防空作戰中航母編隊預警機陣位配置
2019-08-05 09:39:12馬政偉
艦船電子工程 2019年7期
韓 宇 馬政偉 吉 澤
(海軍大連艦艇學院 大連 116018)
1 引言
預警機作為航母編隊防空預警的重要兵力,在現代航母編隊防空作戰、演習中,通過前出配置,擴大預警探測縱深,為編隊防空組織贏得寶貴時間,從而提高編隊的戰斗堅持力。科學合理的預警機陣位配置,對于提高預警機的探測效果,確保預警機自身安全具有十分重要的軍事價值。基于編隊可能遭受的威脅和預警機的預警能力,對預警機進行優化配置,使得“威脅”和“能力”相匹配。本文在對編隊的威脅扇面進行分析和對預警機預警性能進行仿真計算的基礎上,得出了預警機陣位配置參數確定的一般方法和流程。
2 編隊威脅扇面分析
在航母編隊的某一威脅方向上,敵機場(或敵航母綜合作戰區、敵導彈艦艇編隊)D與我編隊A的相對位置如圖1所示。A、D之間的距離為Lad,敵機的戰術航程[2]和敵機載反艦導彈的最大有效射程之和為S,則敵機對我編隊的攻擊路線必須在以 A、D 為焦點,S為長軸長的橢圓內[1~2]。令 S=2a,Lad=2c,橢 圓 半 短 軸。
在Lad和S一定的條件下,編隊的威脅扇面角的大小判斷主要受敵空襲戰術和裝備戰技性能的約束[1]。如圖1所示,假設敵對我編隊的威脅扇面角為θ。由于敵機的空襲戰術和裝備戰技性能的模糊性,導致對敵機動戰術和敵反艦導彈的航路規劃的不確定性,近而造成威脅扇面角大小的不確定性,因此我編隊的威脅扇面角可能取值為[0°,180°]。
圖1 敵對我編隊可能攻擊路線示意圖
由文獻[1]分析可知,在Lad和S一定的條件下,敵具有航路規劃功能的“等效反艦導彈”在滿足末端航路段長度大于末端最小長度Dmin,轉彎角大于最小轉彎角αmin,每段航路距離大于最小航路段距離Lmin的情況下,威脅扇面可作如下討論。
圖2 (a) Dmin≤a-c時威脅扇面示意圖

圖2 (b) Dmin>a-c時威脅扇面示意圖
1)如 圖 2(a)所 示 , Dmin≤a-c ,即,此時威脅角達180°,我編隊正面完全暴露在敵導彈的有效攻擊范圍內。通常在敵我距離Lad和“等效航路長度”S利于敵實施多方向多路徑的攻擊,和敵技戰術水平占優的情況下發生。這種情況對我編隊的防空預警探測實時性、準確性、覆蓋范圍等能力提出了很高的要求。
2)如 圖 2(b)所 示 , Dmin>a-c ,即,此時威脅角隨敵飛機和反艦導彈技戰術水平的下降而減小。
3 預警機預警探測能力分析
預警機在雙平行線航線的巡邏線上探測來襲目標時,其預警探測能力的主要指標有發現近界Bjj、巡邏線長度Dxl、強效區寬度Bqx以及總覆蓋區寬度 Bz等[3]。
3.1 發現近界
如圖3所示,發現近界為當敵機來襲時,要求預警機在敵機距巡邏線一定距離之前發現敵機,從而確保我方殲擊機能及時攔截敵機并保證預警機自身安全。其反映的是預警機預警探測縱深的大小,在預警機可覆蓋探測范圍內,發現近界越小(即預警探測縱深越大),對可疑目標預警的置信度越高,同時我方攔截目標的準備時間更加充足。發現近界Bjj表示為
式中:Dd為敵機空空導彈射程;Laq為我方殲擊機攔截敵機前預警機飛過的安全距離;Ld為預警機成功到達安全區域時敵機飛過的距離;taq為預警機回撤到安全區的時間;Rzw為預警機轉彎半徑;g為重力加速度;γ為預警機轉彎坡度;vd為敵機飛行速度;vy為預警機飛行速度。

圖3 預警機發現近界分析示意圖
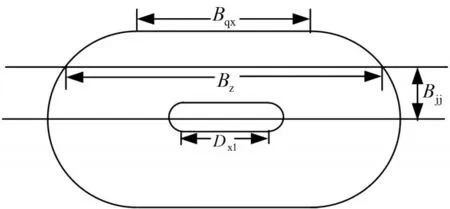
圖4 預警機探測能力分析示意圖
3.2 巡邏線長度
如圖4所示,受來襲目標與預警機相對運動、預警機發現近界以及預警機雷達探測距離的影響,預警機的巡邏線長度范圍是動態變化的。為了確保預警機能夠發現從臨界位置來襲的目標,不發生漏警,巡邏線長度Dxl應滿足如下條件[3]:

式中:Dtc為預警機雷達探測距離。
3.3 強效區寬度和總覆蓋區域寬度
預警機沿雙平行線航線巡邏時,在航線上的任意位置均能探測到的區域稱為強效區[6]。通常預警雷達探測的強效區為漏警率等于0的區域,在該區的目標都能在發現近界之前被發現。故強效區寬度 Bqx可由下式表示[3]:

總覆蓋區為預警機沿雙平行線航線巡邏時,預警雷達所探測的全部區域[6]。由于受到預警機發現近界的影響,總覆蓋區寬度Bz表示為[3]

3.4 仿真分析
1)仿真目的
探索預警雷達探測距離、預警機巡邏飛行速度、敵機來襲速度對發現近界、巡邏線長度、強效區寬度、總覆蓋區寬度的影響。
2)參數設置
預警雷達探測距離 Dtc∈[300km,500km],預警機飛行速度 vy∈[300km/h,700km/h],預警機轉彎坡度γ=20°,重力加速度 g=9.8m2/s,安全距離Laq∈[0km,200km] , 敵 機 飛 行 速 度vd∈[500km/h,1200km/h] ,敵 空 空 導 彈 射 程Dd=100km。
3)仿真結果與分析
根據表1數據分析可知,在給定條件下,當tanα>1時,Bjj隨 Laq的增大而增大,因此為了確保預警機的安全,我方殲擊機應伴飛在預警機附近 ;當 tanα=1時 ,Bjj≈Dd,當 tanα<1時 ,Bjj<Dd,因此當tanα≤1時,只要保證預警機在敵機空空導彈射程之外,以不低于來襲飛機的速度飛向安全區,就可保證自身安全;當Laq一定時,Bjj隨tanα的增大而增大,且存在tanα較大時,Bjj的取值接近甚至大于預警機雷達探測距離Dtc。
為了確保預警機的自身安全和足夠的探測縱深,發現近界 Bjj∈[100km,200km],回撤到安全區域的時間為5min~10min,巡邏速度vy應取600km/h~700km/h,安全距離Laq≤100km。
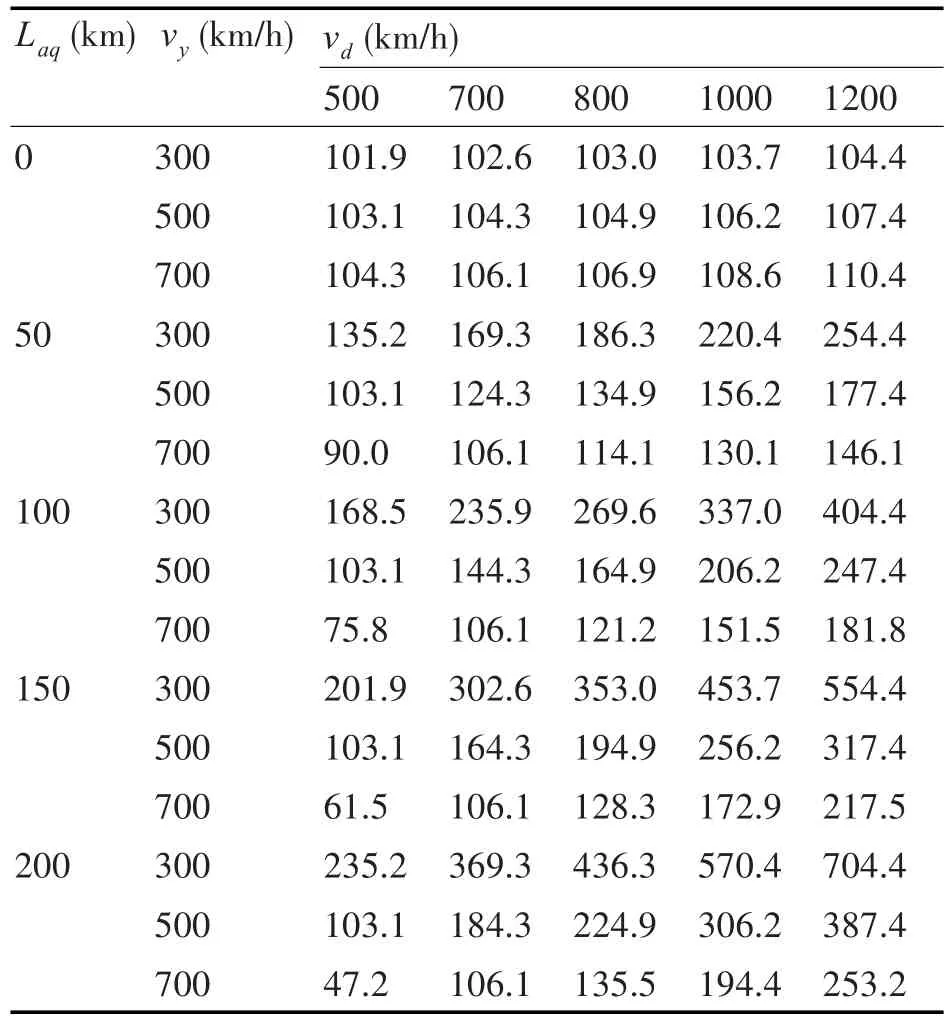
表1 不同條件下發現近界Bjj的變化情況

表2 不同條件下巡邏線長度Dxl的變化情況
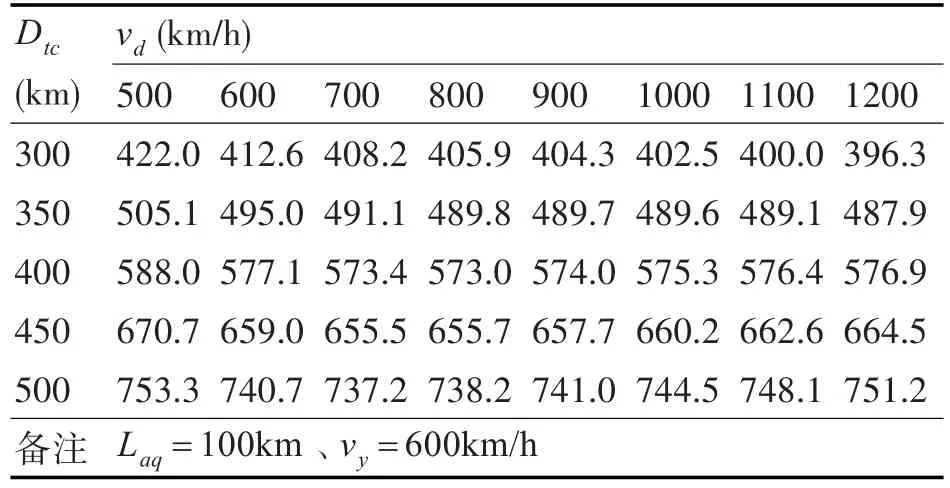
表3 不同條件下強效區寬度Bqx的變化情況
根據表2、表3數據分析可知,在給定條件下,預警機轉彎半徑=7.8km,一個巡邏周期轉彎時間=0.08h,雷達探測距離基本上能滿足預警機巡邏時的適飛性要求。
4 預警機陣位配置分析
敵機對我航母編隊實施空襲時,根據搜集的敵我距離、敵機、機載導彈性能、敵技戰術水平等情報,對敵方威脅進行初判,確定我航母編隊受到的空中主要威脅方向和威脅扇面等,在主要威脅方向合理配置預警機,對敵實施預警探測。通常,預警機配置在垂直于威脅方向上,在殲擊機作戰區[4]內,一次攔截近界線之后,采用雙平行線航線[5]進行巡邏。
實際作戰中,首先對敵方各威脅參數評估計算,然后確定預警機所采取的作戰參數。預警機前出執行預警探測任務時的主要陣位參數是前出距離Dqc和巡邏線長度Dxl。
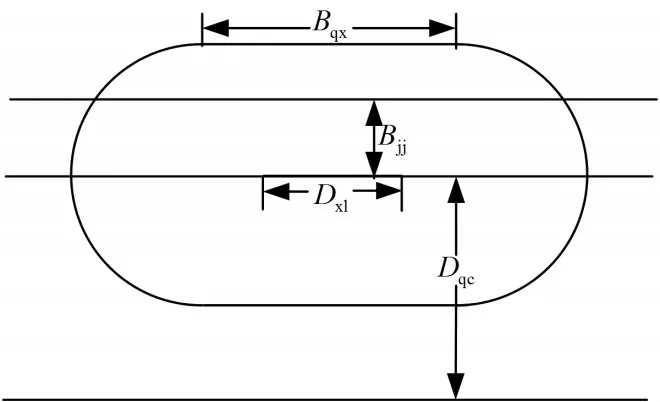
圖5 預警機陣位分析示意圖
4.1 前出距離確定
預警機前出距離Dqc的選擇應遵循確保自身安全且充分發揮固有探測能力的原則[6]。因此,預警機前出距離應滿足以下基本條件[5]:1)確保預警機留空時間;2)在編隊有效通信范圍之內;3)在敵機突破發現近界后,掩護的殲擊機能及時趕到;4)避開敵火力范圍。
假設預警機續航時間為tz,規定留空時間為tlk,技術要求預留時間為tyl,編隊有效通信距離為Dtx,則前出距離Dqc滿足如下約束條件:

如圖5所示,前出距離的大小會直接影響預警探測強效區的覆蓋區域,因此前出距離的確定還要結合設定的探測任務區域進行。
4.2 巡邏線長度確定
假 設 敵 我 距 離 Lad∈[760km,960km] ,S∈[860km,960km],敵威脅路線所在橢圓短軸2b的取值如表4所示。
為確保在主要威脅方向上,能夠及時發現敵方的來襲目標,避免漏警情況發生,配置預警機時應將預警雷達的預警探測強效區覆蓋敵來襲的所有可能路線。對比表3和表4數據可知,由于受我方預警能力、防空能力、通信能力、敵方技戰術水平等因素的制約,預警機強效區的位置選擇會出現如圖6所示的幾種情況(設B1、B2為敵來襲路線的臨界點,B1B2=2b′)。
表4 不同條件下敵威脅路線所在橢圓短軸2b的變化情況
圖6 (a) 強效區位置選擇示意圖Bqx≥2b
圖6 (b) 強效區位置選擇示意圖2b′≤Bqx<2b
1)如圖6(a)所示,Bqx≥2b ,此時我預警機強效區能有效覆蓋敵來襲的所有可能路線,在前出距離允許的情況下,預警機配置縱深較大,配置策略較靈活。
2)如圖6(b)所示,2b′≤Bqx<2b ,此時我預警機強效區有效覆蓋能力有限,為了能對敵來襲的所有可能路線上的目標進行有效預警,預警機可配置在 B1B2B3B4和兩個區域內,顯然區域B1B2B3B4距離我方編隊較近,對預警機防護較強,區域距離敵方防空火力太近,通常在我空中優勢、通信能力明顯、前出距離范圍大時采用。
3)Bqx<2b′,此時我預警機前出部署只能部分覆蓋敵來襲的所有可能路線,不能避免漏警情況的發生。此時,預警機應減少前出距離,及時機動拉大敵我之間的距離,提升防空兵力待戰等級,隨時攔截敵突防兵力。同時可向上級請求增派預警兵力。
通過敵方來襲路線橢圓的短軸長度和為敵來襲路線的臨界點間的距離,選擇合適的強效區寬度,從而確定最佳的巡邏線長度。
5 結語
本文研究了單架預警機的陣位配置,提出了預警機陣位參數的確定方法和一般流程。但是,預警機前出到指定區域執行預警探測任務過程中,會面臨著戰場環境制約、敵方干擾和威脅、我方掩護兵力協同度不高等因素的影響,導致無法完成預期任務。因此,多預警機的協同配合就顯得尤為重要。而如何選擇多架預警機的前出距離、巡邏線長度、進入任務區的航線等作戰參數,對保證任務區域的穩定覆蓋,最大發揮裝備的設計性能,是一項十分重要的課題。在后續學習中將著重對多預警機協同的陣位配置研究。
