基于C-CKF的單站外輻射源定位方法
2019-08-05 09:39:20舒益群陳啟德
艦船電子工程 2019年7期
舒益群 陳啟德
(1.海軍航空大學 煙臺 264001)(2.91049部隊34分隊 青島 266000)
1 引言
外輻射源定位技術[1]是無源探測領域中的研究熱點之一,是對傳統有源探測方式的必要補充。外輻射源定位設備自身不發射電磁波,而借助民用或軍用的各類輻射源來實現對目標的探測跟蹤。單站外輻射源定位[2]僅靠一個接收站就可以實現對目標的定位,同時由于接收站的可移動性,極大提高了系統的靈活性,在運用部署上十分便利,而且同時具有傳統外輻射源定位隱蔽性、反隱身等方面的優勢[3~4],近年來受到了人們的極大關注。
當外輻射源為非合作時,無法獲得準確輻射源位置給傳統的外輻射源定位帶來巨大的挑戰。傳統的外輻射源定位都是基于已知的輻射源位置來推導目標的位置信息,而且輻射源的位置常常還是固定的[5~6],在實際應用中受到很大的限制。而本文中采用的定位方法是基于非合作的機載外輻射源,外輻射源的狀態也需要在定位過程中進行不斷的更新。本文使用容積卡爾曼濾波來實現對目標狀態以及輻射源狀態的預測和更新。
文獻[2]將目標與外輻射源的狀態向量合并為一個擴展狀態向量,來實現對目標以及輻射源狀態的同時更新,但這種方式狀態向量維數較大,濾波過程收斂較慢且容易發散。本文采用序貫方式依次更新目標與輻射源的運動狀態。在生成量測的預測時,量測方程同時需要目標與輻射源的運動狀態,這就導致了當前時刻已更新的目標狀態會對后更新的輻射源狀態造成影響。當已更新的目標狀態的誤差較大時,后面的輻射源狀態更新過程會放大該誤差。為了削弱這種影響,本文提出了基于交叉融合容積卡爾曼濾波算法(Cross-Fusion Cubature Kalman Filter,C-CKF),將不同更新順序得到的狀態估計進行融合,提高最新量測的利用率,減小隨機噪聲的影響,提高狀態估計的可信度。
2 問題描述
基于非合作外輻射源的單站外輻射源定位模型[7]見圖 1。
目標的狀態向量為 X=[x,x˙,y,y˙]T,輻射源的狀態向量為 Xt=[xt,x˙t,yt,y˙t]T,接收站的狀態向量為 Xr=[xr,x˙r,yr,y˙r]T。其中目標與外輻射源都做近似勻速直線運動,其狀態轉移方程為
其中Ft與Ft,k分別是目標與輻射源在運動過程中的狀態轉移矩陣,vk與vt,k是各自運動過程的過程噪聲。vk與vt,k都是零均值的高斯白噪聲,且相互獨立。
接收站分別接收來自輻射源的直達波以及目標反射的反射波,測量出目標相對接收站的方位角θk,輻射源相對于接收站的方位角φk,并通過兩路信號的到達時間差計算出兩路信號的傳播距離差r以及傳播距離差的變化率r˙。傳播距離差里包含著達到時間差的信息,傳播距離差的變化率里隱藏著多普勒頻移的量測信息。因此,構造量測向量為,同時量測方程為

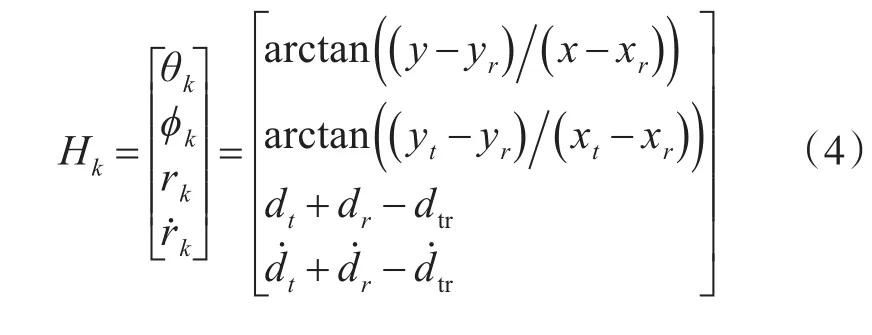
其中wk為量測噪聲。wk為獨立的零均值高斯白噪聲。量測矩陣為其中dt表示輻射源與接收站之間的距離,dr表示目標與接收站之間的距離,dtr表示目標與輻射源之間的距離,d˙t、d˙r和 d˙tr分別是 dt、dr和 dtr的導數。其中

3 預備知識
3.1 容積卡爾曼濾波
針對非線性系統的濾波方法,通常分成兩類[8]。一類是將非線性函數線性化的方法,其代表是擴展卡爾曼。擴展卡爾曼濾波需要對具體的非線性函數求取雅克比矩陣,步驟繁瑣,因省略了高階項,濾波精度有限。另一類是對非線性函數的后驗概率密度進行模擬,因其常采用一系列確定的采樣點進行操作,也被稱為確定采樣型非線性濾波。其中比較有代表性的是無跡卡爾曼濾波(UKF)與容積卡爾曼濾波(CKF)。基于“近似非線性函數的概率密度分布比近似非線性函數本身更容易”的思想,Julier等人在1997年提出了無跡卡爾曼濾波[9],它采用了UT變換去近似非線性住狀態后驗分布。容積卡爾曼濾波[10]是加拿大學者Arasaratnam和Haykin在2009年提出的,它基于球面徑向容積準則采用了一系列容積點去近似非線性函數的后驗概率密度,是當前最接近理想貝葉斯濾波的近似算法。
容積卡爾曼濾波的流程如下。
1)狀態初始化
初始化狀態向量x^k,協方差矩陣Pk,過程噪聲協方差Q和量測噪聲協方差R。
2)構造容積點

其中,n為狀態向量的維數,ξi為容積點集。


3)狀態一步預測

其中,權重wi=1/(2n)。
4)重新構造容積點

5)量測一步預測

6)狀態更新
3.2 分布式狀態融合
多源信息融合中的狀態估計是一門不斷發展的技術[11]。對于來自多個傳感器的信息,通常包含了由不同觀測方式得到的信息,經過信息融合處理后,可以實現信息互補,減小數據的不確定性。
設 X(k+1),Zi( )k+1是高斯變量,若X^i( )
k+1|k+1是給定Zi( )k+1時 X(k+1)的極大似然估計,Pi( )
k+1|k+1時對應的誤差協方差,則k+1時刻的狀態融合解[12]可以表示為

其中
4 基于交叉融合的容積卡爾曼濾波
4.1 傳遞誤差現象
由于輻射源是運動的,其每一時刻的運動狀態也需要進行預測和更新。鑒于目標與輻射源兩者的運動是獨立,不存在相互運動狀態之間的干擾,因此在濾波過程中分別對兩者的狀態進行更新。不失一般性的,在本文中先更新目標的運動狀態,再更新輻射源的運動狀態。此時,經過仿真實驗,發現當先更新的目標位置存在較大的誤差時,會對輻射源位置的更新有較大影響,并時常出現濾波無法收斂的狀況,如圖2所示。

圖2 傳遞誤差示意圖
當目標的跟蹤曲線偏離真實狀態時,輻射源的跟蹤曲線也隨之偏離真實狀態,并且兩者趨勢相近,顯示在RMSE上趨勢更為明顯。其原因在于目標的位置誤差會在輻射源狀態更新時,通過非線性量測函數H(X ,Xt,Xr)影響量測的預測值,帶來不必要的誤差。為了削弱這種誤差傳遞效應,同時提高濾波精度,我們來考慮兩種更新方式之中參數傳遞的關系:
根據卡爾曼濾波的設計思想,當前時刻的量測信息在濾波過程中起到的是對狀態一步預測的修正作用,使得修正后的最優狀態估計滿足最小均方誤差估計。K+1時刻的狀態預測值 X^k+1|k僅包含k+1時刻之前的所有先驗信息,而k+1時刻的狀態估計值X^k+1還包含了k+1時刻的量測信息。
若按第一種方式更新輻射源的狀態信息,在這次濾波循環中,不會發生先更新的目標狀態的誤差經非線性函數傳遞后擴大了對輻射源狀態造成影響的現象,但是這種方式對于最新時刻量測的利用不夠充分,對于狀態一步預測的修正作用也欠佳。若按第二種方式更新輻射源的狀態信息,能夠充分得利用當前時刻的量測信息,但是會發生誤差傳遞現象。
4.2 交叉融合規則
為了減輕誤差傳遞現象的影響,同時改善噪聲隨機性對濾波精度的不利影響,基于多源信息融合[11]的思想,提出了序貫更新交叉融合算法。在分別更新目標以及輻射源運動狀態的過程中,都需要相互的運動狀態參數才能生成量測的預測。將依賴狀態一步預測值的更新稱為前置更新,將依賴狀態估計值的更新稱為后置更新。算法基本思想如下:
1)前置更新。在量測的預測階段,使用狀態一步預測值生成量測的預測,并完成狀態的前置更新,得到。
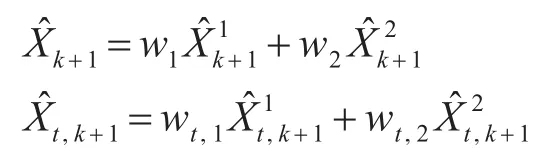
3)狀態融合估計。根據分布式狀態估計融合算法[12],k+1時刻的狀態融合估計及狀態估計協方差為

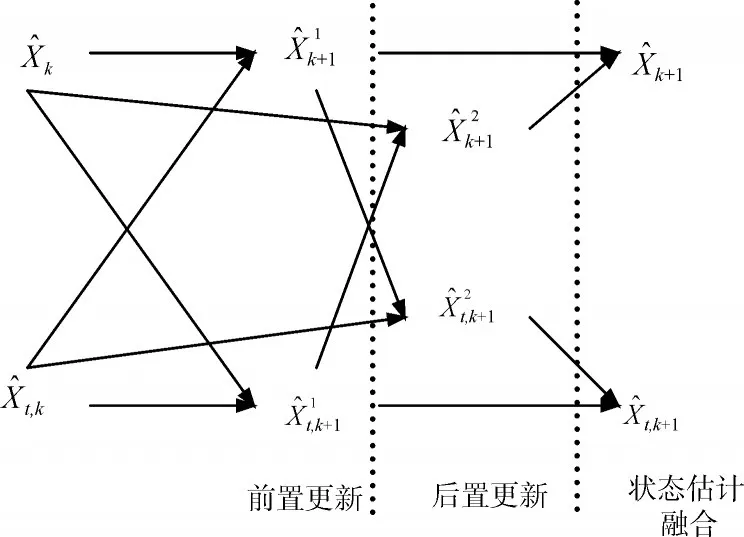
圖3 交叉融合示意圖
4.3 交叉融合容積卡爾曼濾波算法(C-CKF)
以K+1時刻為例,算法的簡單流程如下:
步驟一:狀態一步預測

步驟二:前置更新(基于先驗信息)

步驟三:后置更新(基于后驗信息)
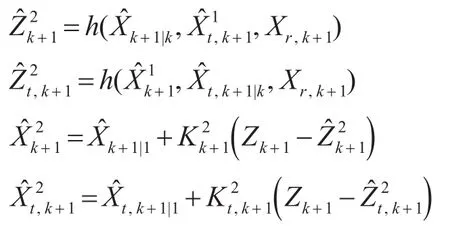
步驟四:狀態融合估計
該方法解決了更新順序可能帶來的隱患,將目標狀態的更新過程與輻射源狀態的更新過程完全一致;同時,通過融合的思想,削弱了誤差傳遞的影響,提高了量測信息的利用率,并提高了狀態估計精度。
5 仿真
在笛卡爾直角坐標系中,對所提算法進行MonteCarlo仿真實驗。MonteCarlo仿真次數取100。并以位置估計的均方根誤差(RootMean SquareError,RMSE)作為度量算法精度的性能指標,定義如下:
仿真場景如下:目標與非合作輻射源都做近似勻速直線運動,接收站做近似圓周運動。目標的初始狀態向量為X0=[20000m,200m/s,20000m,150m/s]T,過程噪聲協方差為Q=diag{(0.5m)2,(1m/s)2,(0.5m)2,(1m/s)2}。 輻 射 源 的 初 始 狀 態 向 量 為 Xt,0=[40000m,-100m/s,10000m,0m/s]T,其過程噪聲協方差與目標的一致。接收站的初始狀態向量為Xr,0=[6000m,600m/s,6000m,0m/s]T,運 動 半 徑R=3000m。量測噪聲協方差為R=diag{(0.005rad)2,(0.005rad)2,(100m)2,(2m/s)2}。仿真結果和分析如下。
對UKF方法、CKF方法與C-CKF方法分別進行仿真,對比三種方法定位誤差的RMSE,仿真結果見圖4。

圖4 (a)目標跟蹤誤差曲線
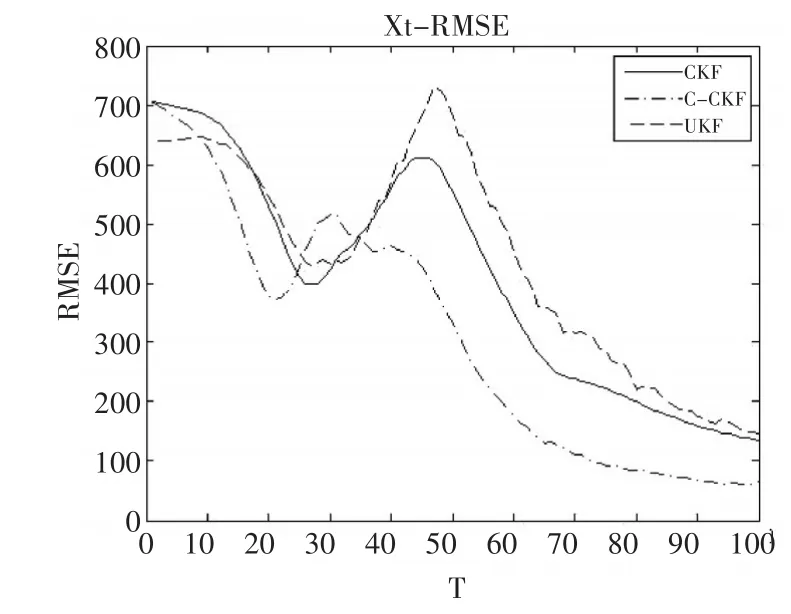
圖4 (b)輻射源跟蹤誤差曲線
由圖4(a)與圖4(b)可知,三種濾波方法均能實現對目標以及輻射源的穩定跟蹤。在三種濾波方法中,C-CKF方法、CKF方法在收斂速度以及濾波精度等方面都要優于UKF方法。這是因為CKF采用三階容積法則的數值積分方法近似高斯積分的思想,其逼進非線性函數后驗概率分布的精度要高于采用UT變換的UKF方法。同時,本文采用的交叉方法屬于對量測信息的二次利用,因提升了對量測信息的利用,減小了隨機誤差的影響,擁有優于另外兩種方法的定位精度以及收斂速度。
為進一步探究隨機噪聲對于定位精度的影響,分別改變狀態噪聲的各個參量,并進行仿真。各仿真環境見表1。

表1 不同噪聲場景的均方差值

圖5 (a)目標跟蹤誤差曲線
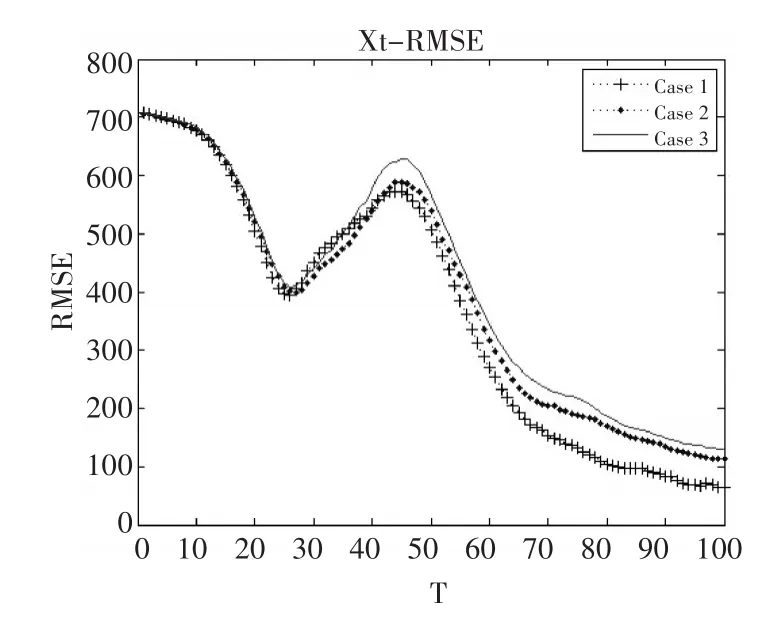
圖5 (b)輻射源跟蹤誤差曲線
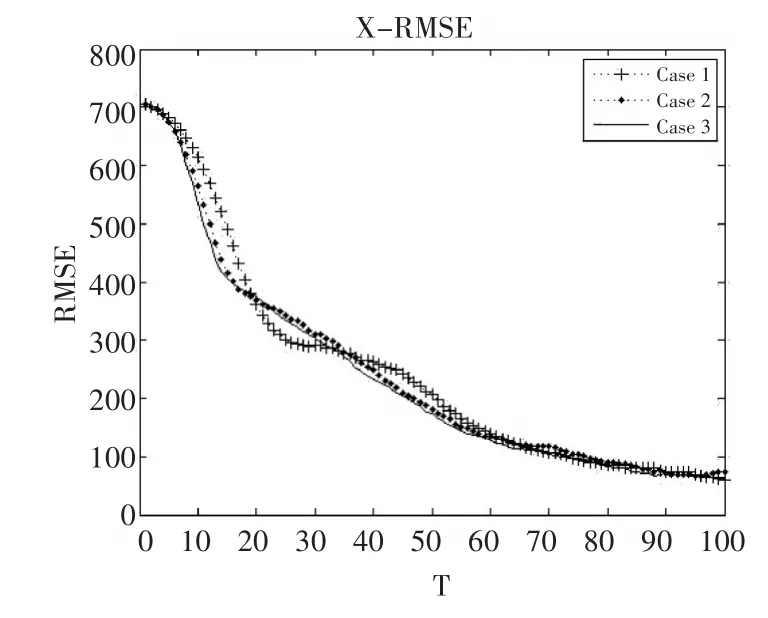
圖5 (c)目標跟蹤誤差曲線

圖5(d)輻射源跟蹤誤差曲線
圖5 (a)與圖5(b)是不同位置噪聲環境下,目標與輻射源的跟蹤誤差曲線。圖5(c)與圖5(d)是不同速度噪聲環境下,目標與輻射源的跟蹤誤差曲線。由圖5(a)到圖5(d)可知,當狀態噪聲增大時,目標定位誤差以及輻射源定位誤差均會隨之增大。同時對比圖5(a)與圖(b),圖5(c)與圖5(d),輻射源定位誤差比目標定位誤差更容易受到隨機噪聲的影響。對比圖5(b)與圖5(d)可知,狀態噪聲中速度分量對于定位誤差的影響要大于位置分量的影響。
6 結語
本文研究了利用非合作運動外輻射源進行運動目標的定位跟蹤問題,將目標運動狀態與輻射源運動狀態作為兩個獨立的狀態向量,分別進行更新,并采取不同的更新順序分別得到對應的狀態估計,經過融合處理后得到最優的狀態估計。這種序貫更新目標與輻射源狀態的方式相比將目標運動狀態與輻射源運動狀態聯立為一個擴展運動狀態的更新方式,能夠有效減小運動狀態維數,防止濾波發散并提高收斂速度,更重要的是,為處理多目標情形預留處理接口,并且方便對目標狀態以及輻射源狀態進行復雜處理。狀態估計交叉融合階段可以更加充分地利用最新時刻的量測信息,以及消除不同更新順序帶來的潛在影響,同時,冗余信息還有助于減小隨機誤差的影響。仿真結果證明,CF-CKF方法可以同時實現目標以及輻射源的定位跟蹤,并且在收斂速度、定位誤差方面均優于UKF、CKF方法。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
