并聯混合動力汽車BSG控制策略研究*
2019-07-19 05:36:58宋大鳳高福旺曾小華陳慧勇王印束
汽車技術 2019年7期
宋大鳳 高福旺 曾小華 陳慧勇, 王印束
(1.吉林大學,汽車仿真與控制國家重點實驗室,長春 130025;2.鄭州宇通客車股份有限公司,鄭州 450061)
主題詞:并聯混合動力汽車 皮帶傳動起動/發電一體化電機 調速控制 穩定發電 控制策略
1 前言
隨著能源短缺和環境污染問題日益嚴重,發展新能源汽車成為各國政府和企業的重點方向[1-3]。混合動力汽車因其具有節能潛力大、對電池要求低等優勢成為過渡時期的最佳選擇[4]。其中,并聯混合動力汽車(Parallel Hybrid Electric Vehicle,PHEV)避免了串聯構型能量二次轉換、綜合效率較低的缺陷,且相比混聯式構型結構更加簡單,易于控制。
混合動力汽車由于多動力源的存在,可以發揮出更佳的動力性,在車輛起步階段合理協調各動力源可以縮短車輛起步時間,提高車輛加速品質;同時,在行駛過程中回收制動能量可以保證電池SOC平衡,提高整車的經濟性,這都需要合理的控制策略來協調各動力源。
國內針對BSG起動發動機及發電開展了很多研究:合肥工業大學的徐立強[5]等人建立了BSG驅動仿真模型,并開展了起動助力、加速助力和能量回收等試驗;葉先君[6]等人對比了有無BSG參與下車輛的動力性、經濟性;鄒小松[7]等人根據NEDC工況,利用ECU采集數據設計BSG起動、發電控制策略。
國內針對BSG的研究著眼于部件的實車測試和基于理論工況的BSG控制研究,而沒有系統地提出適用于全工況的BSG控制算法。為解決該問題,本文在某配備起動發電一體機(Integrated Starter and Generator,ISG)的P2構型并聯混合動力汽車上增加BSG,并基于BSG的功能和性能要求,開展了電機及皮帶輪的參數匹配設計,基于MATLAB/Simulink平臺建立了兩段式起動調速控制策略和穩態發電控制策略,以期提高整車動力性能,并搭建試驗樣車開展了道路試驗驗證。
2 動力系統
2.1 車輛構型
本文在某P2+CVT構型的并聯混合動力汽車基礎上提出增加BSG實現P0+P2構型的方案,結構如圖1所示,以實現快速起停和低速發電功能。原并聯混合動力汽車的基本參數如表1所示。
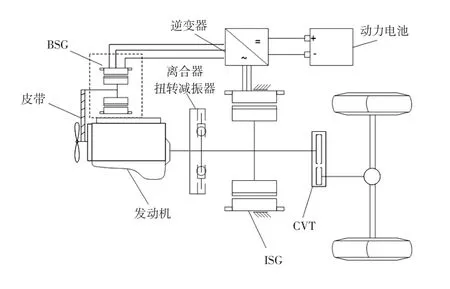
圖1 車輛動力系統構型
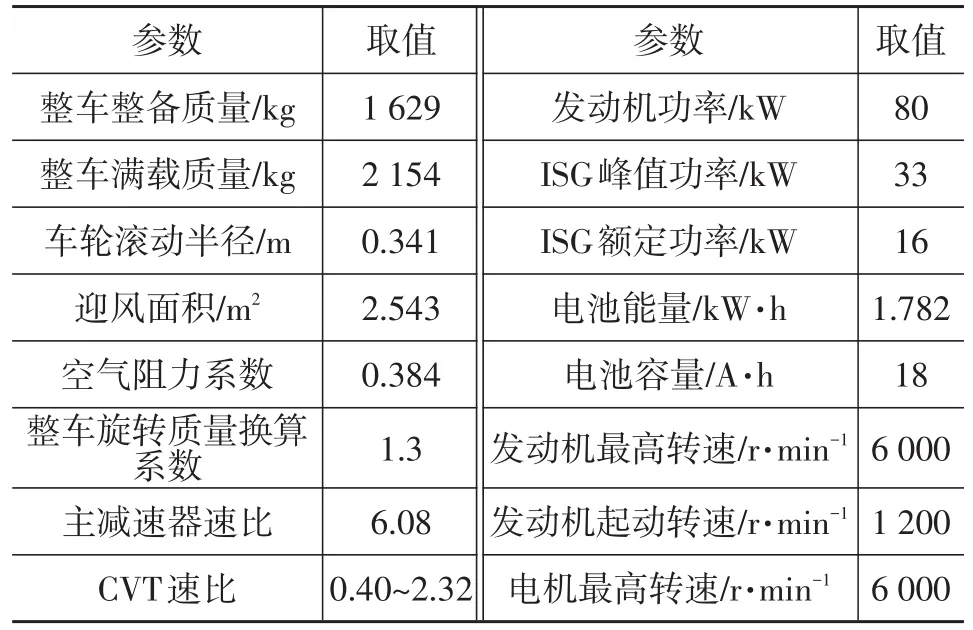
表1 整車參數
在該構型中,BSG的主要功能是起動發動機輔助調速和小功率發電。BSG通過皮帶與發動機曲軸前端相連,與發動機構成BSG-發動機起動發電系統。當BSG起停條件使能時,電機快速響應,通過皮帶傳動輔助發動機快速提速,加快起動調速過程,快速完成同步,使離合器更快接合,從而提高車輛動力性;當BSG發電條件使能時,通過BSG與發動機間的目標轉速/轉矩配合控制,發動機機械能經皮帶傳遞至BSG,電機工作在發電模式為電池充電或為ISG供電,可輔助維持電池SOC穩定,增加純電行駛里程,提高整車經濟性。
2.2 BSG及皮帶輪參數匹配
為實現BSG的選型,需要匹配計算獲得電機峰值功率、額定功率、最大轉矩和最高轉速等參數,同時需要計算皮帶輪速比。皮帶輪速比主要對BSG起到減速增扭的作用,并不改變系統功率等級[8],故匹配計算時可先將BSG與帶輪視為整體,即暫時按速比為1進行電機參數匹配,待計算完成后再根據電機的轉速、轉矩選取合適的帶輪速比。
結合功能需求確定BSG參數匹配計算的原則為:起動發動機時BSG工作于恒轉矩區,以減小其轉矩能力要求;BSG基速點不小于發動機起動目標轉速;BSG最高轉速不小于發動機最高轉速;BSG峰值功率滿足起動發動機的功率需求。
根據以上匹配計算原則,BSG起動發動機時,其轉矩應滿足:

式中,Tm_bsg為BSG峰值轉矩;Ie為發動機曲軸轉動慣量;ne為發動機轉速;Tef為BSG拖動發動機起動時的阻力矩。
為提高并聯系統起動速度,設定BSG在0.3 s內將發動機提速至1 200 r/min,按照恒角加速度計算得到的需求轉矩為61 N·m,即BSG的峰值扭矩不低于61 N·m。
在將帶輪傳動速比與BSG統一考慮的前提下,BSG轉速應滿足:最高轉速不低于發動機最高轉速;額定轉速不小于發動機起動轉速;根據系統發電需求,BSG的高效區應與發動機高效區相匹配,以提高發電效率;最高轉速與基速的比值不能過大,一般在2~4范圍內,即當電機處于最高轉速時,BSG額定轉速不應低于1 500 r/min。
依據上述限定條件,暫定BSG的額定轉速為2 000 r/min,結合峰值扭矩要求,計算可得BSG的峰值需求功率為13 kW。
上述匹配過程將帶輪速比考慮在電機內部,而實際情況下帶輪速比會導致BSG的轉速、轉矩工作點移動[9],如圖2所示。隨著帶輪速比逐漸增大,BSG轉矩需求減小,但其最高轉速和額定轉速需求均有所提高。
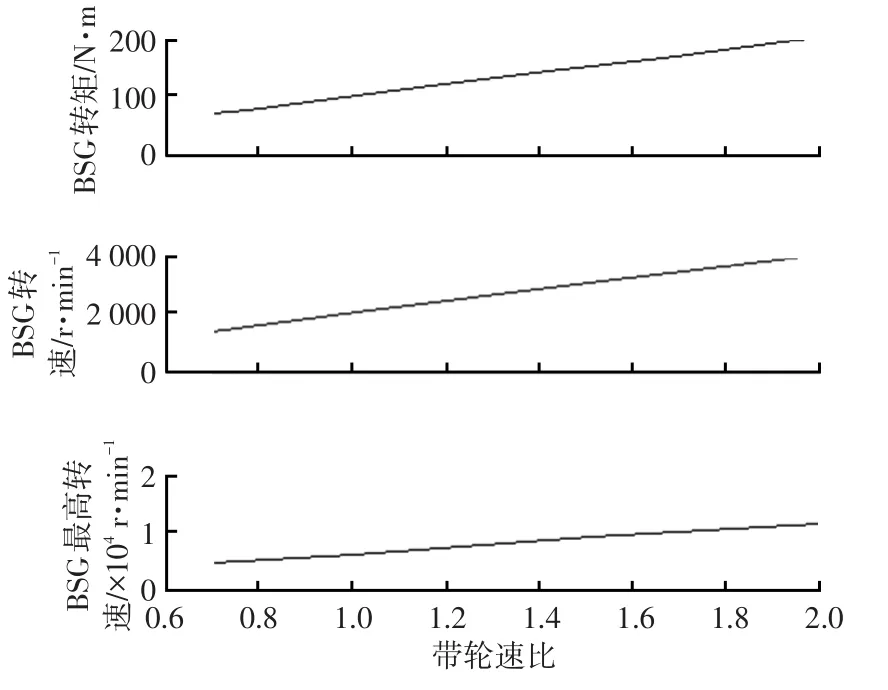
圖2 帶輪速比對BSG轉速、轉矩的影響
結合當前市場上已有產品,選擇的帶輪速比為1.5。BSG的參數匹配結果如表2所示。
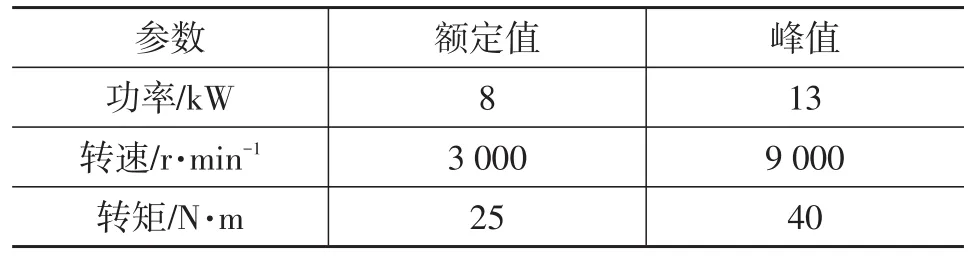
表2 BSG參數初定
3 行駛模式
混合動力汽車是融合了機、電驅動系統于一體的復雜非線性動態系統,需實現各子系統間的統籌協調控制,并優化能量傳遞路徑、提高系統效率。
本文所研究的并聯混合動力SUV可實現12種主要行駛模式,如表3所示。
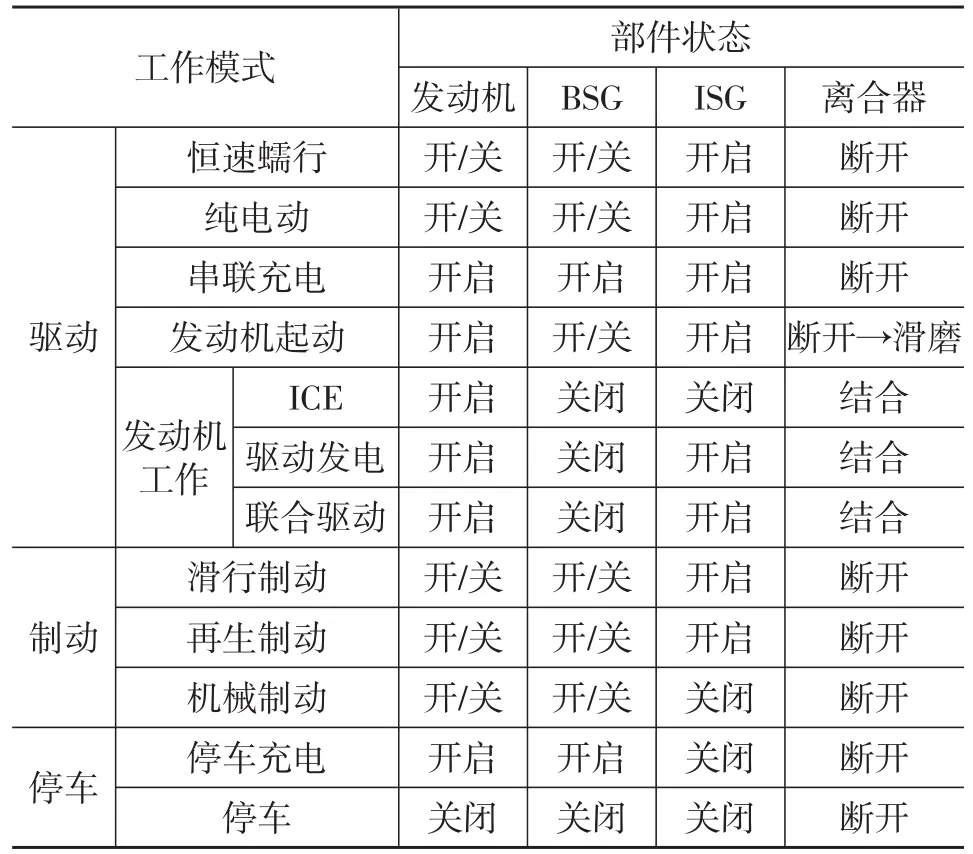
表3 各模式的動力系統主要部件穩態工作狀態
在模式切換的動態過程中,需參考前一模式的部件狀態進行過渡過程協調控制。例如,在聯合驅動模式突然松開油門踏板,車輛將立即進入滑行制動模式。此時應首先控制發動機負荷使其迅速減小,待轉矩清空后斷開離合器,并適時關閉發動機,以保證縱向沖擊較小。同理,在BSG發電過程中若車輛進入其他無需發動機參與的驅動、制動模式,BSG-發動機系統仍需繼續維持穩定發電,以確保電池SOC穩定在合理范圍。
由此,基于Simulink/Stateflow平臺搭建車輛行駛模式仲裁控制算法,定義各行駛模式之間的切換路徑和條件。
4 起動及發電狀態控制
在并聯混合動力汽車基礎上增加BSG后,可實現發動機起動、輔助調速及小功率發電、維持低速純電動行駛等功能。因此需要建立BSG起動發動機調速控制策略以及穩定發電控制策略。
4.1 起動發動機調速控制策略
當行駛車速較高、駕駛員需求轉矩較大或電池SOC較低時,需要發動機工作,以維持電量平衡。由于BSG相比傳統起動機功率更大,可受控調速,所以可縮短發動機起動時間,輔助發動機調速,使離合器主、從動盤快速完成同步,確保發動機動力盡快輸出,進而改善車輛動力性。
依據發動機工作狀態不同,BSG起動發動機控制主要可劃分為提速和調速兩個控制階段:發動機靜止至點火成功為轉速控制階段,其控制目標轉速約為發動機穩定的怠速轉速;發動機點火成功、可自行維持怠速至提速到穩態發電或離合器接合的目標轉速為轉矩控制階段,目標轉矩通過轉速誤差的PID控制計算獲得,此階段發動機處于轉速控制模式,目標轉速為設定的穩態發電轉速或ISG實時反饋轉速。
由此,BSG可迅速響應目標轉速需求,確保車輛快速進入發電狀態或離合器主、從動盤快速完成同步,從而完成起動控制任務。
4.2 穩定發電控制策略
當駕駛員在停車狀態下需要較長時間使用電器或為電池充電時,混合動力控制單元(Hybrid Control Unit,HCU)可控制車輛工作在停車充電模式,其間發動機機械能可經皮帶傳遞至BSG后轉化為電能。同時,當車輛在其他無需發動機參與驅動的工作模式下行駛時,可通過斷開離合器來繼續維持BSG-發動機系統的穩定發電功能,以便實現長距離低速串聯純電動行駛或確保電池SOC穩定。
由此需要在BSG起動發動機后,控制發動機穩定輸出動力,同時控制BSG工作在發電狀態。而當車輛由于駕駛員的不同操作在停車充電、恒速蠕行、純電動、滑行制動、再生制動等行駛模式間切換時,進入新的行駛模式后判斷前一時刻發動機是否處于起動狀態、電池SOC是否低于其最小閾值(30%),滿足相應條件則繼續維持BSG-發動機系統的穩定發電功能,直至電池SOC達到設計充電閾值(85%)或駕駛員的動力需求較大、發動機開始參與驅動為止。
由此,BSG即可快速進入發電控制狀態,且在行駛模式不斷切換過程中,仍能繼續維持穩定發電功能,提高了系統魯棒性。
4.3 整車控制策略
基于以上分析,建立了整車控制策略的Simulink控制算法模型,策略整體架構主要包括信號輸入、信號處理、能量管理(主函數)和信號輸出模塊。其中,能量管理主函數模塊為實現車輛狀態識別、動力及傳動部件控制的主要部分,其又可細分為駕駛員需求解析、故障診斷、系統約束、上下電邏輯、模式仲裁、轉矩分配、附件控制7個主要部分,其中系統約束子模塊依據車輛部件的工作狀態及故障診斷結果,對系統動力輸出進行一定比例的降額功率限制或關閉處理,實現容錯控制,確保車輛安全運行。
5 實車測試
5.1 試驗樣車搭建
基于某配備ISG的P2構型并聯混合動力汽車,參考圖1所示的動力系統構型,改裝獲得試驗樣車,如圖3所示。
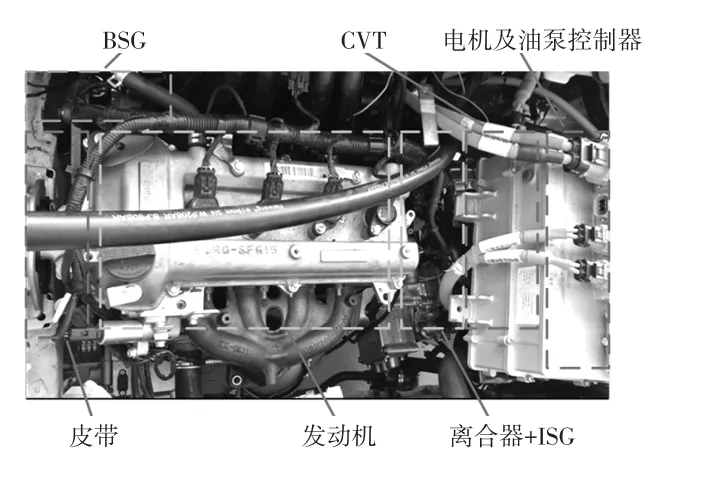
圖3 試驗樣車動力系統布置
基于搭建的控制算法,配合CAN通訊接口,通過自動代碼生成工具編譯下載到德國TTControl公司的TTC200車載控制器作為HCU,并將其掛載到試驗樣車的整車CAN通訊網絡中,與TCU、MCU、EMS及BMS等子控制器共同組成整車控制網絡,同時對車輛行駛模式進行標定,結果如表4所示。
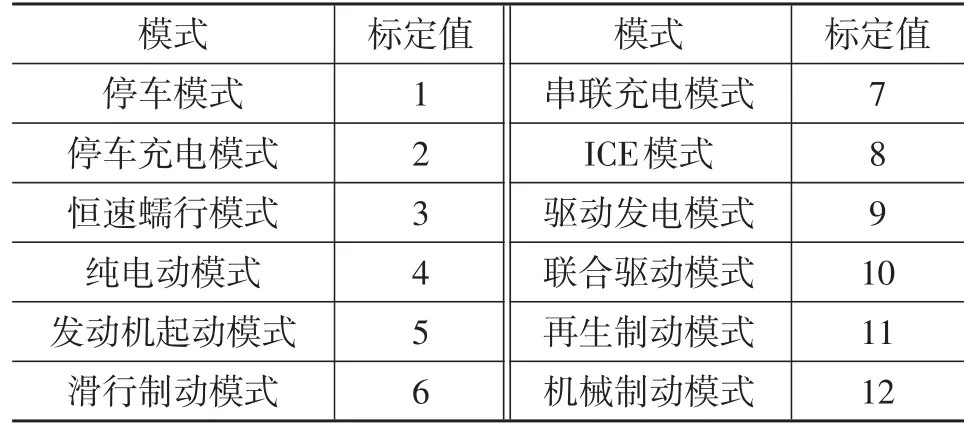
表4 各模式標定結果
5.2 起動調速控制實車測試
基于搭建的試驗樣車,在急加速工況下進行起動調速測試,各主要部件狀態結果如圖4所示。圖4中,離合器狀態0、1和2分別表示斷開、滑磨和接合。
測試期間,車輛從模式1經模式4加速達到一定車速和駕駛員需求轉矩后進入模式5,BSG在轉速控制模式下迅速將發動機轉速提高至起動目標轉速,屬起動調速第一階段;而后發動機點火成功,離合器接合,發動機開始跟隨目標轉速(ISG實時轉速),BSG進入轉矩控制模式進行輔助調速,轉速進一步升高,當轉速差減小到設定閾值以下,離合器開始滑磨,屬起動調速第二階段;在完成轉速同步、離合器接合后整車進入模式8,發動機開始參與驅動車輛行駛。
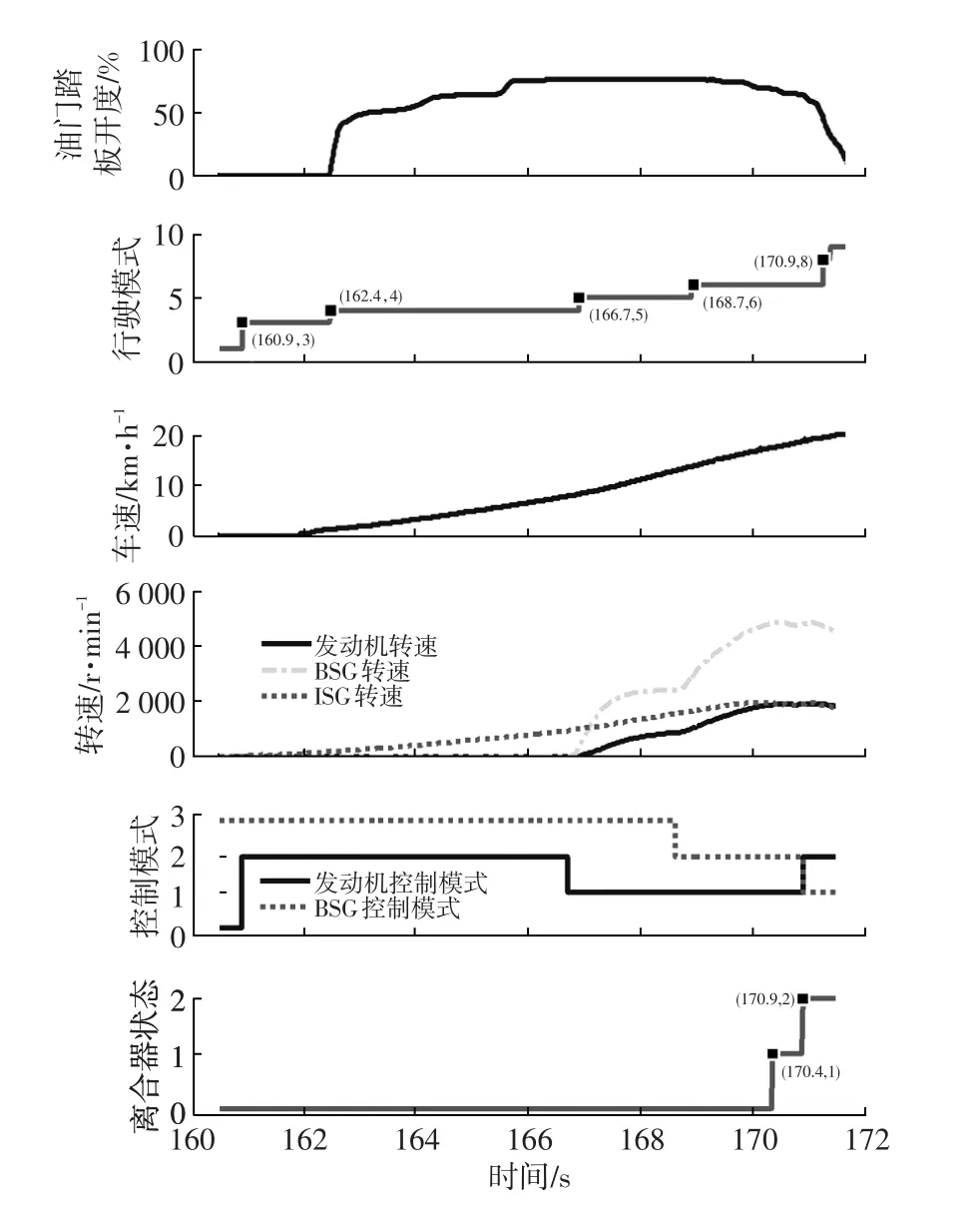
圖4 起動調速控制測試結果
由上述測試結果可見,起動調速控制響應分為明顯的兩個階段,控制效果良好。基于BSG的快速響應,發動機起動時間較短,且實車測試時起動振動和噪聲均較小,有助于改善車輛的動力性。
5.3 穩定發電控制實車測試
當SOC未達到充電閾值上限(85%)開始測試,車輛可在靜止狀態下進入模式2,起動發動機經BSG為蓄電池充電。駕駛員通過擋位與踏板操作進入驅動的相關行駛模式,則在發動機參與驅動前,算法將控制BSG-發動機系統維持穩定發電狀態。如5所示為樣車各主要部件狀態結果。
由圖5可知,雖然車輛行駛模式不斷變化,但BSG工作轉矩基本維持在負值范圍(轉矩波動由皮帶傳動引起),將機械能轉化為電能供給車載電器或為電池充電,其間電池電流時有負值充電狀態。測試期間電池SOC稍有降低是由于加速行駛期間CVT油泵、ISG等耗電功率較大所致。
由此可見,在停車充電模式下機械能經皮帶輪傳遞,蓄電池充電電流約為3 A。當車輛在多個驅動行駛模式間切換時,由ISG實現驅動功能、BSG-發動機系統可以維持發電狀態,有助于改善車輛的SOC維持能力。
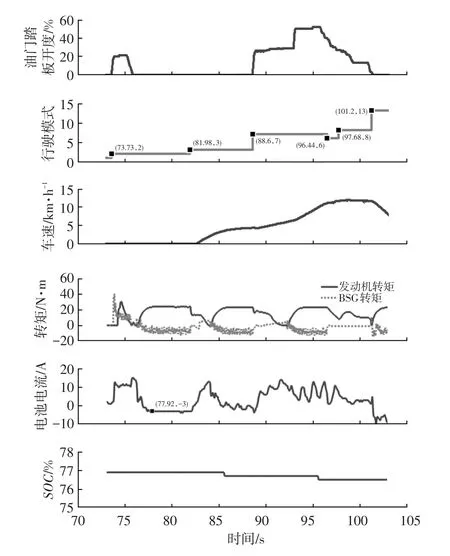
圖5 穩定發電控制測試結果
6 結束語
本文基于P2+CVT的并聯混合動力汽車,提出增加BSG實現P0+P2的混合動力構型方案,并依據參數匹配原則計算獲得了BSG及皮帶輪主要參數,依據系統構型特點定義了車輛行駛模式,依據系統功能需求搭建了起動調速控制策略、穩定發電控制策略和整車控制策略,基于試驗樣車進行了實車測試,結果表明配備BSG的測試樣車具備快速起動調速功能,且在行駛模式不斷切換的過程中BSG-發動機系統可維持穩定發電狀態。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
