康復步行訓練機器人位置和速度跟蹤誤差同時約束的安全預測控制
2019-07-22 04:38:54孫平張帥
電機與控制學報 2019年6期
孫平 張帥

關鍵詞:康復步行訓練機器人;跟蹤誤差約束;安全預測控制;二次規(guī)劃
DOI:10.15938/j.emc.2019.06.000
中圖分類號文獻標志碼:A 文章編號:1007 -449X(2019)06 -0000 -00
Abstract:A rehabilitative training walker needs to track trajectory which is prescribed by doctors so that it can help rehabilitee train.The design scheme of a safe predictive controller is proposed while simultaneously considering the safety of the rehabilitees,extensive motion position and velocity tracking errors during training.The ultimate aim is to realize robots trajectory tracking and velocity tracking simultaneously for arbitrary initial position,and restrict tracing errors within prescribed range in order to increase the safety of the system.The predictive model with incremental control is established by discretizing kinetics model of the rehabilitative training walker.In predictive timedomain,the performance index of trajectory tracking errors is designed and the constraint conditions of tracking errors are structured.The predictive control of satisfying the constraint conditions of tracking errors is obtained by designing auxiliary motion trajectory and solving quadratic program with incremental control.The simulation and experiment results show the feasibility and superiority of the proposed control method with position and velocity tracking errors simultaneous constraints.
Keywords:rehabilitative training walker;tracking errors constraints;safe predictive control;quadratic program
0 引 言
隨著高齡人口增加和步行障礙患者增多,僅依靠理療醫(yī)生無法完成繁重的步行康復訓練任務,因此康復步行訓練機器人得到了極大發(fā)展[1-4]。步行訓練機器人通常需要跟蹤醫(yī)生指定的運動軌跡,幫助患者康復訓練,近年來,研究者們提出了多種跟蹤控制方法,如解決重心偏移和負載變化的自適應控制[5];執(zhí)行器故障時的冗余安全控制[6];提高軌跡跟蹤精度的模糊滑模控制[7]等等。上述控制方法均以實現(xiàn)機器人軌跡跟蹤或速度跟蹤為目的,無法實現(xiàn)軌跡和速度同時跟蹤,且沒有考慮機器人的運動位置和速度約束。
與工業(yè)機器人不同,康復機器人與患者接觸,運動位置和速度對保證康復者的安全具有重要意義。如果速度狀態(tài)超過患者承受能力,將導致患者與機器人運動不協(xié)調(diào)而再次受傷;位置狀態(tài)超出空間環(huán)境限制,機器人可能會碰撞周圍人或物體。由此可見,不約束運動位置和速度對患者來講是極其不安全的。事實上,由于機械系統(tǒng)的狀態(tài)受到限制,會導致系統(tǒng)性能的下降[8-9]。如約束運動位置,難以實現(xiàn)速度跟蹤;約束運動速度,不能保證實時跟蹤運動位置。文獻[10]利用飽和函數(shù)約束了康復機器人的運動速度,控制器通過增加補償使機器人實現(xiàn)了軌跡跟蹤,不僅控制器設計復雜,而且不能同時約束機器人的運動位置。文獻[11]通過直接構造康復機器人系統(tǒng)的漸近穩(wěn)定約束條件,限制了機器人的運動速度,但無法進一步實現(xiàn)運動位置約束。文獻[12-13]通過建立有界Lyapunov函數(shù)(Barrier Lyapunov Function)限制了系統(tǒng)的狀態(tài),然而,結構復雜的控制器僅能處理單一狀態(tài)變量約束。
另外,康復機器人幫助患者訓練時,可以從任意初始位置開始運動,初始條件將直接影響康復機器人對醫(yī)生指定訓練軌跡的跟蹤精度。文獻[14-15]分別研究了提高暫態(tài)跟蹤性能和零跟蹤誤差的控制方法;文獻[16]采用凸優(yōu)化方法研究了誤差受限跟蹤控制問題。然而,上述方法均假設初始跟蹤誤差滿足約束范圍,無法解決初始誤差超過約束范圍的狀態(tài)受限問題。
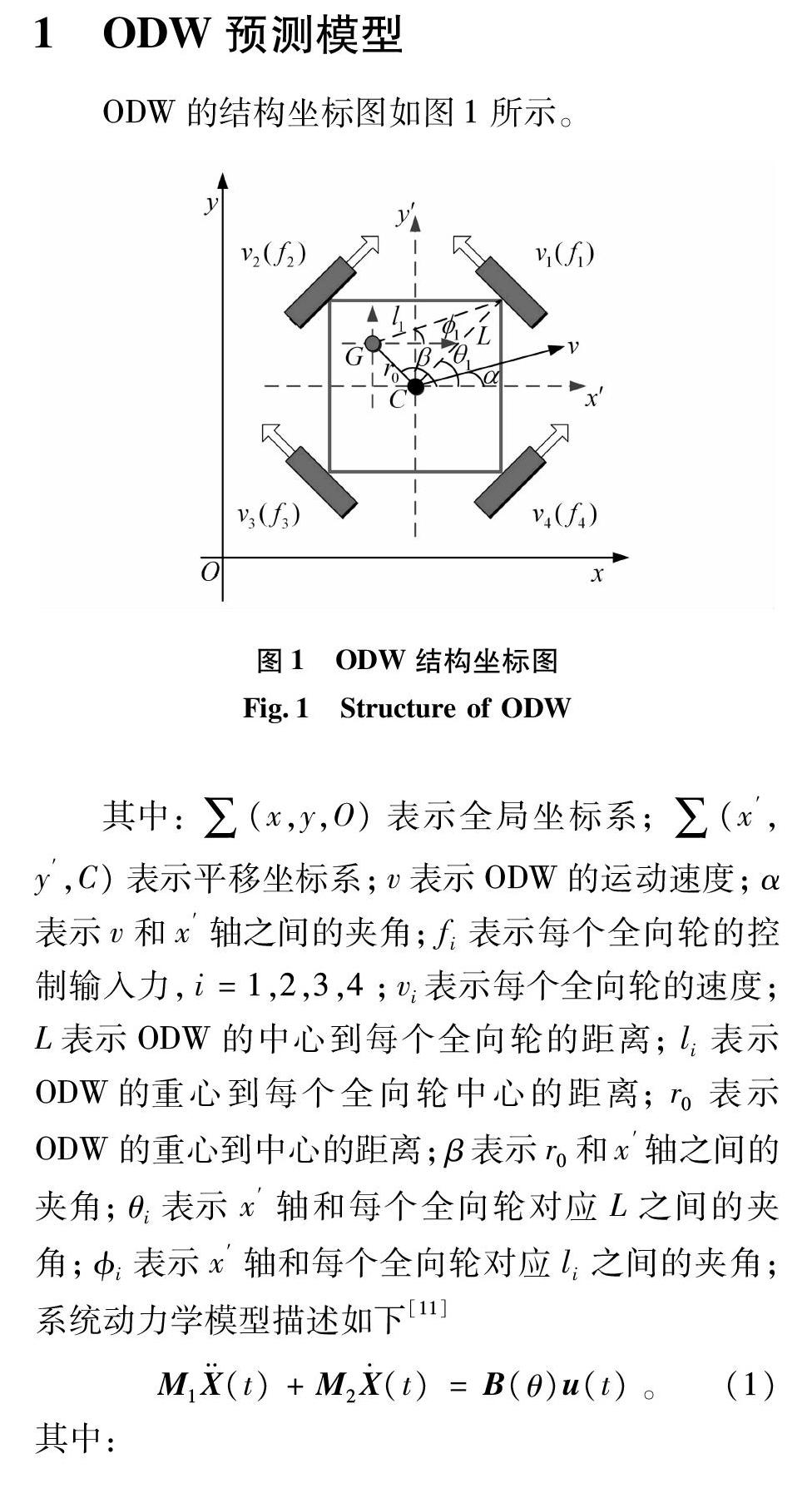
近年來,模型預測控制在處理系統(tǒng)約束問題中得到了廣泛應用[17-18],由于同時約束康復機器人系統(tǒng)的運動位置和速度,需要建立6個約束條件,如何求解滿足這些約束條件的預測控制器,具有一定難度。鑒于此,本文針對一種全方向康復步行訓練機器人(omnidirectional rehabilitative training walker,ODW)[19]提出了安全預測控制方法,確保ODW從任意位置出發(fā),都能同時約束其運動位置和速度跟蹤誤差,完成的主要工作有:
1)將ODW動力學模型進行離散化,建立了具有控制增量形式的預測模型。
2)設計了軌跡跟蹤誤差性能優(yōu)化指標,建立了跟蹤誤差約束條件,并把滿足約束條件的性能優(yōu)化問題,轉化為求解控制增量的二次規(guī)劃問題。
3)給出了輔助運動軌跡的構造方案,保證ODW從任意位置出發(fā),都能獲得安全預測控制。
4)通過仿真和實驗研究,驗證了本文提出安全預測控制方法同時約束位置和速度跟蹤誤差的有效性和優(yōu)越性。
5 結 論
研究了全方向康復步行訓練機器人運動位置和速度跟蹤誤差同時受限的跟蹤控制問題。提出了安全預測控制方法,并給出了輔助運動軌跡構造方案,使ODW從任意位置出發(fā)都能同時實現(xiàn)運動軌跡和運動速度跟蹤,且將跟蹤誤差約束在指定范圍,保證了ODW系統(tǒng)運動狀態(tài)的安全性。建立了ODW預測模型及性能優(yōu)化函數(shù),通過求解控制增量形式的二次規(guī)劃問題,獲得了時域內(nèi)滿足誤差約束條件的預測控制。仿真和實驗結果表明了文中提出控制方法的有效性,能保證ODW在安全運動狀態(tài)下幫助康復者步行訓練。文中提出的安全預測控制方法,除了應用于ODW外,對從任意位置出發(fā)需要限制運動狀態(tài)的輪式移動機器人均具有適用性。
參 考 文 獻:
[1] GUO Shuai,JI Jiancheng,MA Guangwei,et al.Lower limb rehabilitation robot for gait training[J].Journal of Mechanics in Medicine and Biology,2014,14(6): 1440004-1.
[2] SAN M D,CESTARI M,AREVALO J C,et al.Generation and control of adaptive gaits in lower limb exoskeletons for motion assistance[J].Advanced Robotics,2014,28(5): 329.
[3] GUO Zhao,YU Haoyong,YUE H Y.Developing a mobile lower limb robotic exoskeletons for gait rehabilitation[J].Journal of Medical Devices,2014,8(12): 044503-1.
[4] JIANG Yinlai,WANG Shuoyu,ISHIDA K,et al.Directional control of an omnidirectional walking support walker: adaptation to individual differences with fuzzy learning[J].Advanced Robotics,2014,28(7): 479.
[5] SUN Ping,WANG Shuoyu.Redundant input safety tracking control for omnidirectional rehabilitative training walker with control constraints[J].Asian Journal of Control,2017,19(1): 116.
[6] TAN Renpeng,WANG Shuoyu,JIANG Yinlai.Adaptive control method for pathtracking control of an omnidirectional walker compensating for centerofgravity shifts and load changes[J].International Journal of Innovative Computing,Information and Control,2011,7(7): 4423.
[7] LIU Quan,LIU Dong,MENG Wei,et al.Fuzzy sliding mode control of a multiDOF robot in rehabilitation environment[J].International Journal of Humanoid Robotics,2014,11(1): 1.
[8] LI Yongming,TONG Shaocheng,LI Tieshan.Adaptive fuzzy outputfeedback control for output constrained nonlinear systems in the presence of input saturation[J].Fuzzy Sets and Systems,2014(248): 138.
[9] HAN S I,LEE J M.Output tracking error constrained robust positioning control for a nonsmooth nonlinear dynamic system[J].IEEE Transactions on Industrial Electronics,2014,61(12):6882.
[10] 孫平.速度受限的全方向康復步行訓練機器人Backstepping補償跟蹤控制[J].信息與控制,2015,44(3): 309.
SUN Ping.Backstepping compensation tracking control for omnidirectional rehabilitative training walker with velocity constraints[J].Information and Control,2015,44(3): 309.
[11] SUN Ping,WANG Shuoyu.Guaranteed cost nonfragile tracking control for omnidirectional rehabilitative training walker with velocity constraints[J].International Journal of Control,Automation and Systems,2016,4(5):1340.
[12] NIU Ben,ZHAO Jun.Output tracking control for a class of switched nonlinear systems with partial state constraints[J].IET Control Theory and Applications,2013,7(4): 623.
[13] NIU Ben,ZHAO Jun.Tracking control for outputconstrained nonlinear switched systems with a barrier Lyapunov function[J].International Journal of System Science,2013,44(5): 978.
[14] YUCELEN T,TORRE G D,JOHNSON E N.Improving transient performance of adaptive control architectures usingfrequencylimited system error dynamics[J].International Journal of Control,2014,87(11): 2383.
[15] ZHANG Zhengqiang,SHEN Hao,LI Ze,et al.Zeroerror tracking control of uncertain nonlinear system in the presence of actuator hysteresis[J].International Journal of System Science,2015,46(15): 2853.
[16] WEI Guoliang,WANG Zidong,SHEN Bo.Errorconstrained finitehorizon tracking control with incomplete measurements and bounded noises[J].International Journal of Robust and Nonlinear Control,2012(22):223.
[17] KARL W,MOHANED W,MEHRE Z,ea al.Model predictive control of nonholonomic mobile robots without stabilizing constraints and costs[J].IEEE Transactions on Control Systems Technology,2016,24(4): 1394.
[18] 王永賓,林輝,計宏.多約束永磁同步電機穩(wěn)定模型預測控制策略[J].電機與控制學報,2011,15(12): 7.
WANG Yongbin,LIN Hui,JI Hong.Stabilizing model predictive control strategy for permanent magnet synchronous motor with multivariable constraints[J].Electric Machines and Control,2011,15(12): 7.
[19] CHANG Hongbin,SUN Ping,WANG Shuoyu.A robust adaptive tracking control method for a rehabilitative walker using random parameters[J].International Journal of Control,2017,90(7): 1446.
[20] 曾志文,盧惠民,張輝,等.基于模型預測控制的移動機器人軌跡跟蹤[J].控制工程,2011(18):80.
ZENG Zhiwen,LU Huimin,ZHANG Hui,et al.Trajectory tracking based on model predictive control for omnidirectional mobile robot[J].Control Engineering of China,2011(18): 80.
(編輯:劉琳琳)
