DDS在掃描式X光機(jī)的運(yùn)動(dòng)控制設(shè)計(jì)探究
2019-07-28 08:53:02李慧慧
商品與質(zhì)量 2019年51期
李慧慧
南京市電子口岸有限公司 江蘇南京 210000
掃描式X光機(jī)的特點(diǎn)在于其精度高、性能好,可以得到清晰、精細(xì)的X數(shù)字化圖像,也能夠縮短和減少出片時(shí)間,實(shí)現(xiàn)遠(yuǎn)程教驗(yàn)。X光機(jī)運(yùn)動(dòng)控制設(shè)計(jì)要求高,需要滿足均速性、平穩(wěn)性和多次掃描等作用,也具有極強(qiáng)的運(yùn)用要求。本文針對該光機(jī)的運(yùn)動(dòng)控制要點(diǎn)進(jìn)行研究,探討改性能運(yùn)行的主要原因,并結(jié)合數(shù)字頻率合成器進(jìn)行調(diào)速控制,最終會(huì)滿足運(yùn)動(dòng)控制的多項(xiàng)要求。
1 分析DDS在掃描X光機(jī)運(yùn)動(dòng)控制的要點(diǎn)
隨著我國科學(xué)技術(shù)不斷發(fā)展,人們對X光片有了更為深刻的認(rèn)識(shí)和理解,新一代X光機(jī)設(shè)備工作原理在于控制和固定掃描設(shè)備文檔,直接利用傳感器和發(fā)射頭檢測被檢測物的上下方,最后在對掃描區(qū)域進(jìn)行全方位掃描,經(jīng)過掃描控制后,整個(gè)感應(yīng)器可以輸出經(jīng)過放大后的若微電流,并最終經(jīng)過數(shù)據(jù)處理和圖像控制,實(shí)現(xiàn)數(shù)據(jù)傳輸目標(biāo)啊。
1.1 電機(jī)和電機(jī)控制器的選擇要求
通常而言,掃描設(shè)備在水平掃描時(shí)候可拖動(dòng)的最大重量為220KG,摩擦力也屬于滾動(dòng)摩擦,可選用0.5-1kw的小功率電機(jī)滿足動(dòng)力要求。在這里設(shè)計(jì)人員需要分析速度和位置對掃描設(shè)備的運(yùn)行情況進(jìn)行研究。位置型的電機(jī)驅(qū)動(dòng)要求滿足位置和速度的雙方面要求,多選用0.75kw的直流伺服電動(dòng)機(jī),并安裝光電編碼器,保證電氣驅(qū)動(dòng)選擇脈沖控制質(zhì)量[1]。
1.2 運(yùn)動(dòng)控制研究分析
完成初次電氣控制掃描后,后設(shè)計(jì)需要分析速度對設(shè)備的掃描質(zhì)量影響。速度設(shè)計(jì)控制時(shí)候,因?yàn)槲恢眯碗姍C(jī)驅(qū)動(dòng)多采用脈沖控制,允許誤差也多在±4095個(gè)脈沖范圍,建議加減速度時(shí)候應(yīng)當(dāng)采用合理的升降曲線處理,以保證在較短的140毫米內(nèi),保證電機(jī)啟動(dòng)平穩(wěn)。若運(yùn)動(dòng)升降的變化速度過快,驅(qū)動(dòng)發(fā)送的控制脈沖頻率步距變化過快,也會(huì)讓電機(jī)產(chǎn)生震蕩(如圖1所示)。
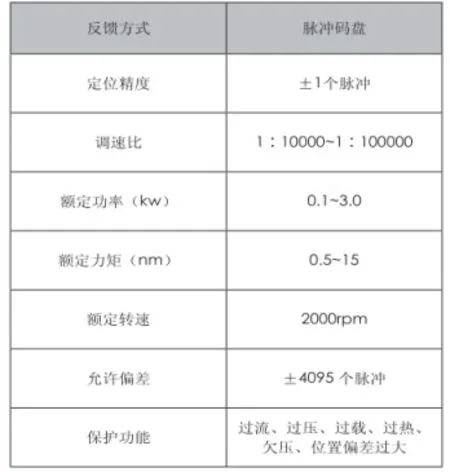
圖1 應(yīng)用參數(shù)值分析
為了控制以上運(yùn)動(dòng)問題,需要在控制范圍內(nèi)加上直接數(shù)字合成頻率其,也可以采用多個(gè)標(biāo)準(zhǔn)信號(hào)處理實(shí)現(xiàn)多個(gè)分辨率,高精度控制。一般可數(shù)字變成頻率合成器和時(shí)鐘發(fā)生器相位累加為32為,輸入?yún)⒖夹畔㈩l率也多在1-125MHZ,但頻率更新后,該速度可以達(dá)到每秒鐘兩千三百多萬次,輸出頻率分辨率為0.000224Hz,內(nèi)部也帶有轉(zhuǎn)換器和比較器。
此外,AD9550內(nèi)部設(shè)有多纖維的寄存器,在保證32位頻率控制和相位控制3位功能控制字基礎(chǔ)上,也可完成并行或者串行的輸出、輸出方式,為了有效保證和控制原理諧波,也建議將輸出頻率限定和控制在參考時(shí)鐘33%以下,當(dāng)選用的參考時(shí)鐘為12.8MHz時(shí)候,輸出頻率范圍也變成了0-4.2MHz,分辨率完全滿足設(shè)計(jì)要求。
2 運(yùn)動(dòng)部分設(shè)計(jì)分析
2.1 電機(jī)驅(qū)動(dòng)控制器分析
電機(jī)驅(qū)動(dòng)器的工作方式為,保證驅(qū)動(dòng)器的使能端置于低水平,且多個(gè)端口連接有效,但CW端可以輸出脈沖,整個(gè)電機(jī)也可以實(shí)現(xiàn)正向旋轉(zhuǎn),整個(gè)CCW端輸入脈沖后,電機(jī)可以反向旋轉(zhuǎn),每輸入一個(gè)脈沖,電機(jī)轉(zhuǎn)動(dòng)的角度也會(huì)發(fā)生明顯變化。且電機(jī)轉(zhuǎn)速和控制買充電脈沖成正比,有且僅但電機(jī)轉(zhuǎn)速和控制脈沖頻率成正比時(shí)候,可通過脈沖數(shù)控制距離,最終實(shí)現(xiàn)速度和位置得到控制[2-3]。
2.2 速度控制
上文論述了掃描區(qū)域電機(jī)速度對掃描清晰度的影響,因位置型電機(jī)驅(qū)動(dòng)采用脈沖控制方式,允許誤差在4095個(gè)數(shù)內(nèi),因此建議采用合理升降速曲線控制,保證在較短的140mm內(nèi),電機(jī)穩(wěn)定其平穩(wěn)制動(dòng)運(yùn)行,若電機(jī)的升降速度過快,也會(huì)對整個(gè)驅(qū)動(dòng)器發(fā)送控制冒充頻率造成影響,嚴(yán)重時(shí)也會(huì)導(dǎo)致電機(jī)發(fā)生振蕩問題。
2.3 單片機(jī)直接發(fā)送脈沖控制分析
單片機(jī)運(yùn)行需要完成上位機(jī)通訊和控制床宣傳和接受意外傷害傳感器等相應(yīng)的影響,這些控制方法都需要采用1.25秒勻速加速度為基礎(chǔ),實(shí)現(xiàn)數(shù)據(jù)控制。一般一個(gè)單片機(jī)的晶振為24MHz,周期的指令控制在0.5微秒。若采用單片機(jī)指令發(fā)出一定的脈沖,整個(gè)脈沖的變化速度步距過大,高速運(yùn)轉(zhuǎn)時(shí)候也可能產(chǎn)生過沖問題,若超出了允許范圍值,整個(gè)電機(jī)就會(huì)產(chǎn)生強(qiáng)烈的振動(dòng)[4-5]。
3 結(jié)語
綜上所述,水平掃描時(shí)候發(fā)生了爬坡問題,影響了x光片的精度,當(dāng)選用參考時(shí)鐘為12.8MHz時(shí),輸出頻率范圍是0-4.2MHz,頻率分辨率為0.00183Hz,完全可以滿足設(shè)計(jì)要求。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年18期)2018-11-14 01:48:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30