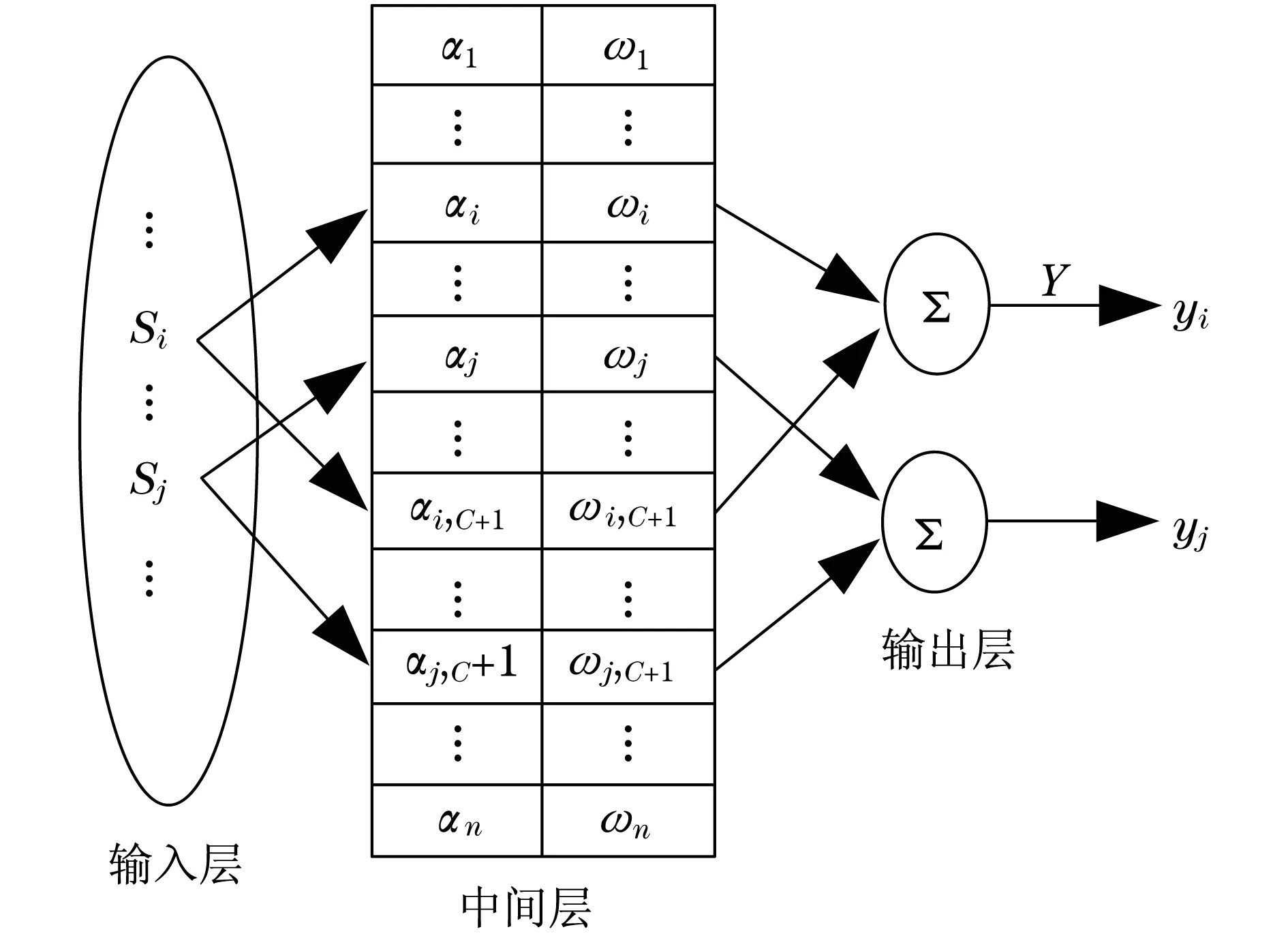
圖3 小腦神經網絡結構Fig.3 Cerebellar neural network structure
采用小腦神經網絡PID控制,具有兩者各自優勢:既有非線性函數控制能力,又有PID獨立模型控制特性.而車輛液壓控制系統具有復雜的非線性特性,采用小腦神經網絡PID控制能夠保持記憶功能,從而實現在線輸出功能,如圖4所示.
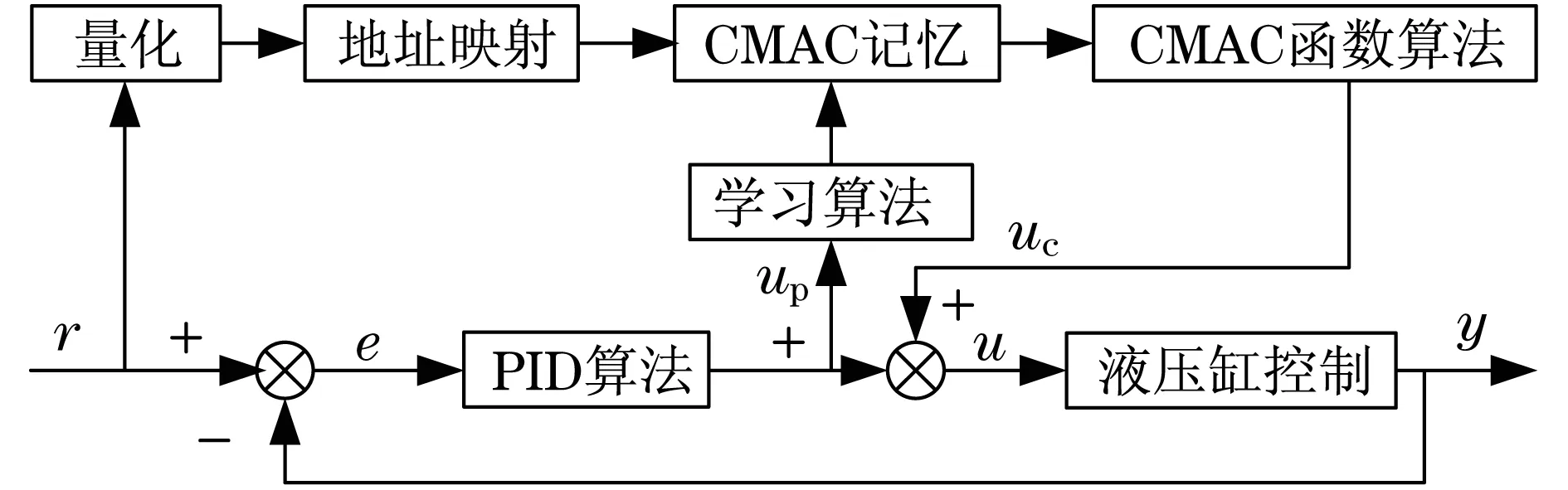
圖4 小腦神經網絡PID控制流程圖Fig.4 Cerebellar neural network PID control
3 仿真及分析
為了驗證神經網絡控制車輛液壓減震器能量回收效果,采用Matlab軟件對其進行仿真.仿真參數設置為:路面激勵頻率為0.5 Hz,內部電感為0.04 H,ki=1,kp=60,kd=3,網絡學習速率為0.1,負載電阻為20 Ω.采用PID控制輸出功率變化如圖5所示,而采用神經網絡PID控制輸出功率變化如圖6所示.
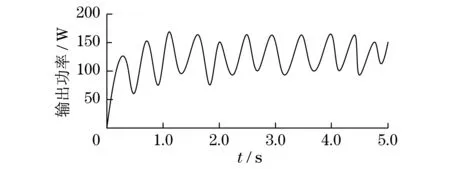
圖5 PID控制輸出功率Fig.5 PID control output power
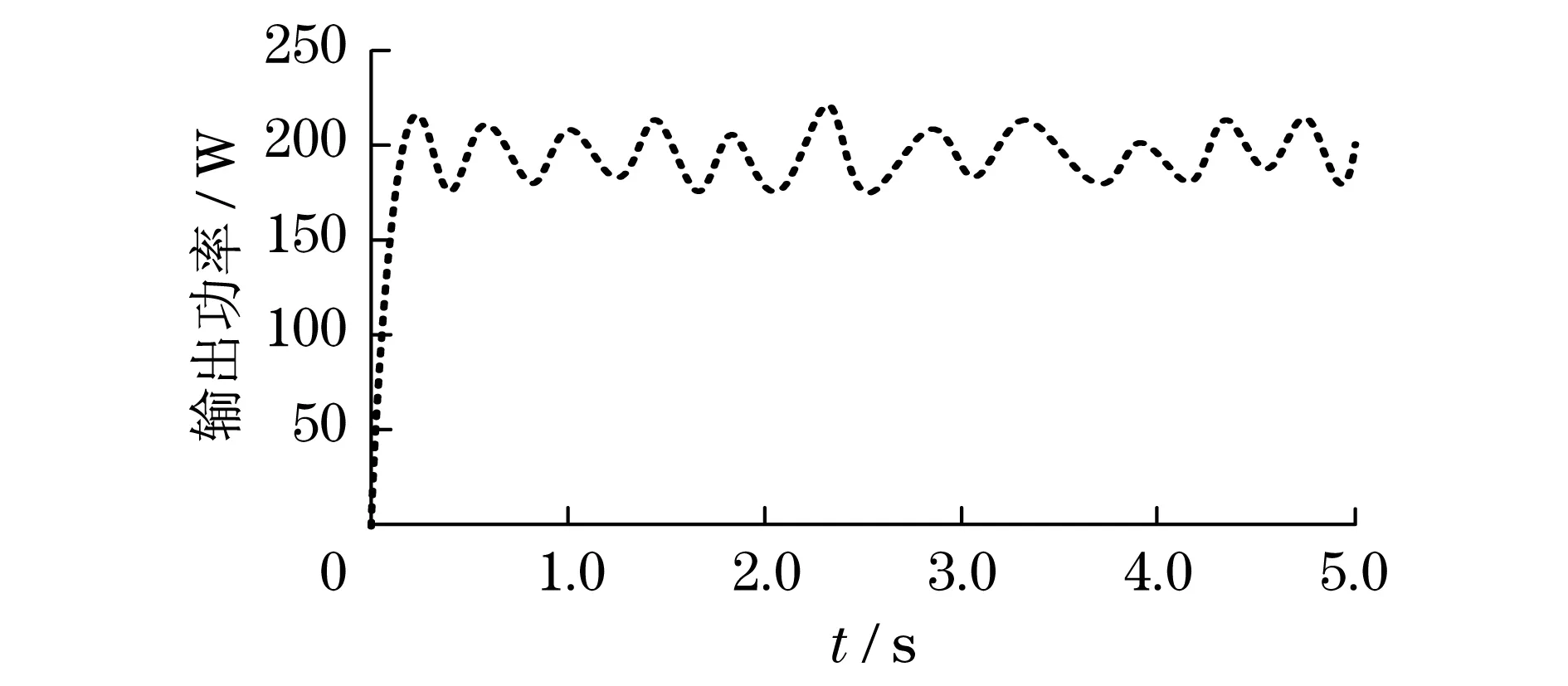
圖6 神經網絡PID控制輸出功率Fig.6 Neural network PID control output power
由圖5可得:車輛液壓減震器采用PID控制方法,輸出功率變化范圍為74~168,變化幅度為94 W,波動幅度較大,輸出的最大功率為168 W.由圖6可得:車輛液壓減震器采用神經網絡PID控制方法,輸出功率變化范圍為174~220 W,變化幅度為46 W,波動幅度較小,輸出的最大功率為220 W.因此,采用神經網絡PID控制方法,可以增加輸出功率,提高輸出效率.
4 結論
本文設計了車輛液壓減震器,用于車輛行駛過程中能量的回收,采用神經網絡耦合PID控制方法,并對輸出功率進行仿真驗證,主要結論如下:
(1) 車輛行駛在不平整路面,容易產生上、下振動,設計液壓減震器裝置,可以回收振動產生的電能,從而節約能源.
(2) 采用常規PID控制方法,車輛行駛過程中,液壓減震器受到路面激勵振動后,輸出功率波動幅度較大,輸出效率較低.
(3) 采用神經網絡耦合PID控制方法,能夠抑制路面噪聲的干擾,提高液壓減震器輸出功率,輸出效率較高.
