基于SSD-CF的無人艇目標檢測跟蹤方法
2019-07-10 07:44:01陳欣佳劉艷霞洪曉斌王慧芳
中國測試 2019年2期
陳欣佳 劉艷霞 洪曉斌 王慧芳
摘要:針對目前目標檢測和目標跟蹤算法對無人艇運算配置要求高、速度慢等問題,該文一種提出基于SSD-CF的無人艇目標檢測跟蹤方法。利用MobileNets結構結合SSD目標檢測算法構建輕量級卷積神經網絡,實現無人艇的水面目標檢測。目標檢測結果作為相關濾波CF目標跟蹤算法的初始輸入,并在目標跟蹤過程的保障其有效性。通過MODD水面船只視頻數據實驗表明,SSD-CF方法融合目標檢測與目標跟蹤算法,可有效地降低對運算力的要求,提升目標檢測跟蹤速度和目標位置的穩定連續性。
關鍵詞:無人艇;目標檢測;目標跟蹤;SSD;MobileNets;相關濾波
中圖分類號:TN212
文獻標志碼:A
文章編號:1674–5124(2019)02–0145–06
0 引言
水面無人艇實際應用廣泛,如水質檢測、海面巡邏監控等。隨著人工智能技術的發展,現代無人艇海面自主航行領域的各項技術也在不斷完善。水面目標準確檢測跟蹤是無人艇的核心技術。但其目前較好的目標檢測都依賴于深度學習卷積網絡,檢測速度較慢,且對于運算環境要求高。目標跟蹤算法在給出目標之后能較好地穩定跟蹤目標,但目標丟失后無法重新追蹤目標。目前目標檢測算法主要分為3類:1)傳統的檢測算法,主要有Cascade+Harr[1]、SVM+HOG[2]、DPM算法等利用手工特征結合機器學習類算法,以及在此類算法上的改進和優化;2)候選窗選擇算法結合深度學習分類的二階段檢測算法,主要有RCNN、SPP-net[3]、Fast-RCNN、Faster-RCNN[4]等系列方法;3)基于一階段的深度學習回歸方法,主要算法有YOLO、SSD[5]等,一次性對目標位置以及目標類別進行學習計算。二階段的算法相對于一階段的目標檢測算法精度高但速度慢。結合深度學習的算法大大提高了目標檢測的準確度,但運算環境的要求比較高,速度也有些下降。
傳統的目標跟蹤算法有光流法[6]、卡爾曼濾波、粒子濾波[7]、Mean-Shift[8]。隨著機器學習的興起,近幾年在目標跟蹤中的成果基本都是使用機器學習的方法。目前跟蹤算法可以被分為生成式和判別式兩大類別。生成式模型的思想是提取目標特征學習出代表目標的模型,搜索圖像進行模式匹配,匹配度最大的區域即為目標結果[9]。判別式模型的思想是將目標跟蹤問題作為分類問題,區分目標和背景。目標區域和背景區域分別為正、負樣本,通過機器學習算法訓練分類器判別目標和背景,使用分類器搜索最匹配區域。判別類模型中目前最突出的發展是相關濾波和深度學習方法的應用。自2010年Bolme等[10]提出MOSSE算法,首次將相關濾波應用到目標跟蹤領域中,由于其計算速度快、準確度高等特點,吸引了大批研究者,相關濾波與傳統算法的各種結合嘗試從不同的角度對算法進行提升。后續在MOSSE算法基礎上相繼提出了CSK[11],KCF[12]、DSST、STC、SAMF、CN、SRDCF、Deep-SRDCF、C-COT、ECO等拓展算法。其中部分算法結合了深度學習算法,利用卷積網絡自動提取特征,提升了目標跟蹤效果,但也導致運算速度下降。
針對海面障礙目標的實時準確檢測跟蹤需求,使用深度學習類目標檢測可以達到比較好的結果,但對于無人艇上位機運算環境要求較高,因此本文通過MobileNets進一步改進SSD目標檢測網絡模型,降低運算要求,加快檢測效率。同時結合CF相關濾波目標跟蹤算法,實現目標實時跟蹤,最終實現目標的準確檢測與實時跟蹤。
1 基于SSD-CF目標檢測跟蹤方法
1.1 SSD目標檢測算法
為了實現無人艇對水面目標的實時檢測跟蹤,首先需要檢測出目標。本文采用SSD(singleshotmultiboxdetector)目標檢測算法進行目標檢測。SSD算法的主要思路是均勻地在圖片的不同位置進行密集抽樣,同時采用不同尺度和長寬比,利用卷積網絡提取特征后直接進行目標分類與位置回歸,整個過程一步完成檢測,因此算法速度較快。
SSD算法中采用密集取樣生成目標位置候選框。在不同分辨率的特征圖上按不同比例生成固定大小的單元格。對于所有單元格再按{1,2,3,1/2,1/3}不同的長寬比增加候選框。在不同分辨率的特征圖上只考慮一個尺度的候選框。如用m個特征圖來做預測,每一個特征圖中候選框的尺寸大小計算公式:
其中,smin為0.2,smax為0.95,意味著最底層的尺度是0.2,最高層的尺度是0.95。根據不同長寬比ar∈{1,2,3,1/2,1/3},則可計算出每一個候選框的寬wk和高hk:
對于長寬比為1時,另外增加了一個尺度s′k=√sksk+1的候選框。最終每張特征圖上的單元格都有6個候選框。候選框與標注框進行匹配,如果面積交并比大于0.5為正例,其他為反例。
SSD算法目標損失函數包含位置損失和置信損失。位置損失是候選框l和標注框g位置參數之間的平滑L1損失函數。置信損失是softmax損失對多類別置信c和權重項α設置為1的交叉驗證。其中N是匹配的默認框數量,其中x∈{1,0},為指示函數,表示標注框與候選框匹配與否。
SSD算法中使用兩種策略提升算法性能:1)難例挖掘,根據上面的候選框生成策略會產生大量的負訓練樣本,通過選擇置信損失較大的候選框作為反例,使得反例不超過正例的3倍;2)數據增廣,對原圖進行隨機裁剪和在目標周圍裁剪,隨機翻轉來增加訓練集。這兩個策略都有效提升了算法的準確度。
1.2 MobileNet-SSD輕量級目標檢測算法
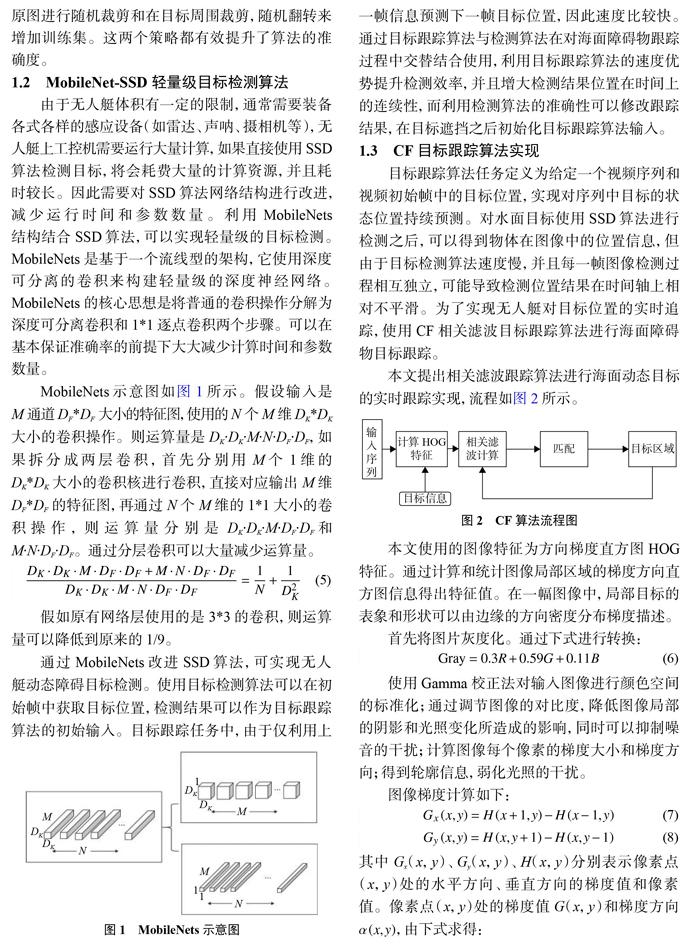
由于無人艇體積有一定的限制,通常需要裝備各式各樣的感應設備(如雷達、聲吶、攝相機等),無人艇上工控機需要運行大量計算,如果直接使用SSD算法檢測目標,將會耗費大量的計算資源,并且耗時較長。因此需要對SSD算法網絡結構進行改進,減少運行時間和參數數量。利用MobileNets結構結合SSD算法,可以實現輕量級的目標檢測。MobileNets是基于一個流線型的架構,它使用深度可分離的卷積來構建輕量級的深度神經網絡。MobileNets的核心思想是將普通的卷積操作分解為深度可分離卷積和1*1逐點卷積兩個步驟。可以在基本保證準確率的前提下大大減少計算時間和參數數量。
實驗得出MobileNet-SSD在MODD數據集上的平均檢測速率為0.8f/s,CF目標跟蹤的平均檢測速率為22f/s。CF跟蹤算法提升了視頻目標處理速度。MobileNet-SSD目標檢測算法與CF目標跟蹤的融合可以有效地實現實時對海面目標的檢測跟蹤。
實驗三在目標存在遮擋圖像范圍的情況下進行SSD-CF目標檢測跟蹤算法驗證。通過試驗無人艇拍攝障礙物視頻,無人艇攝像機移動速度較快,可能會將目標移出圖像范圍,從而導致跟蹤過程中目標丟失。
實驗三中視頻序列的初始目標位置通過目標檢測算法獲取,由目標跟蹤算法實現實時跟蹤。如圖6所示,在視頻第53幀,目標部分遮擋的情況下,SSD-CF算法仍能夠準確定位,在71幀,目標超出圖像范圍并在第79幀可以通過檢測算法重新定位目標位置,由跟蹤算法進行接下來的持續跟蹤,體現算法的有效性。實驗結果表明SSD-CF目標檢測跟蹤算法在目標部分遮擋和完全丟失的情況下,通過MobileNet-SSD目標檢測算法可以快速地為CF跟蹤算法提供初始目標位置信息,并且在目標跟蹤過程中,如果目標丟失,檢測算法能夠重新定位目標位置,實現無人艇對海面障礙物持續跟蹤。3結束語
無人艇的自主航行依靠于目標的準確檢測和快速跟蹤,采用傳統的深度學習算法耗費的運算資源比較大。MobileNet-SSD目標檢測算法,在一定程度上提高了檢測速度,降低運算環境要求;同時,檢測算法對視頻的每一幀都獨立檢測,可能存在位置漂移,提出使用CF目標跟蹤對于目標檢測結果進行后續跟蹤,并利用MobileNet-SSD在跟蹤過程目標丟失,重新定位目標位置,降低運算量。因此,本文提出的SSD-CF算法提高目標位置跟蹤速度,可避免直接使用目標檢測算法進行目標定位,節約運算資源,提高跟蹤目標的位置穩定性,實現無人艇的水面目標持續跟蹤需求。下一步工作將結合圖像檢測跟蹤結果與其他傳感器信息,分析目標運動狀態,進行無人艇避障決策研究。
參考文獻
[1]VIOLAP, MICHAELJ.Rapidobjectdetectionusingaboostedcascadeofsimplefeatures[C]//Proceedingsofthe2001IEEEComputerSocietyConference, 2001.
[2]DALALN, BILLT.Histogramsoforientedgradientsforhumandetection[C]//IEEEComputerSocietyConference,2005.
[3]HEKM, ZHANGXY, RENSQ, etal.Spatialpyramidpoolingindeepconvolutionalnetworksforvisualrecognition[C]//Europeanconferenceoncomputervision.Springer, 2014.
[4]RENSQ.Fasterr-cnn: Towardsreal-timeobjectdetection
withregionproposalnetworks[J].IEEETransactionsonPatternAnalysisandMachineIntelligence.2015,39(6): 1137-1149.
[5]LIUW.Ssd: Singleshotmultiboxdetector[C]//Europeanconferenceoncomputervision, 2016.
[6]魯永杰,王思明.一種改進的運動目標跟蹤方法[J].中國測試,2015(7):95-98.
[7]BREITENSTEINMD.Robusttracking-by-detectionusingadetectorconfidenceparticlefilter[C]//IEEE12thInternationalConferenceonComputerVision, 2009.
[8]COMANICIUD, VISVANATHANR, PETERM.Real-timetrackingofnon-rigidobjectsusingmeanshift[C]//ProceedingsIEEEConferenceonComputerVisionandPatternRecognition, 2000.
[9]朱文青,劉艷,卞樂,等.基于生成式模型的目標跟蹤方法綜述[J].微處理機,2017,38(1):41-47.
[10]BOLMEDS.Visualobjecttrackingusingadaptivecorrelationfilters[C]//2010IEEEConferenceonComputerVisionandPatternRecognition, 2010.
[11]HENRIQUESJF.Exploitingthecirculantstructureoftracking-by-detectionwithkernels[C]//Europeanconferenceoncomputervision, 2012.
[12]HENRIQUESJF, CASEIROR, MARTINSP, etal.High-speedtrackingwithkernelizedcorrelationfilters[J].IEEETransactionsonPatternAnalysisandMachineIntelligence, 2015, 37(3): 583-596.
[13]KRISTANM, SULICKV, KOVACICS, etal.Fastimage-basedobstacledetectionfromunmannedsurfacevehicles[J].IEEETransactionsonCybernetics, 2016, 46(3): 641-654.
