組網雷達多幀檢測前跟蹤算法研究
2019-08-07 00:42:34王經鶴孔令講
雷達學報 2019年4期
王經鶴 易 偉 孔令講
(電子科技大學信息與通信工程學院 成都 611731)
1 引言
多傳感器融合通過利用多個節點的信息,實現傳感器間信息互補。相比于單傳感器,多傳感器系統能夠增加量測的維度和置信度,提高系統容錯性和魯棒性[1,2]。近幾十年,多傳感器融合受到了廣泛的關注,也被應用到越來越多的領域當中[3-10]。其中,組網雷達系統(Netted Radar System, NRS)就是一種典型的例子[11]。組網雷達通過網內多個雷達協同探測,獲取目標多向散射系數,能夠大幅提高對目標的檢測跟蹤能力。目前,組網雷達系統多采用先檢測后跟蹤(Detect Before Track, DBT)的方法,即,本地雷達節點在每個時刻對接收到的回波信號進行單周期門限檢測,得到一些可能是目標的虛警點跡,然后傳遞這些點跡或者由這些點跡跟蹤濾波得到的目標航跡到融合中心進行融合[4,5]。本文定義這種方法為基于先檢測后跟蹤的多傳感器融合(Multi-Sensor Fusion based on DBT, MSFDBT)。MSF-DBT在高信噪比下具有良好的性能,但當信噪比較低時,目標往往很難通過單周期門限檢測,造成本地節點信息損失,導致算法性能嚴重下降。
解決DBT導致的性能損失的一個有效方法是采用多幀檢測前跟蹤技術(Multi-Frame Track Before Detect, MF-TBD)[12-14]。MF-TBD在每個時刻不對回波數據進行門限檢測,而是聯合處理多周期原始回波數據,然后輸出目標檢測結果[12]。由于MF-TBD不對單周期回波數據進行檢測,因此可以更大程度地保留和利用目標信息;另一方面,它能夠聯合利用目標在多幀之間的運動相關性積累目標能量同時抑制噪聲改善信噪比。因此,MF-TBD對低信噪比目標具有很好的檢測能力。
但目前,MF-TBD主要應用在單傳感器系統中,文獻[15-17]研究了利用原始數據或中間結果在融合中心進行MF-TBD的方法,但并未考慮傳遞本地MF-TBD的檢測結果到融合中心進行融合的情況。不同于MSF-DBT, MF-TBD輸出的結果既不是虛警點跡也不是跟蹤濾波后分布已知的目標航跡估計,而是一系列離散的點跡序列且分布未知[18]。因此,現有的融合算法并不直接適用于點跡序列的融合。
針對上述問題,本文對組網雷達下的目標檢測跟蹤算法進行研究,提出了一種基于點跡序列融合的組網雷達多幀檢測前跟蹤算法(Netted Radar System Multi-Frame Track Before Detect based on Plot Sequence Fusion, PSF-MF-TBD),并給出了PSF-MF-TBD的粒子濾波實現方法。本文是對文獻[19]的擴展,在文獻[19]的基礎上,改進了信號模型,并且對算法進行了更詳細的理論推導,同時結合組網雷達系統模型及其問題對算法進行了補充和完善,最后通過仿真實驗對算法進行了驗證。
2 目標與信號模型
2.1 目標運動模型

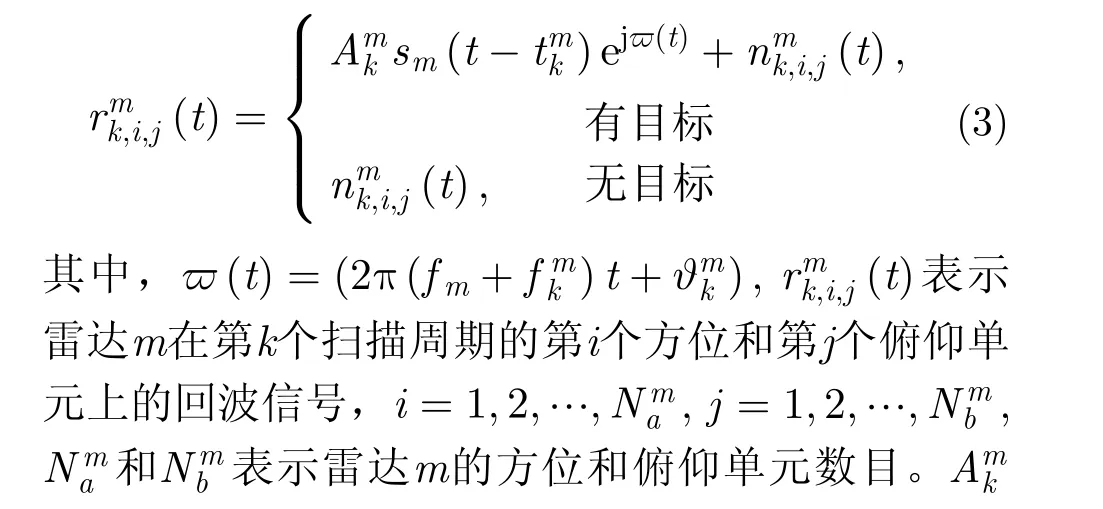
2.2 回波信號模型

3 基于點跡序列融合的組網雷達多幀檢測前跟蹤算法
本節介紹PSF-MF-TBD算法。如圖1所示,PSF-MF-TBD算法由兩部分構成:本地多幀檢測前跟蹤和融合中心的點跡序列融合。
3.1 本地檢測前跟蹤
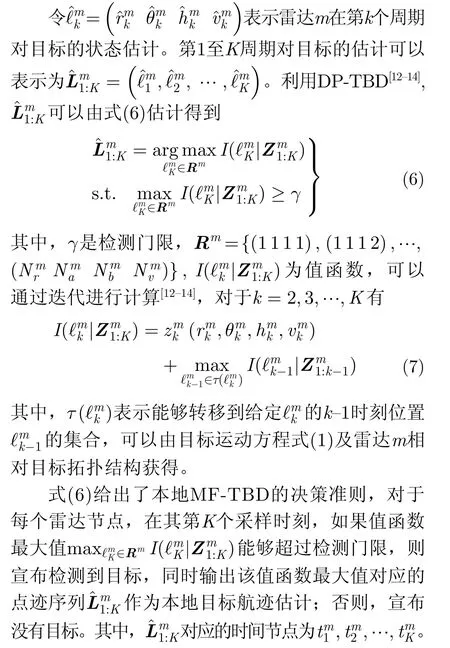

圖1 PSF-MF-TBD算法結構框圖Fig. 1 Block diagram of PSF-MF-TBD
3.2 融合中心的點跡序列處理
各雷達節點在完成本地MF-TBD后,將得到的點跡序列傳遞至融合中心做進一步融合處理,得到目標全局狀態估計。由于MF-TBD輸出結果既不是單幀檢測后的離散點跡,也不是跟蹤濾波后分布已知的準確目標航跡估計,因此現有的融合方法并不適用。另外,受雷達拓撲結構、系統參數等的影響,不同節點間的點跡序列還面臨著時間異步、空間錯位等多種問題,無法直接進行融合。針對這些問題,本節給出融合中心的點檢序列處理方法,具體流程如圖2所示。
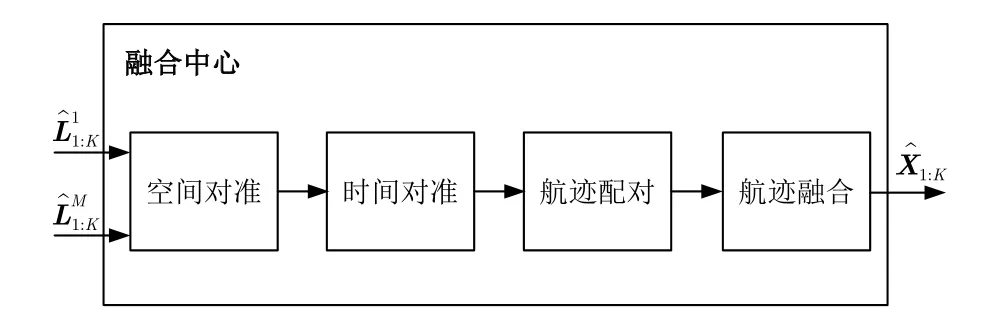
圖2 PSF-MF-TBD算法流程示意圖Fig. 2 Steps of PSF-MF-TBD
3.2.1 空間-時間對準


3.2.2 航跡配對
經過前面的空間對準和時間對準后,可以得到同一坐標系下,不同雷達在同一時間節點的檢測結果。此時可以進行航跡配對。航跡配對主要是對不同雷達的輸出結果按照一定準則兩兩配對,找到同一個目標在不同雷達下的檢測結果,為后續的航跡融合做準備。配對準則的確定和配對順序的設計是該步驟的兩個關鍵點。
(1)配對的準則:本文選擇兩條航跡的位置誤差作為配對標準。如果各時間節點的位置誤差都在允許的范圍內,則認為兩條航跡屬于同一目標。如果一條航跡無法和其它航跡配對,認為其是虛警,將它刪除。
(2)配對的順序:由于值函數大的狀態更有可能是目標狀態,因此在配對時,先選擇值函數最大的航跡與其它航跡配對,配對成功后刪除這兩條航跡,然后重復上面的操作。
3.2.3 航跡融合
經過航跡配對后,每個目標都可以找到不同雷達對它的檢測結果(點跡序列)。利用這些結果進行融合,能夠得到目標狀態全局估計。本文采用最小均方誤差估計(Minimum Mean Square Error,MMSE)準則來實現這一目的。目標的全局估計表示為

4 基于粒子濾波的點跡序列融合算法實現
上一節介紹了PSF-MF-TBD的基本理論,本節研究算法的實現方法。由3.2.3節可以看出,要實現點跡序列的融合,就要求解式(9)。本節首先研究式(9)中的MMSE求解問題,然后給出算法的粒子濾波實現方法。
4.1 MMSE問題求解
首先,本文給出下列結論。

其中,C是一個常數,由式(12)給出

將式(13)代入式(10),再經過一些數學變換,即可證明式(11)。 證畢
4.2 粒子濾波實現算法

將式(11)和式(19)代入到式(18),可以得到

式(20)的證明與單傳感器場景中類似[20],這里不再贅述。
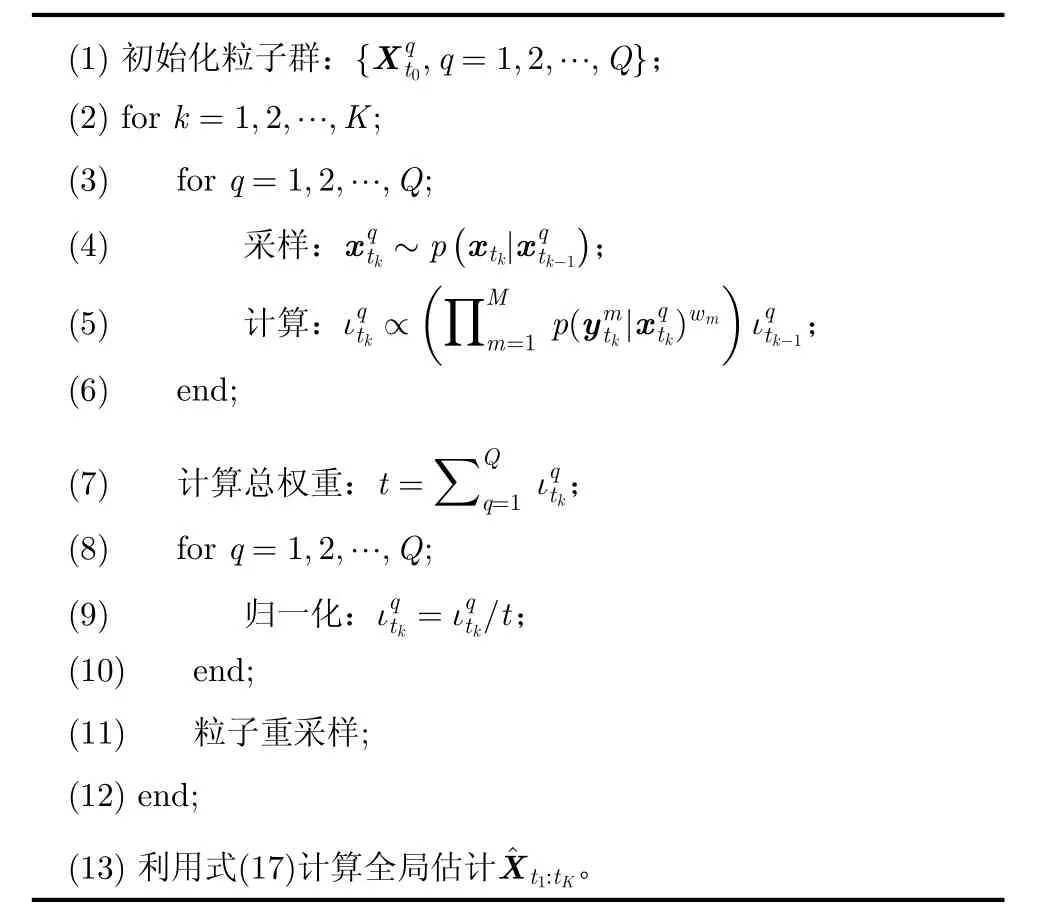
表1 基于粒子濾波的點跡序列融合算法Tab. 1 Plot sequence fusion based on particle filter
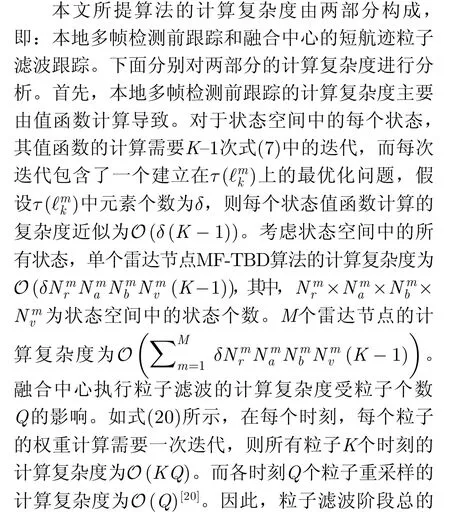
5 算法實現復雜度分析

6 仿真實驗分析
本節對提出的PSF-MF-TBD進行性能評估分析,并將其與傳統的先在本地進行單幀檢測和卡爾曼濾波然后在融合中心進行航跡融合的MSFDBT算法進行對比。此外,為了驗證本文提出的基于粒子濾波的點跡序列融合算法的有效性,仿真中還考慮了另外一種融合方式作為對比,即對多個雷達節點的點跡序列取平均值(稱為平均融合)

仿真中采用文獻[18]中的方法對本地點跡序列進行建模,即
在仿真中假設目標高度為0,即目標在2維X-Y平面運動。仿真場景如圖3所示。仿真參數為:雷達1位置為(0.12, 0.24) km,雷達2位置為(6.00, 4.80) km,雷達1和雷達2的工作頻率為1 GHz,脈沖重復頻率為5000 Hz,帶寬為2 MHz(距離分辨率75 m),方位分辨率0.5°,掃描周期為1 s,起始掃描時刻相同。目標的初始位置為(1.80, 6.00) km,初始速度為(120, 60) m/s,目標做近似直線運動,過程噪聲服從高斯分布,均值為0,協方差矩陣為
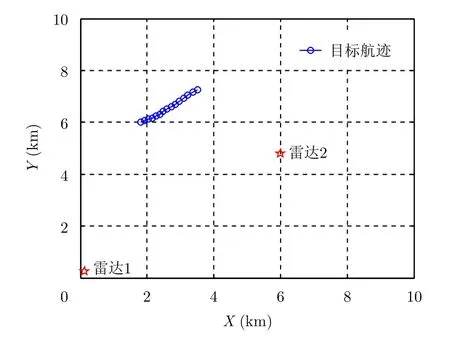
圖3 仿真場景示意圖Fig. 3 Sketch map of the simulation scenario
圖4中給出了一次仿真中算法在各步處理后的仿真結果示意圖,仿真中目標信噪比8 dB, MF-TBD聯合處理幀數K=15,粒子數Q=800。圖4(a),圖4(c)和圖4(b),圖4(d)分別給出了雷達1和雷達2在一個多普勒頻率上的單幀回波數據示意圖,和在本地利用MF-TBD積累后的值函數示意圖。可以看出,由于目標信噪比比較低,單幀回波數據中目標被淹沒在噪聲中,難以發現。但經過多幀積累后,由于目標能量被漸漸積累而噪聲被抑制,因此目標逐漸凸顯處理,積累后的值函數形成一個山峰狀,而峰值點即為目標位置。對比圖4(a),圖4(c)和圖4(b),圖4(d),能夠證明本地利用MF-TBD算法的確可以改善目標信噪比,使弱小目標更容易被發現,進而提高檢測概率。圖4(e)和圖4(f)中分別給出了雷達1和雷達2,對值函數檢測后輸出的本地點跡序列估計。從圖中可以看出,首先,MF-TBD處理可以給出基本準確的目標航跡估計。此外,與文中所述相符,由于不同雷達節點相對目標的位置不同,而每個雷達觀測到的目標位置又都是建立在以自己為中心的極坐標系下,因此,不同雷達節點的本地點跡序列估計是不一樣的,無法進行直接融合。圖4(g)中給出了不同雷達節點的點跡序列做了空時對準后的結果示意圖。可以看出,空時對準后各雷達節點的點跡序列估計被統一到了相同坐標系下,并且基本可以與真實目標航跡吻合(但存在一定偏差)。此時已經可以對航跡進行配對和融合。圖4(h)中給出了融合后的全局估計結果,融合后算法提供了更加精確的目標航跡估計。
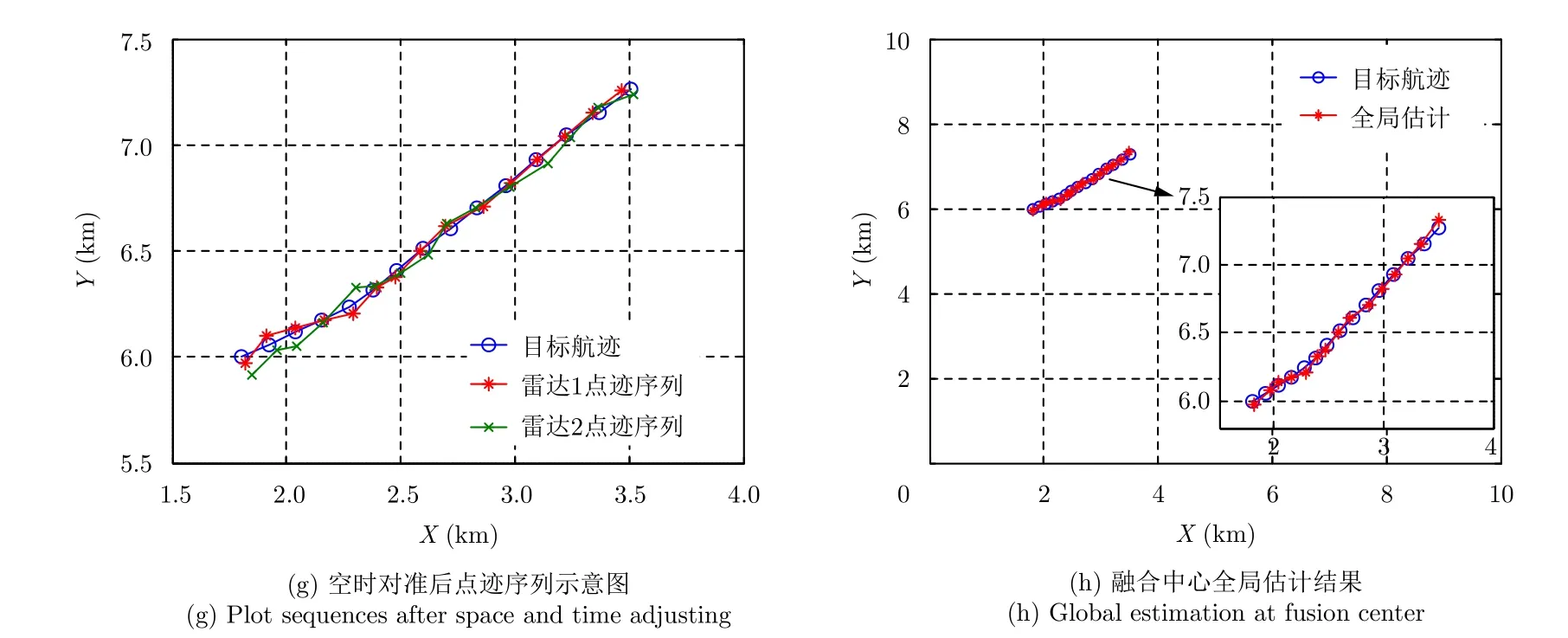
圖4 仿真中算法各階段處理結果展示Fig. 4 Results of a single Monte Carlo run
圖5比較了MF-TBD和SFD在本地雷達節點的檢測概率。可以看出,因為聯合處理幀數越多,能夠利用的目標信息就越多,因此MF-TBD性能隨聯合處理幀數增長。總地來說,相比于SFD, MF-TBD有4~6 dB左右的性能增益。
圖6對比了PSF-MF-TBD和MSF-DBT算法的RMSE,其中PSF-MF-TBD聯合處理幀數K=15,節點數M=2,粒子數Q=800。可以看出,當信噪比較低時,兩種方法的RMSE均隨著時間增長;當信噪比較高時,它們的RMSE能夠比較快地達到穩定。但不管在哪種情況下,PSF-MF-TBD的RMSE始終要小于MSF-DBT算法。這是因為MFTBD在本地的檢測概率更高,其可以獲得更多的目標信息。
圖7給出了PSF-MF-TBD的在不同雷達節點數目下的RMSE,其中目標SNR=10 dB,算法聯合處理K=15幀數據,粒子數目Q=800。可以看出,算法的RMSE會隨著雷達節點的增多而減小。這是因為雷達節點越多,可利用的目標信息也越多,因此估計會越準確。圖8中給出了算法RMSE隨粒子數目的變化關系,其中目標SNR=10 dB, MF-TBD聯合處理K=15幀數據,雷達節點數目M=2。因為粒子數目越多,對后驗分布近似得越準確,因此算法的估計性能也越好。但從圖8(b)中可以看出,當粒子數目足夠多時,算法性能趨于飽和,在不同粒子數下的性能差異非常小。
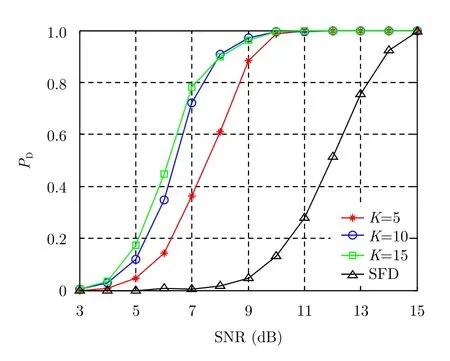
圖5 不同信噪比下MF-TBD與SFD檢測性能對比Fig. 5 Detection probability of MF-TBD and SFD for different SNR
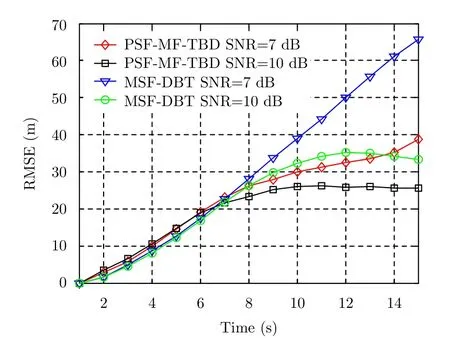
圖6 PSF-MF-TBD與MSF-DBT的RMSE對比Fig. 6 RMSE of PSF-MF-TBD and MSF-DBT
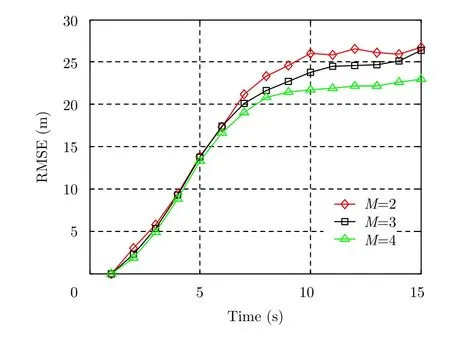
圖7 PSF-MF-TBD在不同雷達節點數目下RMSEFig. 7 RMSE of PSF-MF-TBD under different number of radar nodes
圖9中對比了單站雷達MF-TBD,平均融合方法,以及本文提出的PSF-MF-TBD算法的RMSE。仿真中,MF-TBD聯合處理幀數K=15,粒子數目Q=800。可以看出,對比單站雷達MF-TBD,兩種航跡融合方法的RMSE都有所降低。3種方法中,本文提出的PSF-MF-TBD算法的RMSE最小,相比于單傳感器MF-TBD算法,其跟蹤精度提高了50%左右,證明了其算法的有效性。
7 結論
本文針對組網雷達弱小目標檢測跟蹤問題,提出了PSF-MF-TBD算法。該方法首先在本地雷達節點進行多幀檢測前跟蹤處理,提高弱小目標的發現概率,然后傳遞檢測結果,即點跡序列,至融合中心進行融合,提高目標的航跡估計精度。文中首先給出了算法的理論推導,然后結合實際雷達系統,給出了算法的具體處理流程。最后,為了有效解決點跡序列的融合問題,提出了算法的粒子濾波實現方法。仿真證明,相比于現有組網雷達算法,該方法能夠同時改善目標的檢測概率和跟蹤性能。
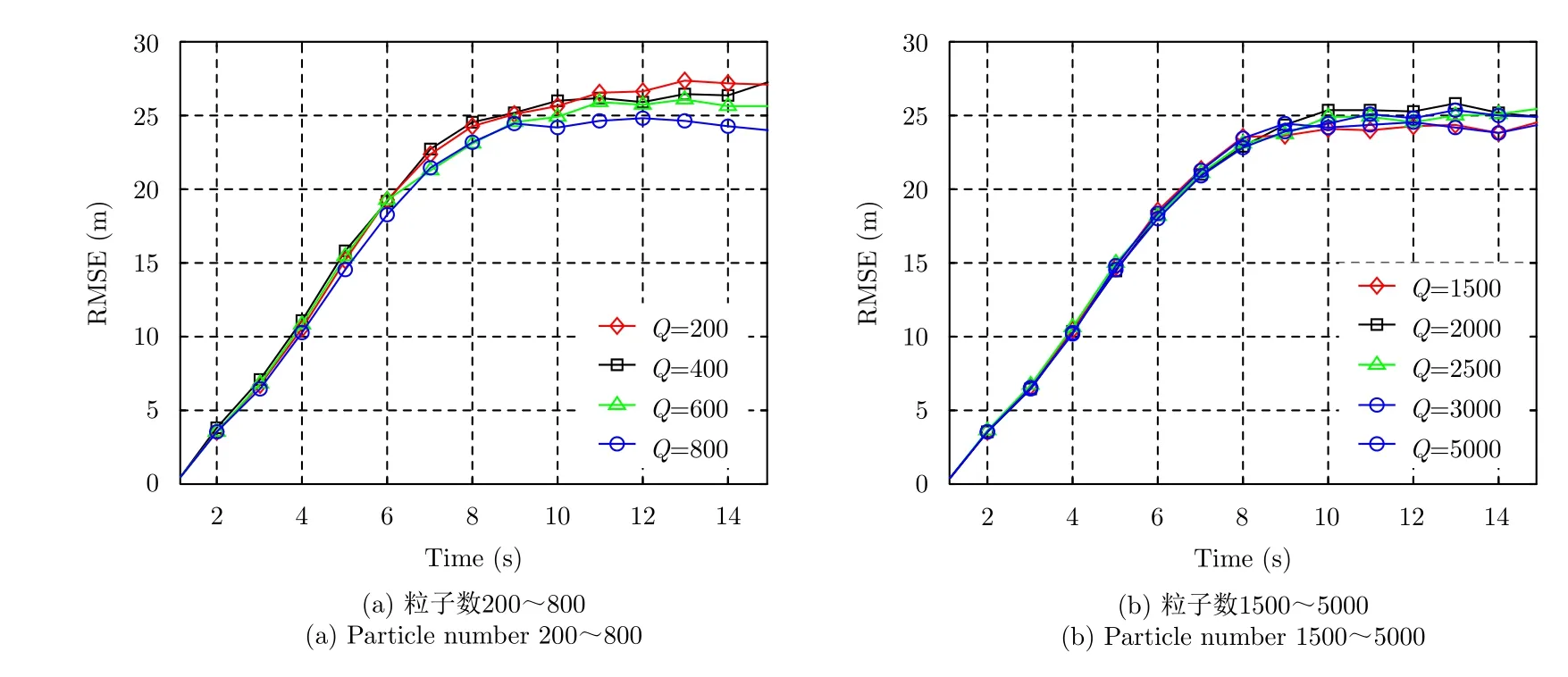
圖8 PSF-MF-TBD在不同粒子數下的RMSEFig. 8 RMSE of PSF-MF-TBD under different number of particle
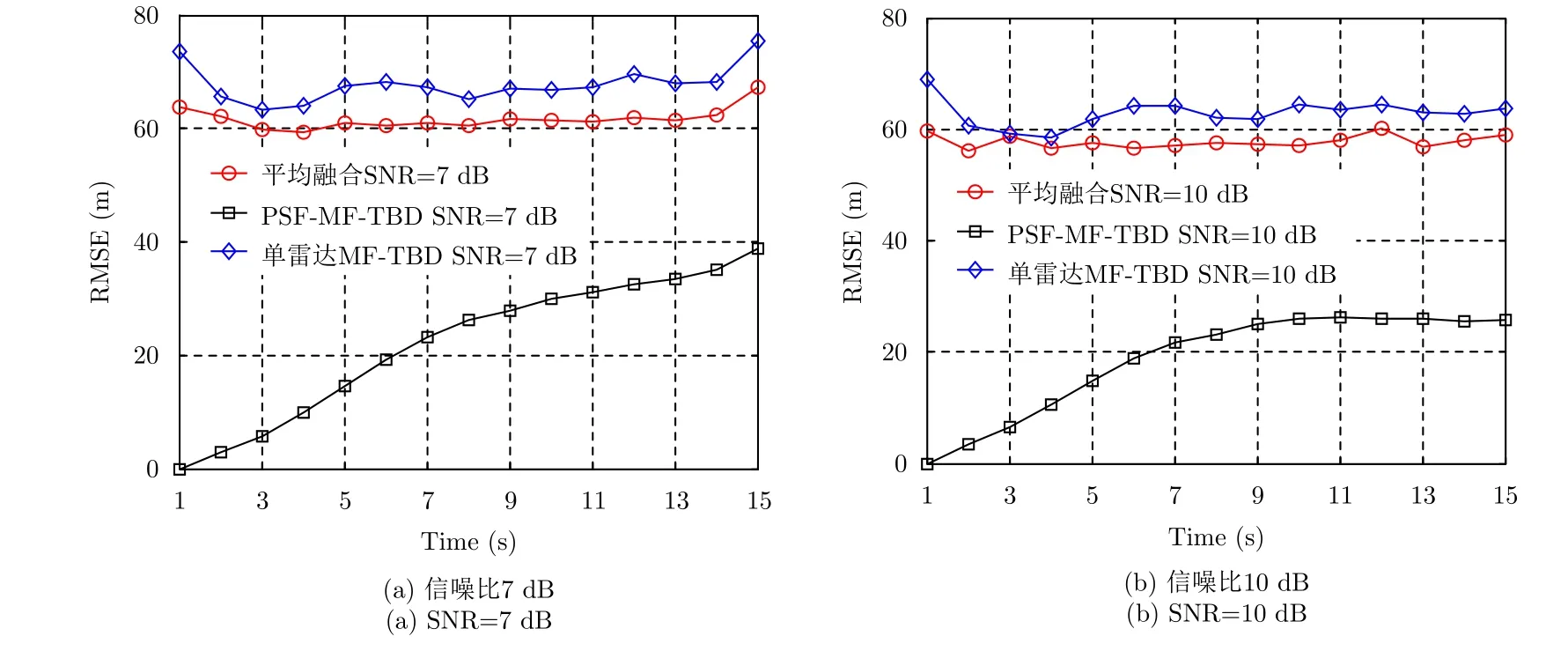
圖9 不同點跡序列融合方法的RMSE對比Fig. 9 RMSE of different plot sequence fusion methods
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
無線電工程(2020年11期)2020-10-29 01:25:46