基于ZigBee的貝雷橋變形監(jiān)測(cè)研究
2019-07-20 09:39:30鐘勝華鄧樹密
四川建筑 2019年6期
鐘勝華,何 鳳 ,鄧樹密
(1. 成都交投智慧停車產(chǎn)業(yè)發(fā)展有限公司,四川成都 610042; 2.中國(guó)水利水電第十工局有限公司, 四川成都 610072)
為保證橋梁運(yùn)營(yíng)安全,運(yùn)營(yíng)過(guò)程中橋梁撓度和橋墩水平位移監(jiān)測(cè)至關(guān)重要。傳統(tǒng)意義上的工程變形監(jiān)測(cè)通常采用水準(zhǔn)儀、全站儀、激光撓度儀等方法人工操作,費(fèi)時(shí)費(fèi)力,并且數(shù)據(jù)處理結(jié)果在時(shí)間上具有一定的滯后性。相關(guān)研究表明,基于智能型測(cè)量的變形監(jiān)測(cè)系統(tǒng)具有自動(dòng)化程度高、實(shí)用性強(qiáng)、高效、準(zhǔn)確、實(shí)時(shí)等特點(diǎn)。并且,測(cè)量人員可以在計(jì)算機(jī)上開(kāi)發(fā)特定需求的軟件,實(shí)現(xiàn)對(duì)工程變形體的自動(dòng)變形監(jiān)測(cè)[1-3]。本文結(jié)合錦城廣場(chǎng)P+R地下停車場(chǎng)項(xiàng)目2×21 m貝雷梁的自動(dòng)變形監(jiān)測(cè)工程實(shí)例,對(duì)基于ZigBee技術(shù)傳輸技術(shù)、系統(tǒng)組成和實(shí)現(xiàn)方法等方面進(jìn)行了詳細(xì)的研究和探討。
1 工程實(shí)例
1.1 工程概況
P+R地下停車場(chǎng)項(xiàng)目位于繞城高速以北、錦悅東路以南、天府大道以東、繞城高速天府收費(fèi)站以西,為地鐵29號(hào)線、16號(hào)線、18號(hào)線換乘綜合樞紐,并以地下通道與地鐵1號(hào)線錦城廣場(chǎng)站相連。該橋全長(zhǎng)為2×21m=42m,橋面寬為9 m(2.5 m寬人行道+4.0 m寬車行道+2.5 m寬人行道),由13片加強(qiáng)型貝雷梁組成。橋面分配梁采用I28a工字鋼,間距75 cm。橋面分配梁上方通過(guò)縱向10號(hào)槽鋼對(duì)扣焊接,橫橋向間距25 cm,最上層為1 cm厚花紋鋼板。貝雷梁支撐在下橫梁(雙拼45號(hào)工字鋼)上,其中0#、1#采用φ630×10鋼管樁,2#支撐在條形基礎(chǔ)上。橋梁立面見(jiàn)圖1,平面見(jiàn)圖2。
2 監(jiān)測(cè)系統(tǒng)結(jié)構(gòu)
貝雷梁無(wú)線監(jiān)測(cè)系統(tǒng)主要利用ZigBee技術(shù),通過(guò)使用位移傳感器采集貝雷梁撓度和橋墩的水平位移數(shù)據(jù),對(duì)貝雷梁進(jìn)行實(shí)時(shí)在線監(jiān)測(cè)。貝雷梁無(wú)線監(jiān)測(cè)系統(tǒng)主要包括無(wú)線傳感器、路由器、協(xié)調(diào)器、設(shè)備、短信報(bào)警設(shè)備和監(jiān)測(cè)軟件。無(wú)線傳感器主要包括LTDV位移傳感器采集撓度和水平位移。無(wú)線傳感器設(shè)備將采集的數(shù)據(jù)通過(guò)無(wú)線射頻模塊發(fā)送至路由

圖1 貝雷梁立面

圖2 貝雷梁平面
器,路由器將接收數(shù)據(jù)轉(zhuǎn)發(fā)至協(xié)調(diào)器,協(xié)調(diào)器將接收的數(shù)據(jù)通過(guò)RS232 串口傳輸至GRPS設(shè)備,GRPS設(shè)備通過(guò)ZigBee網(wǎng)絡(luò)將數(shù)據(jù)送至監(jiān)測(cè)軟件中,進(jìn)行數(shù)據(jù)顯示,存儲(chǔ)和報(bào)警。智能監(jiān)測(cè)系統(tǒng)測(cè)點(diǎn)安裝快捷便利,該系統(tǒng)通過(guò)無(wú)線接收數(shù)據(jù),實(shí)時(shí)監(jiān)測(cè)警報(bào)系統(tǒng)做到歷史監(jiān)測(cè)數(shù)據(jù)可查,操作簡(jiǎn)便,功能直觀,提高了工作效率。其功能構(gòu)成示意圖見(jiàn)圖3。傳感器系統(tǒng)包括:LTDV位移變形測(cè)量測(cè)量范圍:0~5 cm,分辨力可達(dá)0.01 mm,精度為0.01 mm。通信設(shè)備包括:通信基站和通信中繼站;軟件系統(tǒng)包括:數(shù)據(jù)庫(kù)軟件和監(jiān)測(cè)軟件。見(jiàn)圖4~圖7。
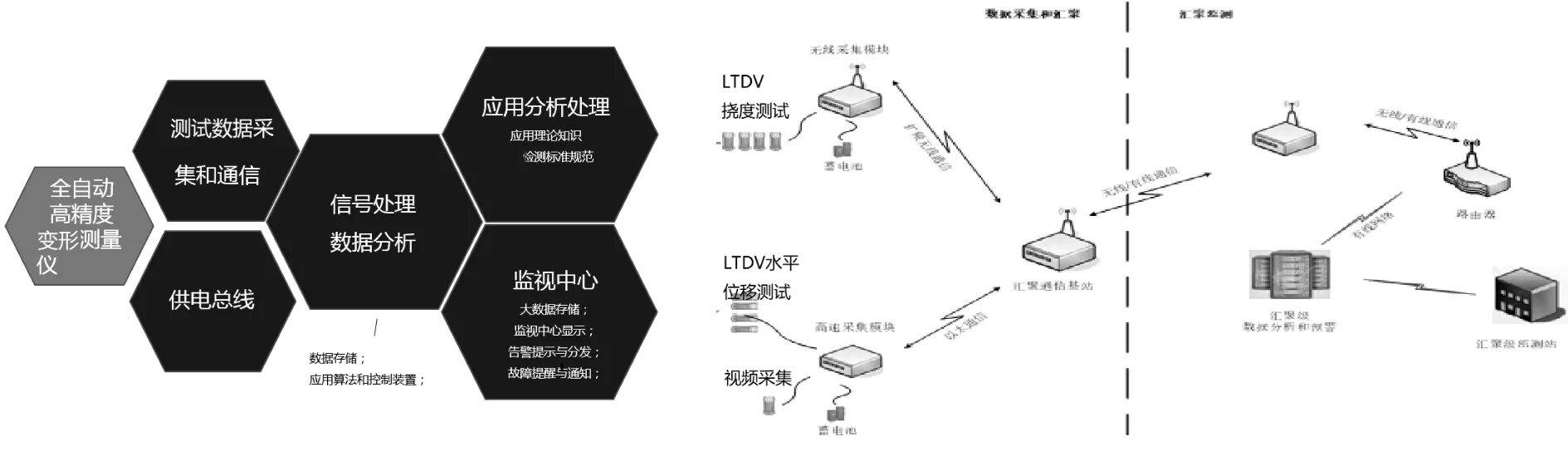
圖3 貝雷梁變形在線檢測(cè)系統(tǒng)構(gòu)成
3 監(jiān)測(cè)方案
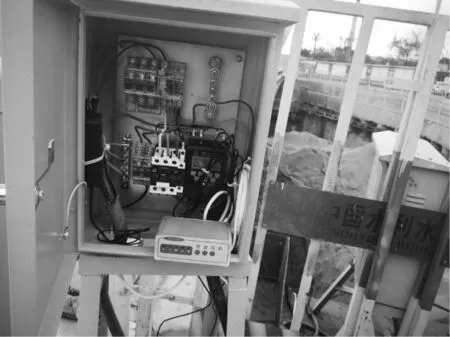
圖4 無(wú)線通訊基站設(shè)備

圖5 通訊天線、攝像頭 和告警喇叭

圖6 現(xiàn)場(chǎng)主機(jī)安裝

圖7 無(wú)線通訊基站設(shè)備
3.1 監(jiān)測(cè)項(xiàng)目及安裝
監(jiān)測(cè)項(xiàng)目的選取遵循傳感器實(shí)時(shí)監(jiān)測(cè)的原則,監(jiān)測(cè)內(nèi)容能覆蓋結(jié)構(gòu)評(píng)估的要求。根據(jù)以上原則,考慮到支架結(jié)構(gòu)特點(diǎn)并結(jié)合支架實(shí)際運(yùn)營(yíng)狀況,長(zhǎng)期監(jiān)測(cè)系統(tǒng)的監(jiān)測(cè)項(xiàng)目見(jiàn)表1。測(cè)點(diǎn)布置見(jiàn)圖8。

表1 監(jiān)測(cè)項(xiàng)目

圖8 測(cè)點(diǎn)布置
3.2 監(jiān)測(cè)頻率
高支模監(jiān)測(cè)時(shí)間為錨桿支護(hù)施工開(kāi)始至錨桿支護(hù)完畢。監(jiān)測(cè)頻率為每10 min/次 。
3.3 監(jiān)測(cè)閥值確定
采用Midas Civil建立空間有限元模型,模型中均為梁?jiǎn)卧?jì)算跨徑為21 m,采用加強(qiáng)型貝雷梁(上下弦桿加強(qiáng)),橋跨為9 m,共13片加強(qiáng)型貝雷梁。橋面通過(guò)I28a工字型分配梁與貝雷梁連接。貝雷片通過(guò)下層雙拼的I45工字鋼,傳力到鋼管樁上。人群活載通過(guò)虛擬梁均布加載于全跨,汽車活載通過(guò)分配梁分配到貝雷梁片上。0#、1#支撐在鋼管樁上,并考慮樁土效應(yīng),2#支撐在條形基礎(chǔ)上。全橋共6 834個(gè)節(jié)點(diǎn),10 527個(gè)單元。模型計(jì)算中考慮0#、1#及2#處支撐豎桿采用C10槽鋼進(jìn)行補(bǔ)強(qiáng),除端部采用標(biāo)準(zhǔn)件進(jìn)行各片貝雷梁的拼接外,在車行道下側(cè)的貝雷梁底部采用C10槽鋼進(jìn)行橫向聯(lián)系的加強(qiáng)。計(jì)算中認(rèn)為橋面分配梁與貝雷片可共同傳力(采用U形螺栓連接)。根據(jù)計(jì)算要求,貝雷梁橋需通行100 t汽車荷載。Midas整體計(jì)算模型見(jiàn)圖9所示,在活載作用下的桿件變形圖見(jiàn)圖10。
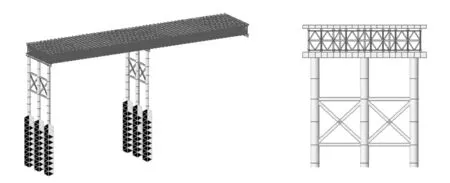
圖9 Midas Civil 整體計(jì)算模型
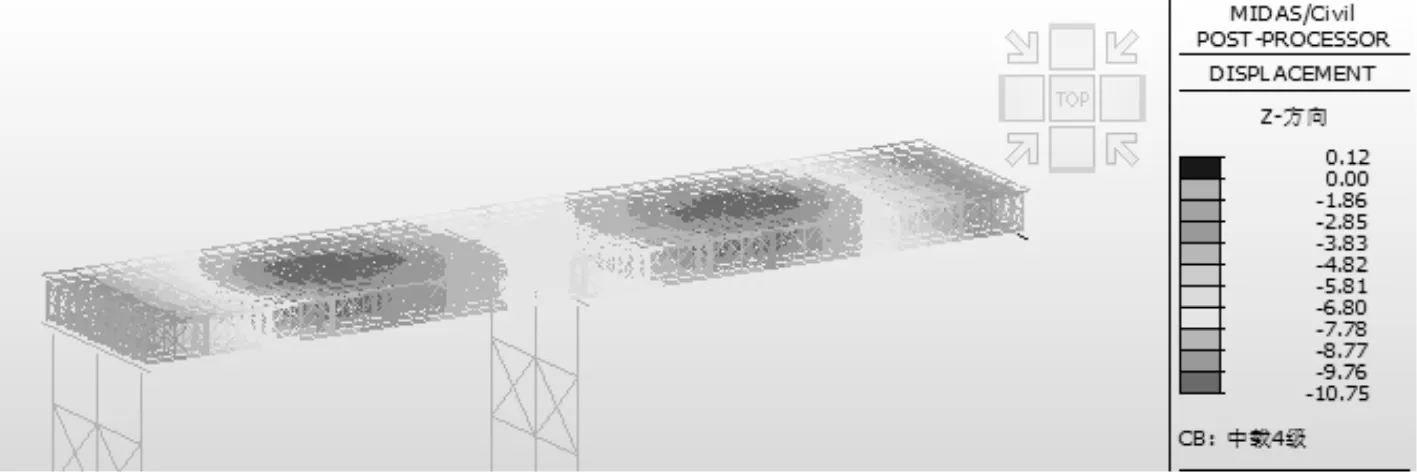
(a)變形圖1
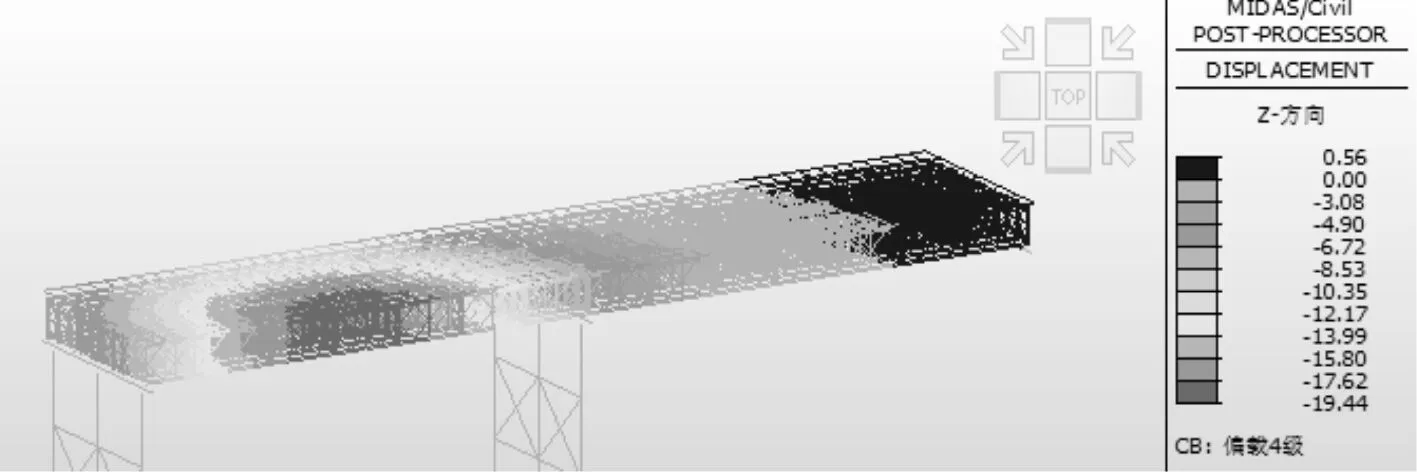
(b)變形圖2圖10 活載作用下貝雷梁變形
本文將貝雷梁監(jiān)測(cè)系統(tǒng)進(jìn)行位移分級(jí)、分目標(biāo)預(yù)警,對(duì)每一監(jiān)測(cè)方向,采用分級(jí)預(yù)警方式。一級(jí)預(yù)警值設(shè)立原則為貝雷梁所承受荷載超設(shè)計(jì)荷載100 %,二級(jí)預(yù)警值設(shè)立原則為鋼管腳手架所承受荷載達(dá)到支架極限荷載80 %。根據(jù)有限元計(jì)算結(jié)果,以上臨界荷載值所對(duì)應(yīng)貝雷梁撓度和橋墩的縱向水平位移。應(yīng)變閥值確定按照構(gòu)件在活載最不利荷載組合下,撓度為30 mm,水平位移閥值取為2 mm。當(dāng)監(jiān)測(cè)項(xiàng)目超過(guò)其警戒值時(shí),必須迅速停止車輛運(yùn)行,查明原因后方可繼續(xù)運(yùn)行。
4 監(jiān)測(cè)結(jié)果及分析
為了分析貝雷梁撓度和墩頂水平位移,對(duì)貝雷梁和橋墩安裝了4個(gè)LTDV位移傳感器進(jìn)行監(jiān)測(cè)。現(xiàn)場(chǎng)測(cè)試軟件顯示如圖11所示。通過(guò)連續(xù)監(jiān)測(cè)1個(gè)月見(jiàn)表2。

圖11 貝雷梁撓度現(xiàn)場(chǎng)測(cè)試
通過(guò)連續(xù)監(jiān)測(cè)貝雷梁撓度,貝雷梁測(cè)點(diǎn)應(yīng)變?cè)谝惶?4 h內(nèi)(2019-8-19),在運(yùn)行條件下的最大撓度25.6 mm,橋墩水平位移為2.92 mm,均小于安全預(yù)警值,表明橋梁結(jié)構(gòu)在車輛荷載作用下結(jié)構(gòu)處于正常工作狀態(tài)。同時(shí),結(jié)合圖9可知,在3個(gè)月的監(jiān)測(cè)周期內(nèi),撓度和水平位移峰值(最大撓度峰值為39 mm,最大水平位移3.21 mm)超過(guò)安全預(yù)警值,通過(guò)視頻發(fā)現(xiàn),有超載車輛通行橋梁并通過(guò)警報(bào)器報(bào)警后,超載車輛退出橋梁卸載后方能通過(guò)橋梁。
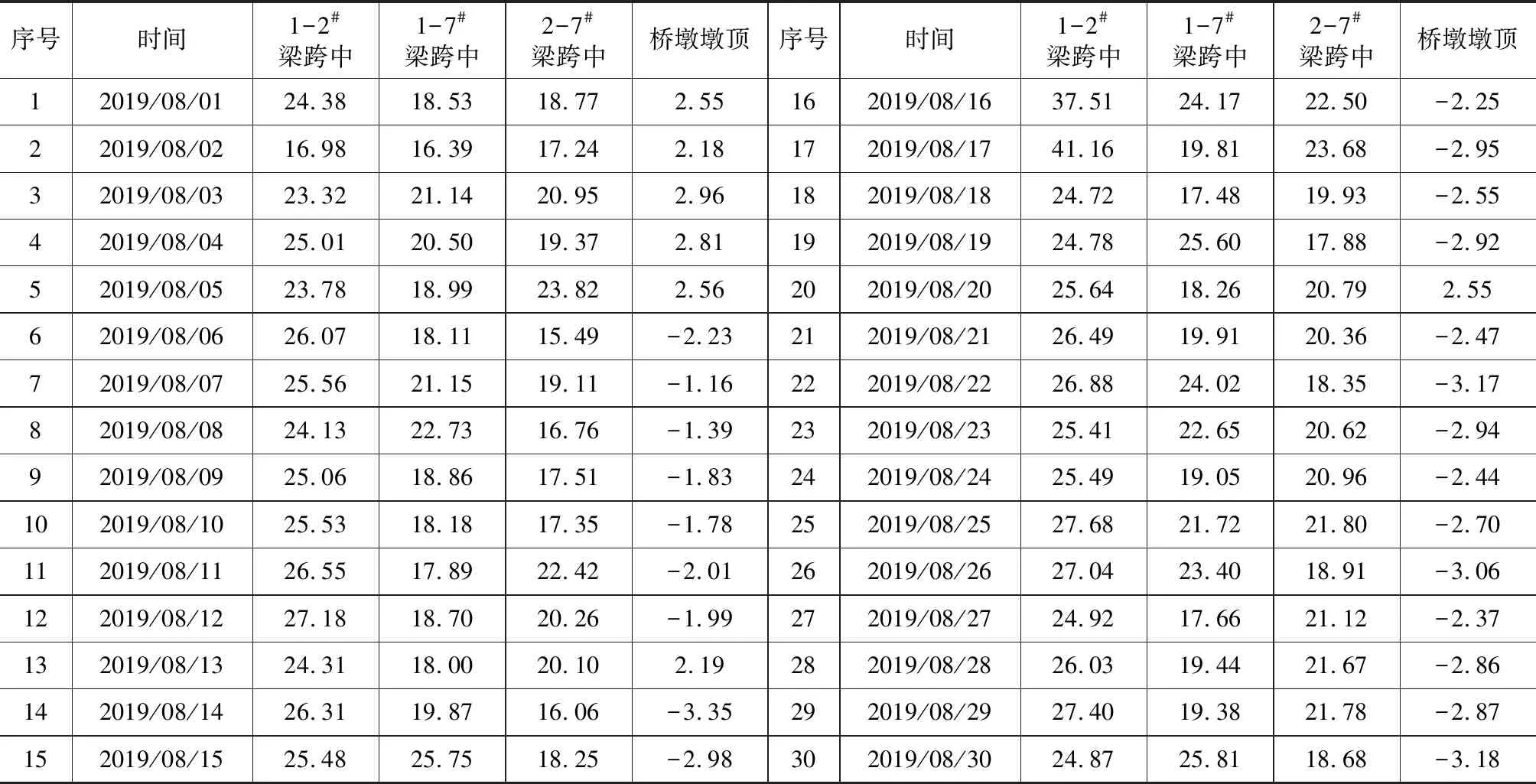
表2 位移監(jiān)測(cè)點(diǎn)日峰值列表 mm
5 結(jié)論
綜上所述,在貝雷橋的安全風(fēng)險(xiǎn)控制過(guò)程中,基于ZigBee技術(shù)研發(fā)的實(shí)時(shí)監(jiān)測(cè)警報(bào)系統(tǒng)能有效監(jiān)測(cè)位移狀態(tài),該系統(tǒng)成功運(yùn)用于實(shí)際項(xiàng)目中,具有高精度、高效率,且操作簡(jiǎn)單,成本可控等優(yōu)點(diǎn),值得推廣運(yùn)用。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年4期)2019-04-22 03:28:24
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
