郭莊煤業(yè)液壓支架自主跟機(jī)控制系統(tǒng)的應(yīng)用研究
2019-07-30 12:06:46武良杰
山東煤炭科技 2019年7期
武良杰
(山西潞安郭莊煤業(yè)有限責(zé)任公司,山西 長(zhǎng)治 046100)
潞安集團(tuán)郭莊煤業(yè)有限責(zé)任公司開拓采用立井單水平方式,在井下進(jìn)行綜采作業(yè)時(shí)需要隨著采煤機(jī)、刮板輸送機(jī)的運(yùn)行不斷調(diào)整液壓支架的支護(hù)站位,以確保井下綜采作業(yè)的安全。目前郭莊煤業(yè)對(duì)液壓支架的調(diào)整完全依靠人工根據(jù)采煤機(jī)、刮板輸送機(jī)的位置來對(duì)其支護(hù)位置進(jìn)行調(diào)節(jié),勞動(dòng)強(qiáng)度大,效率低,支護(hù)定位精度差,嚴(yán)重影響了井下綜采作業(yè)的安全性和效率。為了克服這種現(xiàn)狀,郭莊煤業(yè)成立了專門的技術(shù)攻關(guān)小組,對(duì)液壓支架的跟機(jī)自動(dòng)化技術(shù)進(jìn)行研究,經(jīng)過近3年的技術(shù)攻關(guān),研究了一種新的液壓支架自主跟機(jī)控制系統(tǒng),其能夠根據(jù)刮板輸送機(jī)和采煤機(jī)的井下位置,自動(dòng)對(duì)液壓支架支護(hù)組各個(gè)支架的動(dòng)作方式、動(dòng)作時(shí)間等進(jìn)行調(diào)節(jié),完全實(shí)現(xiàn)了液壓支架的自主跟機(jī)控制,目前其已經(jīng)在11412綜采工作面投入了使用,表現(xiàn)出了極高的穩(wěn)定性。
1 液壓支架自主跟機(jī)原理
在煤礦井下進(jìn)行綜采作業(yè)時(shí),液壓支架的核心的支護(hù)姿態(tài)主要包括支護(hù)的高度、支架頂梁的支護(hù)角度以及液壓支架護(hù)幫板的收放時(shí)機(jī),液壓支架需要根據(jù)采煤機(jī)和刮板輸送機(jī)的位置進(jìn)行自主決策,完成對(duì)護(hù)幫板的收放、液壓支架的升降、移位等動(dòng)作,且其支護(hù)時(shí)的姿態(tài)也需要根據(jù)綜采作業(yè)的進(jìn)行而不斷地進(jìn)行調(diào)整。具體來說當(dāng)采煤機(jī)沿前進(jìn)方向靠近液壓支架時(shí),液壓支架需要在指定的距離開始收回護(hù)幫板,避免其影響采煤機(jī)的截割作業(yè),而位于采煤機(jī)后方的液壓支架則需要在采煤機(jī)遠(yuǎn)離一定的距離后控制護(hù)幫板的打開。同時(shí)在采煤機(jī)最后側(cè)的液壓支架需要在指定的距離上完成“降架-移架-升架-支護(hù)”,當(dāng)液壓支架完成移架后,由液壓支架上的推移液壓缸將其推入刮板輸送機(jī)的中部槽處,進(jìn)行下一組的支護(hù)。液壓支架自主跟機(jī)與采煤機(jī)、刮板輸送機(jī)的動(dòng)作原理如圖1所示[1],圖中箭頭方向表示采煤機(jī)的運(yùn)動(dòng)方向,0號(hào)液壓支架的位置表示正對(duì)液壓支架的采煤機(jī)的中心位置,Δx3表示需要進(jìn)行收護(hù)幫板的液壓支架的區(qū)域,Δx1表示距離采煤機(jī)中心后側(cè)需要伸出護(hù)幫板的第一個(gè)液壓支架的位置。Δx2表示第一個(gè)需要進(jìn)行推溜作業(yè)的液壓支架距離Δx1位置的距離。
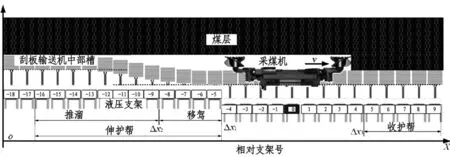
圖1 液壓支架的自主跟機(jī)動(dòng)作示意圖
2 液壓支架自主跟機(jī)控制方法研究
液壓支架的自主跟機(jī)決策的實(shí)質(zhì)是根據(jù)采煤機(jī)的截割作業(yè)位置和狀態(tài)決定執(zhí)行何種跟機(jī)動(dòng)作。由于煤礦井下地質(zhì)條件復(fù)雜,采煤機(jī)運(yùn)行狀態(tài)多變,若完全靠傳感器設(shè)備對(duì)采煤機(jī)的運(yùn)行狀態(tài)進(jìn)行判斷則極易造成截割作業(yè)過程中截割滾筒與液壓支架頂梁產(chǎn)生干涉。因此為提高液壓支架自主跟機(jī)控制系統(tǒng)的控制精確度,本文引入了紅外攝像機(jī)的視頻監(jiān)控系統(tǒng)[2],通過對(duì)采煤機(jī)搖臂上的信標(biāo)的監(jiān)控來實(shí)現(xiàn)對(duì)采煤機(jī)運(yùn)行狀態(tài)的精確判斷,其自主跟機(jī)決策流程如圖2所示。
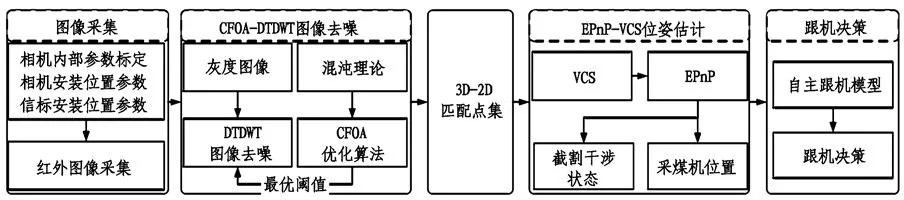
圖2 液壓支架自主跟機(jī)決策流程示意圖
由圖2可知,當(dāng)進(jìn)行液壓支架自主跟機(jī)決策控制時(shí),系統(tǒng)首先對(duì)視頻系統(tǒng)的內(nèi)部參數(shù)進(jìn)行歸零處理,對(duì)視頻監(jiān)控設(shè)備在液壓支架頂梁上的位置及采煤機(jī)搖臂上信標(biāo)的位置參數(shù)進(jìn)行校核,然后通過視頻系統(tǒng)對(duì)ArUco信息圖像進(jìn)行監(jiān)控,從而獲得一些3D-2D信息圖像的匹配參數(shù),然后控制系統(tǒng)對(duì)獲得的信息參數(shù)進(jìn)行求解轉(zhuǎn)換,同時(shí)再結(jié)合紅外監(jiān)測(cè)機(jī)各類傳感器設(shè)備的監(jiān)測(cè)數(shù)據(jù)即可求得采煤機(jī)與液壓支架的相對(duì)位置關(guān)系,及采煤機(jī)的下一步運(yùn)行動(dòng)作,最后即可對(duì)液壓支架的運(yùn)行狀態(tài)進(jìn)行控制,實(shí)現(xiàn)自主跟機(jī)控制。
3 液壓支架自主跟機(jī)監(jiān)測(cè)系統(tǒng)
在該自主跟機(jī)控制系統(tǒng)中以雙CAN總線為基礎(chǔ)[3],建立了井下綜采作業(yè)監(jiān)控和井上控制中心的數(shù)據(jù)信息監(jiān)測(cè)與遠(yuǎn)程控制平臺(tái)。將各監(jiān)測(cè)設(shè)備監(jiān)測(cè)到的液壓支架和采煤機(jī)的位置狀態(tài)信號(hào)實(shí)時(shí)傳輸?shù)降孛嫔系谋O(jiān)測(cè)控制中心,由監(jiān)測(cè)人員對(duì)其運(yùn)行狀態(tài)進(jìn)行監(jiān)控,并根據(jù)運(yùn)行情況及時(shí)進(jìn)行人工控制干預(yù)[4],確保井下采煤機(jī)和液壓支架協(xié)同運(yùn)行的可靠性與穩(wěn)定性。井上監(jiān)測(cè)控制中心的監(jiān)測(cè)實(shí)時(shí)畫面如圖3所示。

圖3 井上遠(yuǎn)程監(jiān)測(cè)控制中心實(shí)時(shí)監(jiān)測(cè)畫面
4 液壓支架的自主跟機(jī)控制系統(tǒng)的應(yīng)用
該液壓支架自主決策系統(tǒng)已應(yīng)用在郭莊煤業(yè)11412綜采工作面,各類傳感器設(shè)備在液壓支架和采煤機(jī)上的布置結(jié)構(gòu)如圖4所示[4]。
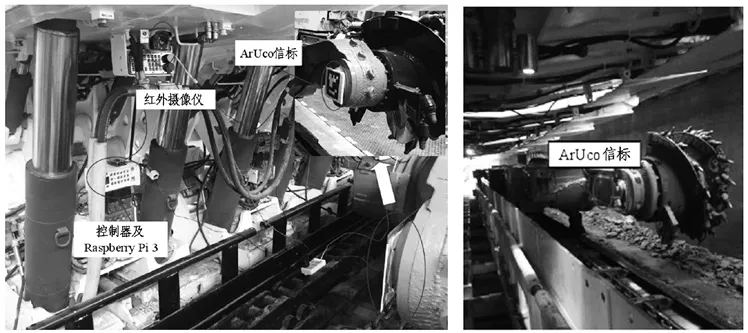
圖4 液壓支架自主跟機(jī)決策系統(tǒng)傳感器布置結(jié)構(gòu)示意圖
利用該自主決策控制系統(tǒng)對(duì)井下截割作業(yè)時(shí)采煤機(jī)的跟機(jī)控制過程進(jìn)行監(jiān)測(cè),結(jié)果如圖5所示。
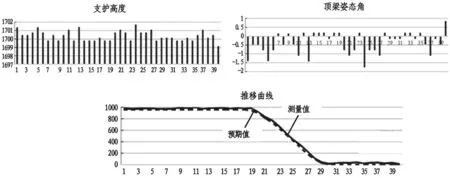
圖5 液壓支架自主跟機(jī)監(jiān)控結(jié)果
由監(jiān)測(cè)結(jié)果分析可知,該圖所示為采煤機(jī)位于19號(hào)液壓支架對(duì)應(yīng)位置時(shí)液壓支架的支護(hù)高度、頂梁位置及支架聯(lián)動(dòng)推移曲線。當(dāng)液壓支架完成一個(gè)完整的降架-移架-升架動(dòng)作后,各個(gè)液壓支架的支護(hù)高度均保持在1699~1702mm之間,其頂梁的支護(hù)角度的變化范圍均維持在了-1.8°~0.8°之間,各液壓支架支護(hù)狀態(tài)維持性較好。液壓支架執(zhí)行自主決策根據(jù)控制的實(shí)際運(yùn)行曲線和理論分析的液壓支架的運(yùn)行位置曲線基本重合,彎曲滿足井下自主跟機(jī)控制的要求。
通過在郭莊煤業(yè)一年多的應(yīng)用,實(shí)現(xiàn)井下綜采面直接減員5人,液壓支架支護(hù)效率提升4.4倍,支護(hù)可靠性和穩(wěn)定性也得到了顯著的提升。目前該項(xiàng)目已完成驗(yàn)收,計(jì)劃推廣到潞安集團(tuán)其他煤礦。
5 結(jié)論
(1)采用紅外攝像機(jī)的視頻監(jiān)控系統(tǒng)能夠提高對(duì)采煤機(jī)和液壓支架相對(duì)位置與工作姿態(tài)判斷的準(zhǔn)確性。
(2)在該自主控制系統(tǒng)作用下液壓支架完成一個(gè)完整的降架-移架-升架動(dòng)作后,各個(gè)液壓支架的支護(hù)高度均保持在1699~1702mm之間,其頂梁的支護(hù)角度的變化范圍均維持在了-1.8°~0.8°之間,控制精度高。
(3)自動(dòng)化程度高,實(shí)現(xiàn)井下綜采面直接減員5人,液壓支架支護(hù)效率提升了4.4倍,支護(hù)可靠性和穩(wěn)定性也得到了顯著的提升。
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
防爆電機(jī)(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
模具制造(2019年3期)2019-06-06 02:10:54
故事大王(2016年7期)2016-09-22 17:30:08
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年4期)2014-02-27 14:07:18
山西大同大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年5期)2014-01-23 01:58:00
