基于AMESim本體分離式翻車機性能分析
2019-07-25 01:37:50羅國馨吳春明羅應義
商品與質量 2019年6期
關鍵詞:系統
羅國馨 吳春明 羅應義
廣東韶鋼松山股份有限公司 廣東韶關 512000
國內大多電廠使用C型翻車機作為煤粉和礦石的翻卸裝備,主要包括重車調車機、翻車機本體、遷車臺、空車調車機等設備[1-2]。翻車機本體完成敞車的夾持定位、翻轉和卸料工作,為翻車機的關鍵環節,夾持定位由液壓系統實現,翻轉卸料采用變頻器控制電機[3-5],設備的平穩性和工作效率大幅提升。
翻車機的工作環境粉塵多、翻轉過程中存在振動,導致液壓元件的卡滯和管接頭松動滲油,除塵水會進入液壓系統,而油箱翻轉加速油液乳化,嚴重縮短了液壓元件的壽命,導致液壓系統失效,甚至出現翻車機的掉道等重大事故[6-8]。針對這一現狀,某廠首次提出了將翻車機本體液壓系統油源及主要控制閥組從本體分離的方案,采用高壓軟管將控制閥組與壓車液壓缸與靠車液壓缸油路連通,以減少液壓系統受粉層和除塵水影響。實際的改造過程中,由于連接管道的增長,會加大管路壓力損失,降低系統的響應速度和運動性能等。
1 翻車機本體液壓系統分析
1.1 工作原理介紹
翻車機本體液壓系統主要三部分組成:油源、壓車缸油路、靠車缸油路,主要完成靠車缸和壓車缸的控制[9],如圖1所示。
靠車缸回路:
M型機能三位四通電液換向閥控制靠車缸。在靠車板推出時,電液換向閥處于左位時,靠車缸實現差動連接,加速活塞桿伸出速度;當靠車板伸出至指定位置后,換向閥1處于中位,電磁閥5DT斷電,靠車缸液控單向閥阻止無腔油液流出,換向閥1處于中位,該泵卸荷;當靠車板縮回時,電液換向閥1處于右位時,泵輸出的高壓油進入靠車缸有桿腔,此時電磁換向閥3DT和5DT得電,使靠車缸無桿腔處的液控單向閥反向打開,無桿腔液壓油經換向閥1的B口回油箱。
圖1 翻車機本體液壓系統原理圖
壓車缸回路:
Y型機能三位四通電液換向閥控制壓車缸。壓車板壓下,1DT得電,電液換向閥處于右位,活塞桿縮回;在壓車板壓下后,1DT得電,電液換向閥處于中位,該泵卸荷,此時液壓鎖將出口油路關閉,但4DT得電,液控單向閥反向開啟,隨轉子的翻轉,壓車缸有桿腔壓力逐步升高,至順序閥開啟壓力時,順序閥閥口打開,平衡缸活塞桿伸出,調節有桿腔壓下時最高壓力,在翻車機轉到100°以后,4DT斷電,液控單向閥將有桿腔油口關閉;壓車板松壓時,2DT得電,電液換向閥處于左位,4DT得電,液控單向閥反向開啟,泵輸出的液壓油經換向閥2A口進入壓車缸和平衡缸無桿腔,有桿腔油液經換向閥B口回油箱[7-8]。
1.2 翻車機敞車受力分析
設定在初始狀態,敞車裝滿散料,壓車缸將敞車調整至最低位置,如圖2(a)所示的Y方向受力分解圖。

圖2 壓車在不同狀態下的受力分析

其中:F1——八臺壓車缸的合力;
F2——敞車彈簧的彈簧力;
G1——敞車自身重量;
G2——散料重量;
假定:敞車彈簧壓縮量為h1,壓車缸有桿腔壓力為P1,有桿腔作用面積為A,則:
滿載狀況下,有桿腔的壓力為:

若壓車缸活塞桿位置不變,散料已卸完,如圖2(b)所示。G2=0,有桿腔壓力為P2

空載狀況下,有桿腔的壓力為:

兩種工況狀態時,壓車缸有桿腔壓差ΔP 為

在翻轉過程中,敞車中煤炭質量表達式為[10]:

采用位移傳感器模型實時測量壓車缸活塞桿位移x,根據翻轉角度計算壓車缸受力,受力方程為:

以實際改造的翻車機C64K敞車為例計算,相關的參數如下表1所示:
經計算,壓車缸有桿腔壓力為22MPa,超過壓車缸及液壓元件耐壓值,因此,翻車機采用了平衡缸進行卸壓,當壓車缸有桿腔壓力升至P2時,順序閥閥口打開,有桿腔中部分液壓油排到平衡缸,壓車缸有桿腔壓力降低,并維持在P2,敞車彈簧壓縮量減小Δx,由于平衡缸與壓車缸尺寸相同,此時平衡缸活塞移動距離為8Δx ,但Δx必須小于初始壓下距離,否則,敞車車輪脫離鐵軌上表面,造成脫軌事故,而平衡缸活塞移動距離受順序閥控制。

表1 翻車機C64K敞車相關參數
2 翻車機本體液壓系統仿真分析
通過對翻車機壓車缸部分工作原理和受力進行靜態分析,參照其液壓系統原理,運用AMESim仿真軟件對翻車機本體液壓系統壓車缸回路進行建模,并對其壓車和松壓的過程進行動態分析。仿真模型見圖3所示。

圖3 翻車機本體液壓系統壓車缸部分仿真模型
相關的仿真參數如表2所示:
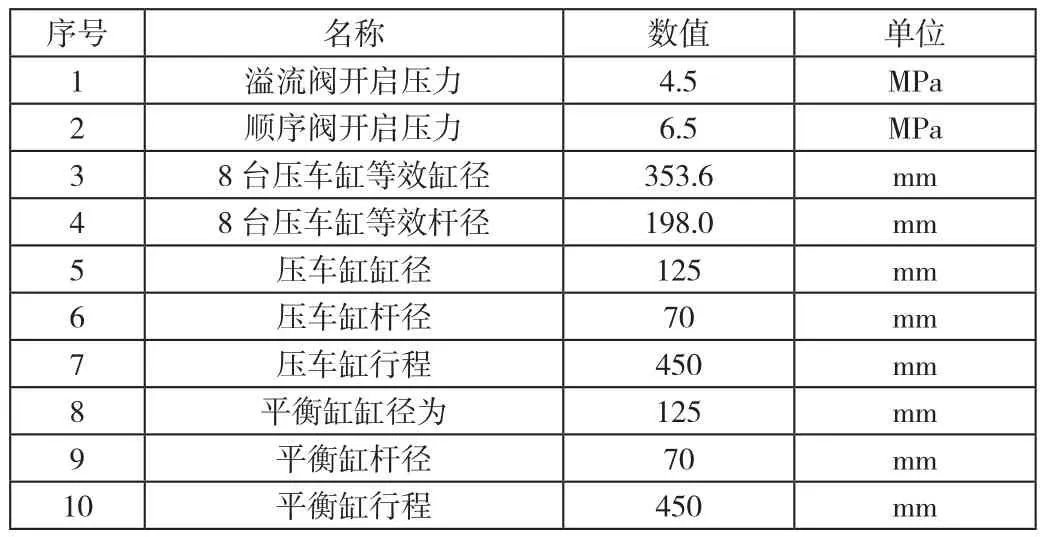
表2 仿真參數
仿真過程分為兩步進行,第一步不考慮順序閥和平衡缸的作用,即模擬未采用平衡缸的限壓模式,仿真得到壓車缸活塞桿位移及無桿腔壓力曲線見圖4。

圖4 無平衡缸時壓車缸曲線
如圖4(a)所示,初始狀態0.18s,活塞桿位移從初始位置逐漸減小到最小值,100s后,轉子開始順時針轉動,由于液壓鎖作用,活塞桿基本不動。由圖4(b)可知,因負載增大,壓力開始增大,最大值為18.2Mpa,大于壓車缸額定工作壓力16MPa。
仿真第二步,加入平衡缸后,仿真計算得到壓車缸活塞桿位移曲線見圖5,無桿腔壓力曲線見下圖10。

圖5 加平衡缸時壓車缸曲線
由圖5(a)可知活塞桿位移在100s后快速增大,最大值約為0.26m,小于初始位移0.28m,該階段壓力整體上升,在6.5MPa時保持1s后快速升高至14.8MPa,壓車缸有桿腔壓力等于6.5MPa時,順序閥打開,平衡缸活塞桿縮回,壓車缸無桿腔部分油液流向平衡缸;當平衡缸活塞桿完全縮回后,壓車缸無桿腔油液不能排出,壓力繼續增高,直到最大值。壓力變化趨勢和最大壓力值與現場實測基本一致;該過程壓車缸活塞桿伸出距離小于壓下距離,車皮未脫離軌道。
3 本體液壓系統分離方案的性能分析
3.1 本體液壓系統分離方案原理
新設計方案將液壓站和平衡缸移出本體,為盡量減小管路壓力損失,閥組出口采用硬管至本體附近,本體上液壓缸也采用硬管至翻車機端部,中間采用高壓軟管,高壓軟管隨本體來回轉動。壓車部分,管道內徑為34mm,閥組出口硬管長15m,本體硬管長30m。
3.2 新方案性能仿真分析
新設計方案由于管路增長,且采用了柔性軟管,在上述模型基礎上增加軟管模型(圖3),對壓車缸無桿腔壓力和活塞位移進行性能驗算,判斷新方案對系統性能的影響是否能滿足壓車要求,增加軟管模型后,得出壓車缸曲線如圖6所示。

圖6 新方案壓車缸曲線(加平衡缸時)
由圖6可知,新設計方案的位移增大至0.27mm,比原系統活塞桿位移增大,但仍小于初始位移;改變前后,壓力變化趨勢一致,但最大壓力值降低至14.3MPa。分析原因,軟管增加了系統阻尼系數,系統響應變慢,軟管具有彈性,壓力升高時,系統容積進一步增大,降低了系統最高壓力,活塞桿最大位移值變大。車皮未脫軌,由無桿腔壓力可知,最大壓力未超過液壓缸和管道額定壓力。
4 結論
由翻車機的工作原理和負載特點可知,壓車缸活塞位移與壓力控制是關鍵。針對現場實際工況,提出了將液壓站從本體分離的布置方式,并采用AMESim軟件,進行了數值仿真,模擬了新舊方案對壓車缸活塞位移與壓力的影響,得出如下結論:(1)將液壓站移出翻車機本體后,采用軟管連接,且硬管長度增大,對壓車缸無桿腔壓力和活塞桿位移均產生影響,但仍在安全范圍內,不會導致車皮脫軌;(2)新方案的液壓缸無桿腔壓力最大值略有下降,有利于增長液壓元件和液壓輔件壽命;(3)新方案的系統響應速度變慢,但仍能滿足使用要求。(4)該系統執行元件參數有待優化,減小平衡缸活塞位移,減小壓車缸有桿腔最高壓力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32