電動汽車電驅(qū)動橋換擋品質(zhì)控制策略研究
2019-07-19 05:36:54李陽楊林袁靜妮杜茂
汽車技術 2019年7期
關鍵詞:控制策略
李陽 楊林 袁靜妮 杜茂
(上海交通大學,汽車電子技術研究所,上海 200240)
主題詞:電動汽車 電驅(qū)動橋 換擋品質(zhì) 控制策略
1 前言
電驅(qū)動橋是針對電動汽車而設計的一種機電一體化驅(qū)動系統(tǒng),其具有結(jié)構緊湊、體積小、傳動效率高、成本低等優(yōu)點,被廣泛應用于電動汽車[1]。近年來,相比于采用固定速比的電驅(qū)動橋,多擋AMT電驅(qū)動橋因其降低了車輛對驅(qū)動電機和電池的要求,有利于提升整車動力性和經(jīng)濟性,已成為電動汽車驅(qū)動系統(tǒng)的發(fā)展趨勢[2]。然而,目前常用的電驅(qū)動橋由于驅(qū)動電機側(cè)置而產(chǎn)生激勵振動,同時不利于整車電池系統(tǒng)的布置。
作為AMT系統(tǒng)的關鍵技術,換擋控制與車輛行駛平穩(wěn)性密切相關,換擋品質(zhì)的優(yōu)劣直接影響駕乘舒適性甚至系統(tǒng)可靠性。換擋品質(zhì)主要體現(xiàn)在換擋時間和換擋沖擊度,如何縮短換擋時間、降低換擋沖擊度、提高車輛的動力性和平順性是AMT換擋控制中的核心問題。柴本本等[3]提出一種最優(yōu)控制策略,對驅(qū)動電機轉(zhuǎn)矩進行反饋補償和采用非線性時間最優(yōu)控制對換擋電機進行位置控制以優(yōu)化換擋過程,改善了換擋品質(zhì);劉正偉[4]以換擋時間最短為目標,對摘擋和掛擋階段進行優(yōu)化控制,通過在Bang-Bang控制的基礎上加入一段自適應控制,改善了傳感器采樣誤差造成的控制效果不佳的問題;臺玉琢等[5]提出一種基于最優(yōu)控制序列和最優(yōu)軌跡的前饋控制和反饋控制相結(jié)合的控制方法,降低了換擋過程中的車輛沖擊度。然而,如何同時縮短換擋時間和降低換擋沖擊度,尚缺乏有效的控制策略。
為此,本文設計了一種同軸式兩擋電驅(qū)動橋,并以此為對象,在深入分析其換擋過程和換擋品質(zhì)影響因素的基礎上,提出改善換擋品質(zhì)的控制策略,并基于仿真軟件AMESim搭建換擋控制仿真模型,對提出的控制策略的有效性進行驗證。
2 同軸兩擋電驅(qū)動橋系統(tǒng)方案設計
本文設計的電驅(qū)動橋采用由變形大速比行星輪齒輪系與圓柱齒輪系構成的復合輪系,如圖1所示。采用同軸布置的結(jié)構,具有2個擋位,通過同步器實現(xiàn)換擋控制,通過雙行星排實現(xiàn)主減速器功能,同時沒有離合器,可以減小尺寸,降低成本。該電驅(qū)動橋不僅兩擋速比較大,而且兩擋速比級差可方便地控制在2以內(nèi),因而既保證了行車過程中可順利換擋,又有利于驅(qū)動電機的高速化和小型化,并提升車輛動力性和經(jīng)濟性。相對于目前常用的平行軸布置電驅(qū)動橋,它還可有效避免電機側(cè)置引起的振動,且為整車電池系統(tǒng)提供更大的布置空間,提高電動汽車續(xù)駛里程。
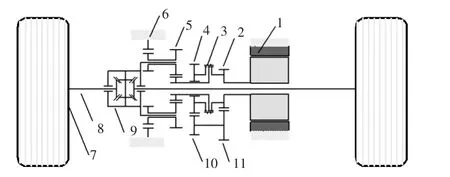
圖1 電驅(qū)動橋系統(tǒng)結(jié)構示意
換擋執(zhí)行機構根據(jù)動力源的不同,可分為氣動、液動和電動3種類型,目前多采用電控電動式。常用的減速機構有蝸輪蝸桿、螺旋機構、齒輪減速機構,運動轉(zhuǎn)換機構有螺旋機構、齒輪齒條機構、凸輪機構、搖臂機構等[6]。為滿足換擋執(zhí)行機構的高精度、小沖擊、能自鎖、短行程等實際要求,并克服凸輪機構等對制造加工精度要求高的問題,本文采用具有自鎖功能的蝸桿傳動作為減速機構、旋轉(zhuǎn)搖臂作為運動轉(zhuǎn)換機構,如圖2所示。換擋電機的輸出扭矩經(jīng)蝸輪蝸桿減速增扭,驅(qū)動搖臂旋轉(zhuǎn),搖臂下端位于撥叉頭凹槽中,將搖臂的旋轉(zhuǎn)運動轉(zhuǎn)化成撥叉的軸向移動,進而由撥叉帶動同步器接合套向目標擋位運動,實現(xiàn)換擋。其中,通過設計蝸桿的螺旋角小于蝸輪蝸桿間的摩擦角來保證自鎖,防止動力反向傳遞,保證換擋可靠性。換擋電機采用可靠性高、壽命長的直流無刷電機,具有響應速度快、起動轉(zhuǎn)矩大的特點,符合換擋過程中撥叉迅速起動或制動的要求[7]。
3 換擋品質(zhì)控制策略
電驅(qū)動橋的換擋過程如圖3所示,包括清扭矩階段、摘擋階段、同步調(diào)速階段、掛擋階段以及恢復扭矩階段。在摘擋后期,驅(qū)動電機開始主動同步調(diào)速。
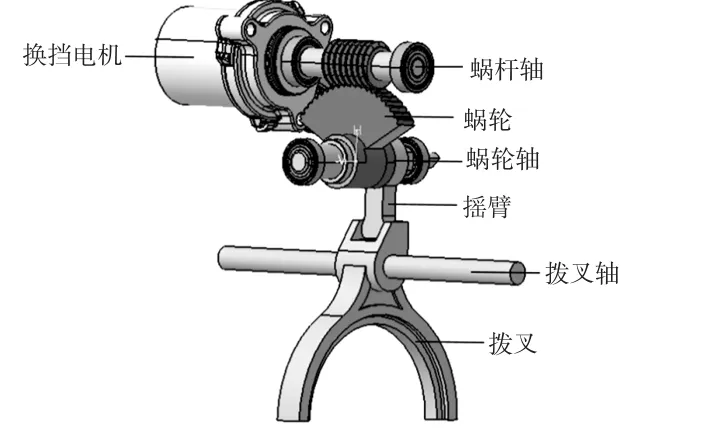
圖2 換擋執(zhí)行機構
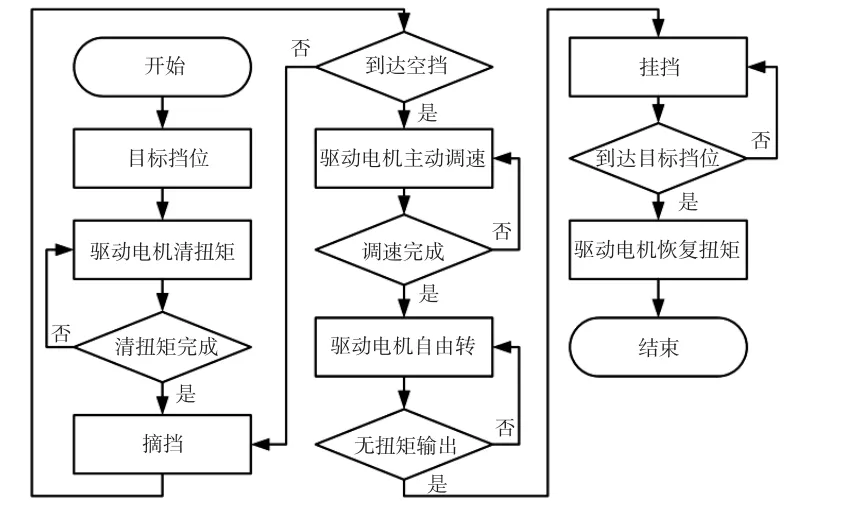
圖3 換擋流程
3.1 清扭矩階段
收到換擋指令后,在摘擋前通過清除驅(qū)動電機扭矩,保證動力系統(tǒng)無轉(zhuǎn)矩傳遞,使換擋執(zhí)行機構較容易摘入空擋,避免引起沖擊和噪聲。此階段對車輛沖擊度影響較大,沖擊度是評價換擋品質(zhì)的重要指標,反映車輛行駛的平順性,用車輛縱向加速度的變化率表示:

式中,a為車輛的縱向加速度;v為車輛速度。
清扭矩階段驅(qū)動電機的動力輸出與車輪端有確定的動力學關系,沖擊度可表示為[8]:

式中,ig為擋位速比;i0為雙行星排減速比;ηt為傳動效率;δ為旋轉(zhuǎn)質(zhì)量換算系數(shù);m為車輛質(zhì)量;r為車輪半徑;Tm為驅(qū)動電機扭矩。
由式(2)可知,清除扭矩階段車輛的沖擊度與驅(qū)動電機的扭矩變化率成正比關系,如果驅(qū)動電機扭矩直接清零,會產(chǎn)生較大的沖擊度,影響駕駛的平順性。因此,清扭矩階段應限制驅(qū)動電機扭矩變化率,抑制沖擊度:

由式(3)可得:

式中,jmax為最大可接受沖擊度。
德國對沖擊度的推薦值為jmax=10 m/s3,中國對沖擊度的推薦值為jmax=17.63 m/s3,取jmax=10 m/s3得到滿足沖擊度要求的驅(qū)動電機扭矩最大變化速率[9]。在摘擋前,驅(qū)動電機以扭矩模式按照上述扭矩變化速率將驅(qū)動電機扭矩減小到零,完成清扭矩過程。
3.2 摘擋階段
清除驅(qū)動電機扭矩后,換擋執(zhí)行機構產(chǎn)生動作帶動撥叉移動,使同步器到達空擋位置。此時,驅(qū)動電機轉(zhuǎn)矩為零且動力鏈中斷,沖擊度為零。為了減小換擋時間,執(zhí)行機構以最大速度進行摘擋。
3.3 同步調(diào)速階段
摘擋完成后,通過調(diào)節(jié)驅(qū)動電機的轉(zhuǎn)速減小同步器主、從動部分的轉(zhuǎn)速差,調(diào)速后的電機轉(zhuǎn)速會直接影響同步器機械同步過程,需向驅(qū)動電機發(fā)送合適的目標調(diào)速指令,控制同步器兩端的轉(zhuǎn)速差。由于無動力輸出,調(diào)速階段時間過長會導致駕駛員感到整車動力性不足,需盡量縮短調(diào)速時間,減小動力中斷時間。
驅(qū)動電機調(diào)速的目標轉(zhuǎn)速為:

式中,noutshaft為電驅(qū)動橋輸出軸轉(zhuǎn)速;itarget為目標擋位傳動比;Δn為轉(zhuǎn)速修正量,考慮到驅(qū)動電機調(diào)速完成到同步器開始機械同步的過程中驅(qū)動電機轉(zhuǎn)速有所下降,取Δn=50 r/min[10]。
為了縮短調(diào)速時間,與通常摘擋完成到達空擋才開始驅(qū)動電機主動調(diào)速不同,本文提出一種“重疊同步調(diào)速”的控制方法,如圖4所示。以2擋摘空擋為例,接合套與接合齒圈分離后,在同步器向空擋移動過程中就重疊地進行驅(qū)動電機主動調(diào)速,由換擋控制器向驅(qū)動電機發(fā)出調(diào)速模式指令和上述目標轉(zhuǎn)速,以縮短換擋時間。
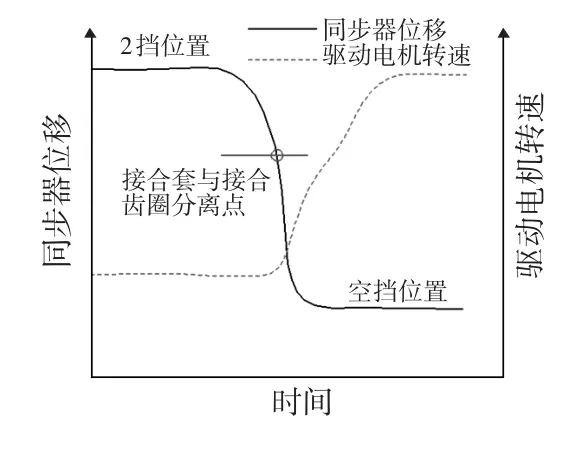
圖4 驅(qū)動電機重疊同步調(diào)速示意
3.4 掛擋階段
調(diào)速完成后,控制驅(qū)動電機進入自由轉(zhuǎn)模式,保證動力系統(tǒng)無轉(zhuǎn)矩傳遞,利于掛擋完成,同時,換擋電機開始動作,帶動撥叉向目標擋位軸向運動,完成掛擋動作。掛擋過程中,同步器機械同步階段是影響換擋沖擊度的主要階段,此階段同步器傳遞的扭矩等于摩擦錐面間的摩擦力矩M,即

式中,F(xiàn)為換擋撥叉的軸向力;μ為摩擦因數(shù);R為摩擦錐面平均有效半徑;α為摩擦錐面半錐角。
同步階段車輛的沖擊度為:

由式(6)、式(7)可得:

式中,J為同步器輸出端至車輪端的等效轉(zhuǎn)動慣量。
由式(8)可知,同步器機械同步階段的沖擊度大小與軸向換擋力的變化率成正比。因此,在掛擋階段,在保證快速完成掛擋的同時,應控制好軸向換擋力的變化率,減小同步?jīng)_擊度。
摘擋和掛擋均通過對換擋電機的控制實現(xiàn),為了實現(xiàn)換擋電機的高精度控制,采用三閉環(huán)反饋控制,其控制原理如圖5a所示。其中,位置環(huán)為三閉環(huán)控制器的外環(huán),轉(zhuǎn)速環(huán)為中間環(huán),電流環(huán)為內(nèi)環(huán),電流環(huán)通過控制輸出脈沖寬度調(diào)制(Pulse Width Modulation,PWM)波的占空比來控制換擋電機的輸入電壓,從而控制其電流和轉(zhuǎn)速[11]。
考慮到掛擋過程不同階段同步器運動特性不同,為避免單一控制方法無法適應運動的變化而導致控制效果不理想,將整個掛擋行程根據(jù)同步鎖止點和同步解鎖點分為同步前階段、同步階段以及同步后階段,采用分段閉環(huán)控制,如圖5b所示。同步前階段以同步鎖止點作為目標點,跟隨目標位移曲線進行閉環(huán)控制;同步階段基本占空比保證同步階段換擋力的下限值,同時對輸出占空比的變化率進行限制,以此控制換擋力的變化率,從而控制同步階段的沖擊度;同步后階段與同步前階段類似。
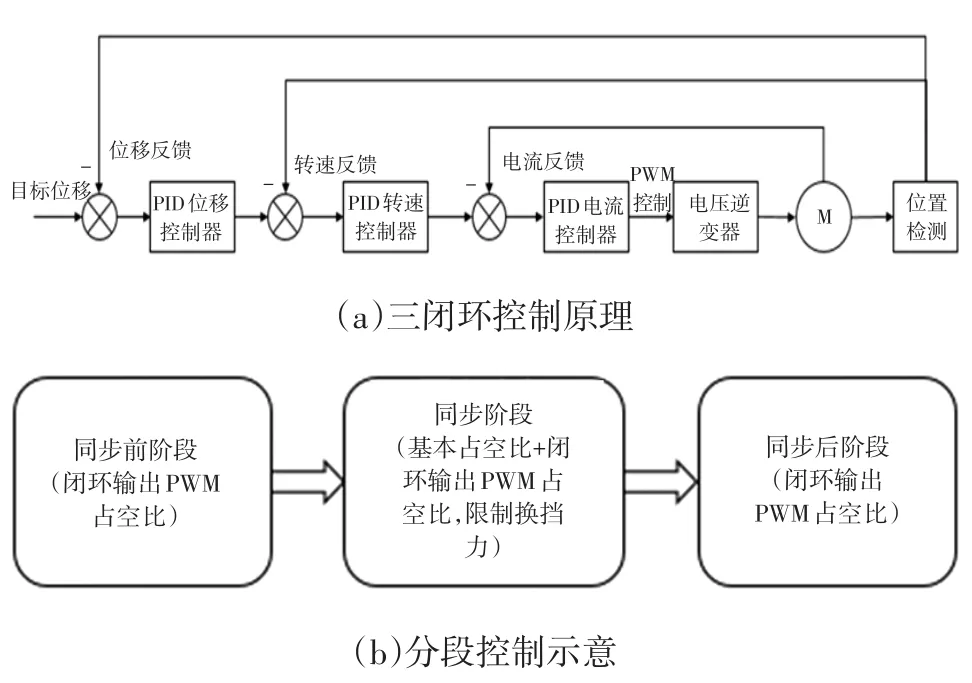
圖5 換擋電機三閉環(huán)分段控制
3.5 恢復扭矩階段
掛擋完成后,驅(qū)動電機切換到轉(zhuǎn)矩模式,此時驅(qū)動電機動力輸出端與車輪間存在與清扭矩階段相同的動力學關系,沖擊度與驅(qū)動電機的扭矩變化率成正比關系。因此,在掛擋完成后,根據(jù)駕駛意圖確定驅(qū)動電機的目標扭矩,按照滿足沖擊度要求的最大驅(qū)動電機扭矩變化率逐漸恢復到目標扭矩。
4 電驅(qū)動橋換擋品質(zhì)控制策略仿真
4.1 電驅(qū)動橋系統(tǒng)AMESim模型
為對控制策略進行測試驗證,本文基于多學科仿真軟件AMESim建立電驅(qū)動橋系統(tǒng)及車輛動力學仿真模型,如圖6所示。采用模塊化設計,包括整車模塊、驅(qū)動電機模塊、齒輪傳動模塊、同步器模塊、換擋執(zhí)行機構模塊,各模塊的主要參數(shù)如表1所示。通過在AMESim模型中加入Simulink接口模塊,其輸出接口代替AMESim模型中的控制信號端口,其輸入接口連接到AMESim模型的傳感器信號端口,從而構成AMESim與Simulink聯(lián)合仿真閉環(huán)模型[12]。

圖6 電驅(qū)動橋系統(tǒng)AMESim模型

表1 仿真模型主要參數(shù)
4.2 控制策略仿真驗證
為了驗證提出的換擋品質(zhì)控制策略的有效性,基于搭建的聯(lián)合仿真模型進行升、降擋仿真測試。為了更明確地體現(xiàn)控制策略的改善效果,以現(xiàn)有換擋控制策略(如文獻[13]中的策略)為基礎,選取摘擋完成后空擋位置開始驅(qū)動電機主動調(diào)速、換擋電機單段閉環(huán)控制的控制方法作為對照組。
4.2.1 升擋過程仿真
升擋過程仿真結(jié)果如圖7所示。
圖7中,擋位狀態(tài)0、1、2、3分別代表空擋、1擋、2擋以及換擋過程中,電機控制模式1、2、3分別代表轉(zhuǎn)矩模式、轉(zhuǎn)速模式和自由轉(zhuǎn)模式。由圖7可知,升擋過程依次經(jīng)過1擋、空擋、2擋,驅(qū)動電機依次經(jīng)過轉(zhuǎn)矩模式、轉(zhuǎn)速模式、自由轉(zhuǎn)模式,最后恢復到轉(zhuǎn)矩模式。同時,升擋過程中,由于存在動力中斷,車速會出現(xiàn)小幅度下降。對照組中,同步器到達空擋位置時,驅(qū)動電機開始調(diào)速,而本文提出的方法在摘擋過程中同步器到達空擋前,驅(qū)動電機已經(jīng)進入調(diào)速模式,通過重疊同步調(diào)速,縮短了換擋時間。本文提出的換擋品質(zhì)控制策略和對照組控制策略的升擋時間分別為0.337 s和0.413 s,升擋過程中的最大沖擊度分別為4.70 m/s3和4.98 m/s3。與對照組相比,提出的控制策略升擋時間縮短18.4%,最大沖擊度降低5.6%。
4.2.2 降擋過程仿真
降擋過程仿真結(jié)果如圖8所示。由圖8可知,降擋過程依次經(jīng)過2擋、空擋、1擋,本文提出的控制策略和對照組控制策略降擋時間分別為0.387 s和0.427 s,降擋過程中的最大沖擊度分別為5.43 m/s3和6.48 m/s3。與對照組相比,提出的控制策略降擋時間縮短9.4%,最大沖擊度降低16.2%。

圖7 升擋過程仿真結(jié)果
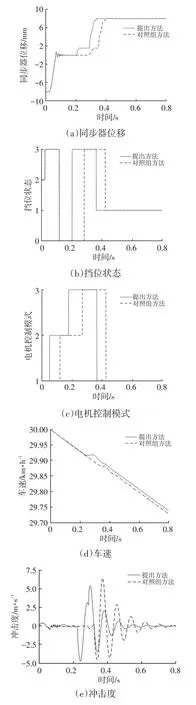
圖8 降擋過程仿真結(jié)果
5 結(jié)束語
本文設計了一種同軸兩擋電驅(qū)動橋的動力系統(tǒng)構型,在對其換擋過程和影響換擋品質(zhì)的因素進行分析的基礎上,提出了改善換擋品質(zhì)的控制策略。利用AMESim搭建了電驅(qū)動橋系統(tǒng)的換擋仿真模型,并與Simulink聯(lián)合仿真對換擋控制策略進行了驗證。結(jié)果表明,提出的換擋品質(zhì)控制策略與對照組控制策略相比,升、降擋時間和最大沖擊度均有較大幅度下降,換擋品質(zhì)得到有效改善。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
