燃料電池無人機能源管理與飛行狀態耦合
2019-08-15 02:50:08張曉輝劉莉戴月領
航空學報 2019年7期
張曉輝,劉莉,戴月領
北京理工大學 宇航學院,北京 100081
燃料電池無人機是以氫能轉化為電能作為主要動力的無人機。燃料電池作為關鍵部件本質是將氫能轉為電能的發電裝置。與同樣作為綠色長航時的太陽能無人機相比,燃料電池無人機最大的優勢在于不受天氣影響,可適應中低空領域的復雜環境。從而使其成為中低空電動無人機長航時應用需求背景下最具潛力的無人機類型,也是國內外當前研究熱點[1-4]。
目前燃料電池無人機的研究主要集中在總體設計方法[5-7]、結構設計與質量估算[8-9]、燃料電池動力系統設計與試驗特性[10-13]、燃料電池與太陽能電池混合動力特性[14-18]、以及燃料電池能源系統高效管理[18-22]等方面。研究重點主要體現在燃料電池無人機平臺和燃料電池動力系統兩個方面。尚未見到燃料電池無人機最優能量航跡規劃方面的研究工作。
在航跡規劃與能源管理耦合方面,太陽能無人機相關的研究較多。如國外華盛頓大學的Hosseini[23-24]和Edwards[25]等在考慮太陽能無人機運動學的同時考慮了太陽與太陽能電池機翼位置關系,耦合了鋰電池的電量狀態方程,以全天蓄電池剩余電量最大為目標,進行了能量最優軌跡規劃研究。中國學者也展開了基于重力勢能儲能的太陽能飛機軌跡研究[26-28]。借鑒太陽能無人機的研究思路,對于燃料電池無人機同樣也可以進行能源管理與航跡規劃耦合方面的研究。
由于燃料電池的電力特性較軟,即輸出電壓隨輸出電流或功率的增加下降較明顯,且比功率相對較小,通常需要與大比功率的電源配合使用,以滿足無人機大功率的機動要求。蓄電池和超級電容是燃料電池混合動力汽車領域常用的輔助電源。其中,鋰電池相比其他類型蓄電池比能量和比功率均相對較高,是無人機常用動力蓄電池。超級電容雖然具有更高的比功率,但其比能量相比蓄電池小很多,因此,本文的燃料電池無人機即指采用燃料電池和鋰電池混合動力的無人機。
燃料電池無人機的基本能源分配模式是燃料電池作為主要能源用于長時間滯空巡航或繞點盤旋,鋰電池主要用于起飛、爬升以及其他需要大功率機動的情況。研究燃料電池和鋰電池的協同工作模式,對于有效提升兩種能源的效能是十分有意義的,其中爬升過程是燃料電池和鋰電池協同工作的主要階段,也是能源管理與飛行狀態控制耦合最嚴重的階段。
爬升目標高度較高時,將導致能源系統容量不足,無法發揮混合動力系統的優勢。增加鋰電池容量或增大燃料電池功率水平是常見的處理方法,但各有優劣。其中,增加鋰電池容量可降低爬升段的氫氣消耗,但在長航時的低功率巡航段時會帶來更多的死重,從而會導致更多的燃料消耗。而選用更大功率水平的燃料電池以滿足爬升段的大功率需求,不僅使爬升段燃料損耗更多,也造成低功率巡航段剩余功率過多,導致額外氫耗損失。因此,燃料電池和鋰電池的混合量問題是需要綜合考慮短時大功率爬升和長時小功率巡航的需求與氫耗的優化問題。
本文基于燃料電池和鋰電池混合動力無人機方案,針對能源管理與飛行狀態耦合問題,開展了能源管理與航跡規劃耦合的最優控制策略研究,以及燃料電池/鋰電池最優混合研究。首先,綜合考慮能源系統狀態和無人機運動狀態,以動力系統模型為耦合點,建立燃料電池無人機能源與運動狀態耦合模型。其次,以迎角、轉速和燃料電池的放電功率作為控制變量,以氫耗最少為目標,建立最優爬升控制問題,研究不同爬升高度對最優控制過程的影響,并與模糊控制能源管理策略進行對比分析。最后,考慮短時大功率爬升和長時小功率巡航的任務特點,開展了能源系統混合和飛行狀態控制耦合優化研究。針對典型任務剖面,基于飛行運動與動力系統耦合模型,建立了燃料電池/鋰電池最優混合問題,并分析不同巡航目標高度對優化結果的影響。
1 燃料電池無人機系統方案
本文所涉及的燃料電池無人機方案如圖1所示。采用主動能源管理的動力系統拓撲結構[13]為無人機提供動力。高壓儲氫裝置為燃料電池提供氫燃料,燃料電池將氫能轉化為電能后通過功率可控的直流轉直流(Direct Current/Direct Current, DC/DC)轉換器與鋰電池并聯,鋰電池通過電量監測器獲得電流、電壓、功率和電量狀態。DC/DC轉換器主要用于匹配鋰電池電壓,以及控制燃料電池的輸出功率。燃料電池與鋰電池并聯混合后直接為動力系統供電,通過電子調速器(電調)驅動無刷直流(BrushLess Direct Current, BLDC)電機轉動,從而帶動螺旋槳旋轉為無人機提供飛行動力。通過飛行控制器控制電調的油門以控制螺旋槳轉速,并調整飛行的姿態,最終實現規劃航跡飛行。該無人機系統方案為最優能量的爬升研究提供了依托平臺。

圖1 燃料電池無人機方案Fig.1 Scheme for fuel cell powered UAV
2 系統耦合建模
2.1 無人機運動模型
無人機飛行過程某時刻瞬間姿態和受力分析如圖2所示。其中,xb為機體軸方向,θ為俯仰角,v為飛行速度,飛機抬頭以航跡角γ和迎角α飛行,其受力主要由升力L、阻力D、重力W和來自螺旋槳的拉力T組成,假設推力線與機身縱軸一致。由牛頓第二定律推導出其飛行過程質心移動方程和剛體轉動方程為
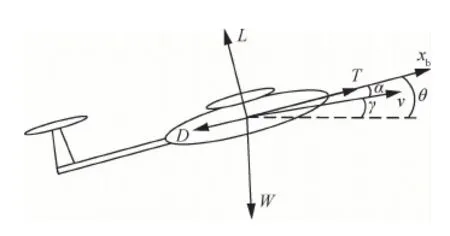
圖2 姿態和受力分析Fig.2 Attitude and force analyses
(1)
(2)
(3)
式中:h為飛行高度;m為無人機質量;g為重力加速度。由空氣動力學理論可得升力和阻力計算表達式為
(4)
(5)
其中:ρ為當地空氣密度;S為飛機參考面積;CL為升力系數;CD為阻力系數。考慮無人機飛行過程迎角變化不大,氣動力系數處在線性區域,則可得
(6)
(7)

2.2 能源系統模型
根據圖1所示的系統方案,能源系統主要由燃料電池,鋰電池以及DC/DC轉換器組成。燃料電池消耗氫氣轉化為電能用于支持飛行或為鋰電池充電。而DC/DC轉換器作為燃料電池與鋰電池能源管理的直接執行部件實現對燃料電池輸出功率的直接控制。
2.2.1 燃料電池模型
為簡化優化問題以方便求解,燃料電池模型僅考慮氫氣消耗率模型,在可用最大功率的約束下,忽略電壓和電流的動態調節過程,采用穩態模型[29],可得其氫氣消耗率為
(8)

2.2.2 鋰電池模型
鋰電池模型采用內阻模型[25],則鋰電池的功率和當前剩余電量分別為
(9)
(10)
式中:Pb為鋰電池功率;Voc為鋰電池開路電壓;Ib為鋰電池電流;Rint為鋰電池內阻;SOC為當前剩余電量;SOC0為初始電量;Qb為鋰電池容量。
由式(10)兩邊同時對時間求導可得
(11)
而由式(9)可得鋰電池的電流為
(12)
式中:Ib為正時代表鋰電池放電,為負時表示充電。聯立式(11)和式(12)可得鋰電池電量的動態方程為
(13)
其中:開路電壓和內阻并不是常值,而是與當前剩余電量有關。而通常鋰電池最大充放電功率(Pchrg和Pdchg)受限于容量和充放電倍率(Cchrg和Cdchg),即
(14)
2.3 動力系統模型
動力系統主要由電子調速器、電機和螺旋槳組成,動力系統將功率轉化為機械功率輸出,驅動飛機正常飛行。一般電子調速器和電機的效率較高且變化較小,本文可假設電子調速器的效率ηesc為95%,電機的效率ηmotor為80%。
螺旋槳將電機轉速轉化為拉力,同時產生附加氣動扭矩,根據螺旋槳渦流理論可得螺旋槳拉力和扭矩為
(15)
(16)
式中:ω為槳轉速,rad/s;Rp為槳半徑;CT和CQ分別為槳拉力系數和扭矩系數。
拉力系數CT和扭矩系數CQ都是關于前進比J的函數,而前進比的本質是飛行速度v和槳轉速ω的關系,即
(17)
2.4 模型耦合分析
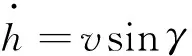
通過動力模型和控制模型,無人機飛行運動模型與能源系統模型耦合關系如圖3所示,其中VH2為氫氣消耗量,f(·)為氫耗率與燃料電池功率的函數。
無人機運動模型將飛行狀態如速度傳遞給動力模型,動力模型接受來自控制器模型的轉速控制,將產生的拉力作用于無人機模型。需求機械功率轉為需求電功率PD:
PD=ωM/(ηescηmotor)
(18)
然后傳遞給控制模型,通過合理地控制DC/DC輸出功率Pdc和鋰電池功率Pb以滿足需求功率,即
PD=Pdc+Pb
(19)
考慮DC/DC的轉化效率ηdc得到燃料電池的輸出功率Pfc為
Pfc=Pdc/ηdc
(20)
將鋰電池和燃料電池的功率傳遞給電源模型后,獲得鋰電池電量和氫氣消耗情況,進而作為飛行控制和能源管理的依據。
圖3 模型耦合分析Fig.3 Analysis of models coupling
3 耦合最優控制策略
3.1 耦合最優控制問題建立
燃料電池無人機飛行控制影響飛行狀態和需用功率,不同的需求功率情況影響燃鋰之間的功率分配、電量狀態以及氫氣消耗,而能源管理也會影響飛行機動過程和航跡規劃。因此,能源管理和飛行狀態是相互影響的耦合關系,可以綜合考慮。
以氫氣燃料消耗最少為目標,以迎角α和螺旋槳轉速ω為飛行控制變量,以燃料電池輸出功率Pfc為能源系統控制變量,從初始狀態X0飛行至目標狀態Xf,同時滿足飛行狀態約束和能源系統狀態約束,進行綜合飛行控制和能源管理,即能源管理與航跡規劃耦合的最優控制策略,簡稱耦合最優控制策略,將該耦合最優控制問題按照最優控制的標準表達如下。
最優控制指標:
(21)
狀態方程組:
(22)
狀態邊界:
(23)
控制邊界:
(24)
其他約束:
(25)
Pbmin≤Pb≤Pbmax
(26)
式(21)~式(26)中:下標min和max表示對應參數的最小值和最大值。
本文選擇計算性能較高的hp自適應Legendre-Gauss-Radau (LGR)正交配點法求解式(21)~式(26)的最優控制問題。該方法將連續的狀態變量和控制變量在高斯點上進行離散,繼而以離散點為結點構造拉格朗日多項式以近似控制變量和狀態變量,將最優控制問題轉化為具有代數約束的非線性規劃問題,從而可使用非線性規劃求解器NLP進行求解。
3.2 爬升過程氫耗最少耦合最優控制
燃料電池無人機爬升過程是燃料電池與鋰電池協同工作的主要階段,需求功率一般是整個任務剖面中的峰值功率,大于燃料電池的最大功率,需要鋰電池配合使用。燃料電池無人機氫耗最少的爬升過程的運動特點和能源管理特點可以采用耦合最優控制策略進行研究分析。
本文以澳大利亞航空探測無人機公司研制的Aerosonde無人機[30-32]為例,在不改變其氣動外形和總重情況下,進行燃料電池混合動力系統改裝,其氣動特性和質量等參數如表1所示。
選用國產EOS600空冷自增濕質子交換膜燃料電池[13]。假設氫氣流率隨電流線性變化過程有5%的排氣損失流率,則λp可取為1.05。燃料電池伏安特性的試驗值和對應氫氣消耗率隨功率的變化如圖4所示。
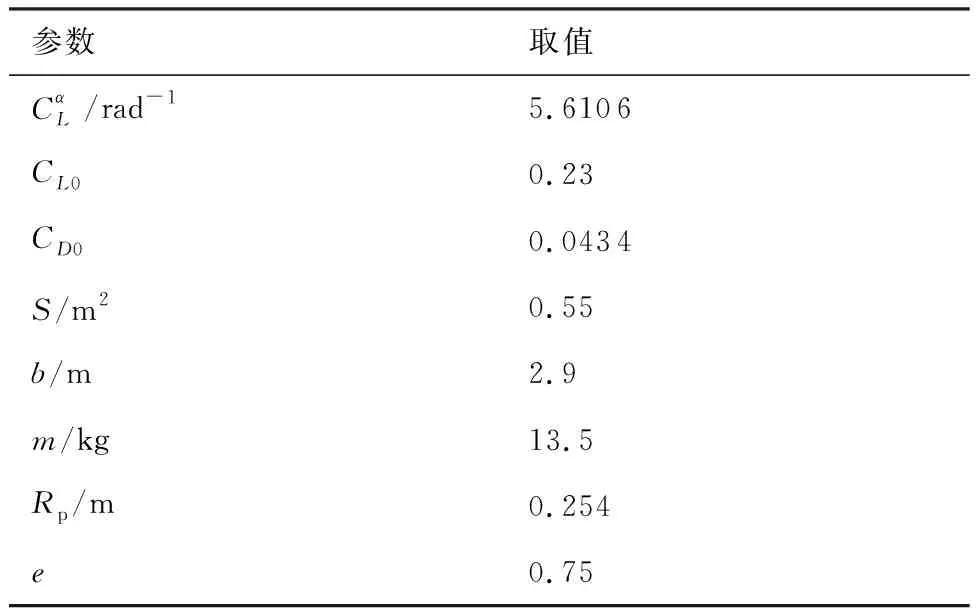
表1 無人機質量和氣動參數Table 1 Mass and aerodynamics parameters of UAV
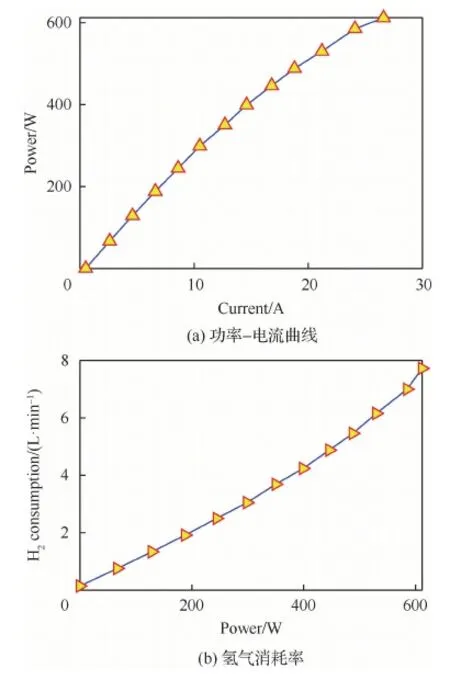
圖4 燃料電池電力特性Fig.4 Electric characteristics of fuel cell
以無人機常用的國產格氏6s鋰電池作為混合動力系統的輔助電源,其額定容量為2 Ah,試驗測得開路電壓和內阻隨電量的變化如圖5所示。可見電量SOC低于0.3時,內阻會急劇增大,開路電壓也急劇降低,當SOC在[0.30, 1.00]區間內,內阻Rint較低且幾乎不變,而SOC與開路電壓Voc近似呈線性關系,此區間是鋰電池的最佳工作區間。
Aerosonde無人機所配螺旋槳的半徑Rp為0.254 m,該槳的氣動參數來自于風洞試驗,其拉力系數和扭矩系數隨前進比J的變化如圖6所示。
設定爬升過程各邊界約束取值如表2所示,其中vstall為失速速度。
無人機在執行爬升任務時通常預先指定爬升目標高度,而當燃料電池/鋰電池混合動力無人機能源系統確定時,不同的爬升高度對最優爬升狀態和控制的影響也不同。表3給出爬升初末狀態(對應參數的下標分別為0和f)和選取的低、中、高3種爬升目標高度(Hf)。
圖7給出了選取的3種目標高度所對應的爬升過程狀態量的變化。圖7(a)顯示了高度隨時間的變化,可見目標高度不僅影響爬升時間,也對爬升率有一定的影響。圖7(b)為爬升速度隨時間的變化,不同目標高度的最優速度基本在下邊界附近,在初始平飛轉爬升的過渡過程會產生小幅的波動。圖7(c)為不同目標高度下航跡角的變化情況,可見初末端的過渡過程航跡角波動較大,但都滿足給定的5 (°)/s的角度率約束。目標高度較低時(200 m),爬升航跡角也較低,基本在5°附近;目標高度中等時(400 m),航跡角增大,甚至大于目標高度為800 m時的航跡角。圖7(d)為爬升過程鋰電池電量變化,目標高度為200 m和400 m時,SOC下降軌跡部分重合,下降率明顯大于目標高度為800 m時的情況,且最終都降到了下邊界0.3。圖7(e)為迎角的變化情況,與航跡角相似,初末端機動過程迎角出現波動,但波幅控制在2°以內,穩定爬升段迎角隨高度增加略有增大,但整體基本處于4°~6°的合理區間。圖7(f) 為爬升過程螺旋槳轉速的變化情況,3種目標高度變化趨勢與航跡角的變化情況相似。目標高度為200 m和400 m時,爬升過程轉速基本不變,目標高度為400 m時,爬升過程轉速最高,以產生足夠大的推力支持大航跡角爬升;目標高度為800 m時,轉速隨時間和高度的增加緩慢降低,導致航跡角緩慢降低。因為目標高度較低或適中時,鋰電池容量足以支持整個爬升過程,而爬升高度較高時,鋰電池容量不足,為了滿足爬升需求,降低需求功率,減緩當前電量SOC的減少速率,以維持更長時間放電。
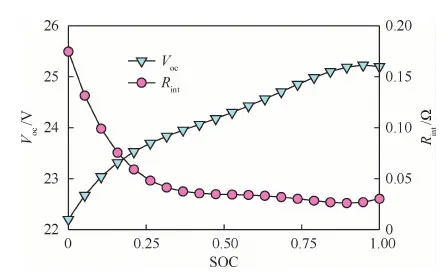
圖5 Voc和Rint隨SOC的變化曲線Fig.5 Variation curvers of Voc and Rint with SOC
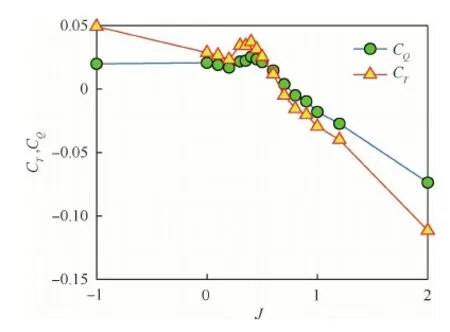
圖6 螺旋槳拉力系數和扭矩系數Fig.6 Propeller thrust and torque coefficients
表2 邊界約束取值Table 2 Values of boundaries
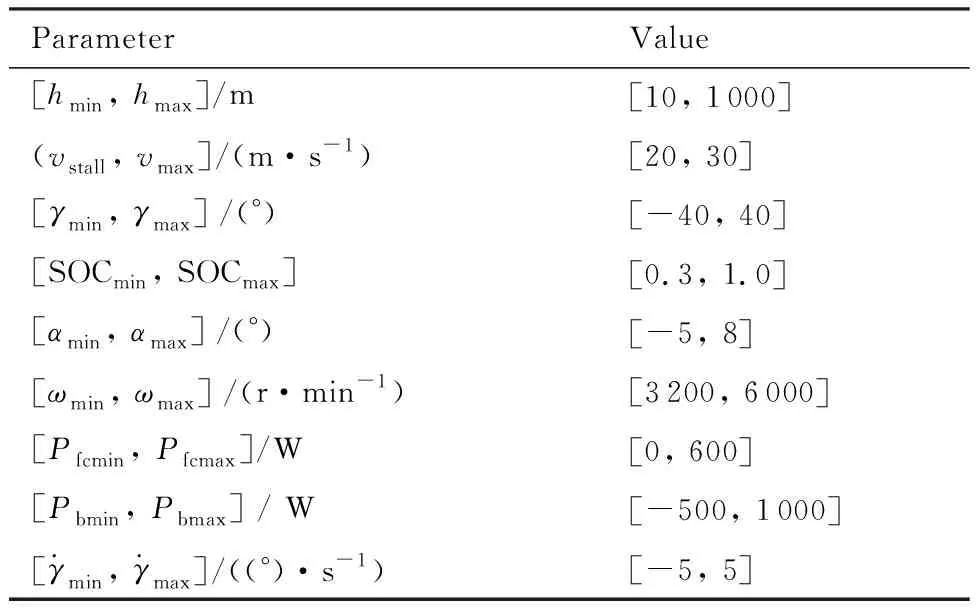
ParameterValue[hmin, hmax]/m[10, 1000](vstall, vmax]/(m·s-1)[20, 30][γmin, γmax]/(°)[-40, 40][SOCmin, SOCmax][0.3, 1.0][αmin, αmax]/(°)[-5, 8][ωmin, ωmax]/(r·min-1)[3200, 6000][Pfcmin, Pfcmax]/W[0, 600][Pbmin, Pbmax] / W[-500, 1000]γmin,γmax]/((°)·s-1)[-5, 5]
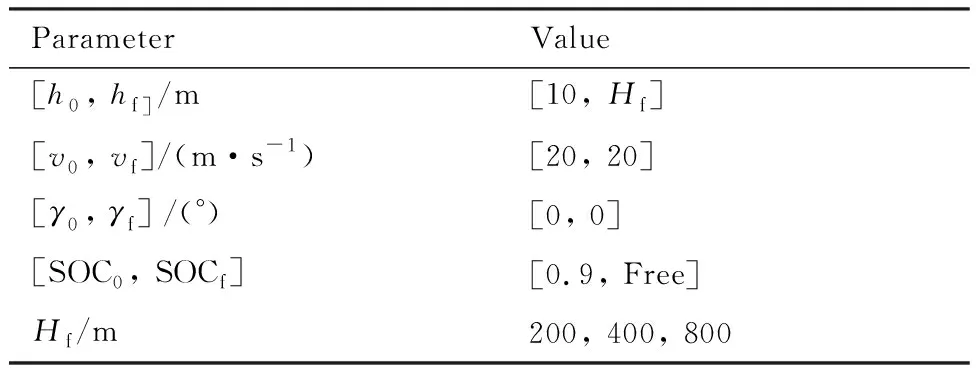
表3 初始和末端狀態Table 3 Initial and final states
圖8為3種目標高度所對應的功率流分配過程。由圖8(a) 可見當目標高度較低時(200 m),鋰電池以最大功率放電,由于鋰電池的容量足夠爬升過程的能耗,從而僅鋰電池放電以節省氫氣。
圖8(b)顯示目標高度適中時(400 m),僅靠鋰電池不足以支撐整個爬升過程,燃料電池和鋰電池需同時供電,輸出功率更大,從而螺旋槳轉速和航跡角更大;接近目標高度前,鋰電池始終以最大功率放電,因此SOC軌跡與200 m目標高度時的部分重合;整個過程燃料電池以較小功率輸出,以節省氫氣,且跟隨需求功率略有波動。圖8(c)顯示爬升目標高度較高時(800 m),燃料電池和鋰電池混合輸出,且燃料電池作為主要能源以最大功率水平輸出,而鋰電池以較小的功率跟隨需求功率逐漸下降。其原因在于當前的燃料電池和鋰電池混合中,鋰電池容量明顯不足,燃料電池已達到最大輸出功率,只能通過改變飛行狀態降低需求功率彌補能源不足矛盾。
可見爬升目標高度對能源系統功率流的最優分配影響較大,也說明飛行狀態和能源系統耦合密切,相互影響。在給定燃料電池和鋰電池混合量的情況下,氫耗最少爬升的最優控制過程要求飛行能耗最小的同時,優先使用鋰電池。鋰電池容量和功率水平充足時,爬升過程僅采用鋰電池;鋰電池容量適當時,燃料電池和鋰電池混合輸出,鋰電池可以發揮大功率優勢;而鋰電池容量不足時,燃料電池以最大功率輸出,鋰電池則以小功率輸出,無法發揮鋰電池高比功率的特點。雖然選擇大容量的鋰電池可以滿足爬升段氫耗最少,甚至無氫耗,但會導致長航時低功率巡航段能源系統死重更大,造成更多氫耗損失。因此,合理的燃料電池和鋰電池混合量不僅需要考慮大功率爬升段,更要考慮長航時的巡航段。
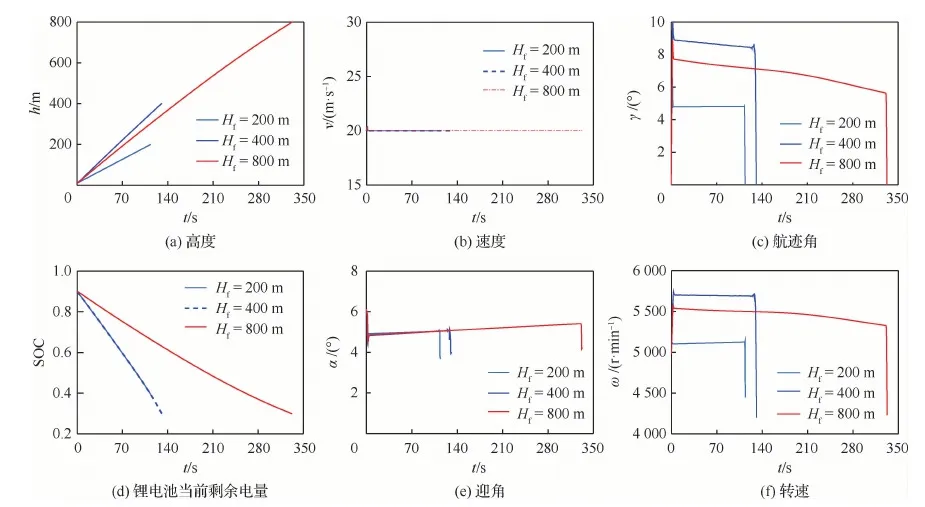
圖7 不同目標高度下爬升過程狀態量和控制量的變化Fig.7 Variation of flight state and control during climb process for different target altitudes
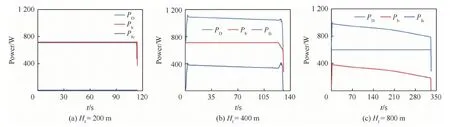
圖8 不同目標高度下的功率分配Fig.8 Power allocation for different target altitudes
3.3 與模糊控制策略對比分析
為了對比說明耦合最優控制策略的特點,將其與只考慮能源系統狀態的模糊控制策略[33]進行對比分析。該模糊邏輯策略以當前需求功率PD和當前鋰電池電量SOC為輸入,以期望燃料電池功率Pfc為輸出。模糊子集定義為{很高(VH),高(H),中等(M),低(L),很低(VL)},模糊邏輯控制規則庫如表4所示,變量成員函數如圖9 所示,該策略具體細節參見文獻[33],其采用了相同的EOS600燃料電池進行了在線試驗研究。
針對3.2節的3種目標高度的爬升任務,為確保可比性,采用耦合最優控制策略所得出的需求功率作為模糊邏輯策略的輸入,鋰電池初始電量也為0.9。兩種策略下鋰電池的功率和電量狀態如圖10所示。可見,當爬升目標高度較低或適中時,給定鋰電池容量相對充足,與只考慮能源系統狀態的模糊控制策略相比,耦合最優控制策略中鋰電池的輸出功率更大,如圖10(a)和圖10(c)所示,從而鋰電池電量消耗更多,末端SOC明顯更低,如圖10(b)和圖10(d)所示。當爬升高度較高時,鋰電池容量明顯不足,兩種策略下鋰電池輸出功率均較高且相差不大,電量狀態SOC曲線下降軌跡基本一致,如圖10(e)和圖10(f)所示。
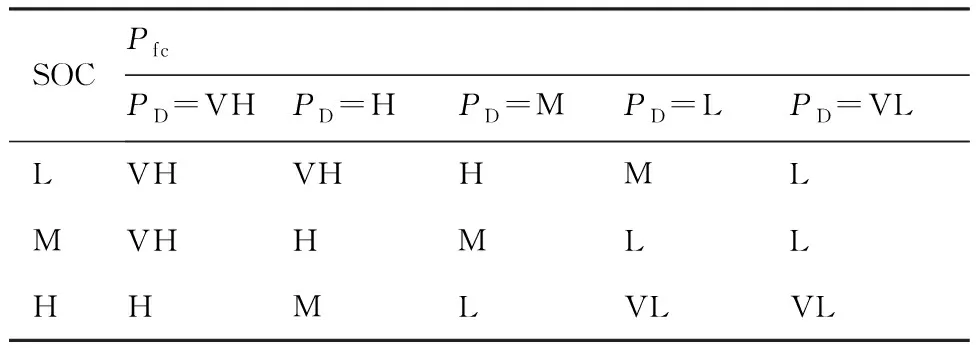
表4 模糊邏輯控制規則庫Table 4 Rule base for fuzzy logical control

圖9 模糊邏輯策略成員函數Fig.9 Membership functions of fuzzy logical strategy
圖11為耦合最優控制策略與模糊控制策略下燃料電池輸出功率和氫氣消耗量對比。其中,圖11(a)顯示爬升目標高度較低時(200 m),采用耦合最優控制策略,燃料電池幾乎無輸出,僅鋰電池即可滿足爬升需求;而在模糊控制策略下,由于爬升需求功率處于較高的狀態,遵照模糊規則,燃料電池需要以較大的功率配合鋰電池輸出。當爬升目標高度適中時(400 m),模糊控制策略下燃料電池始終以接近最大功率輸出,且明顯高于耦合最優控制策略下的燃料電池輸出,如圖11(b) 所示。當爬升目標高度較高時,由于鋰電池容量不足,燃料電池在兩種策略下都必須在最大功率附近輸出,且相差不大,如圖11(c)所示。
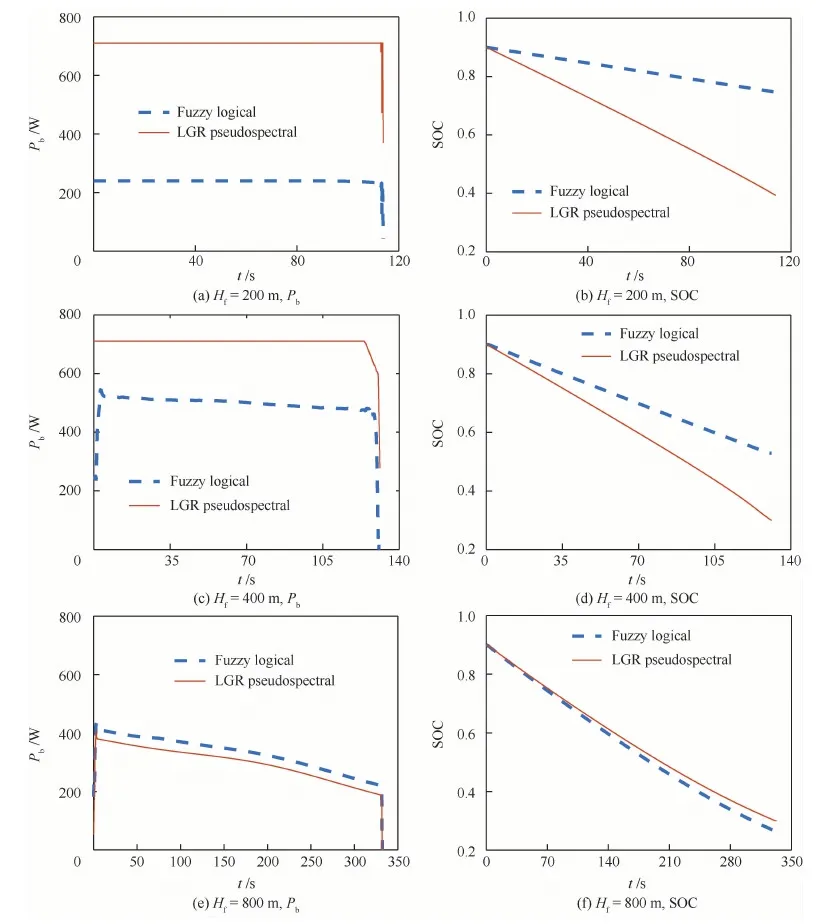
圖10 不同目標高度下兩種策略的鋰電池功率和電量對比Fig.10 Comparisons of lithium battery power and SOC for both strategies with different target altitudes
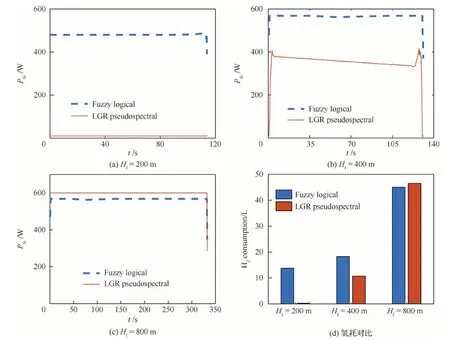
圖11 不同目標高下兩種策略的燃料電池功率和氫耗對比Fig.11 Comparisons of fuel cell power and H2 consumption for both strategies with different target altitudes
耦合最優控制策略與模糊控制策略的氫耗量對比如圖11(d)所示。爬升目標高度適中或較低時,管理與航跡規劃能源耦合的最優控制策略明顯更節省燃料。本例目標高度為200 m時,相比模糊控制策略,耦合最優控制策略節省了98%的氫氣;目標高度400 m時,則節省了42%的氫氣;目標高度800 m時,氫耗量相差不超過3%。
從策略本身分析氫耗差異的原因主要有兩點:① 模糊控制策略只考慮了當前時刻下的能源系統狀態和功率需求情況,根據工程經驗做出的合理功率分配,并不是以氫耗最優為目標的策略;耦合最優控制策略則是全局任務過程滿足飛行狀態和能源系統狀態約束,以氫耗最優為目標的功率分配過程,屬于預先規劃策略。② 爬升過程需求功率都是處于高(H)或很高(VH)的狀態,根據模糊控制規則,如表4所示,無論蓄電池電量狀態如何,燃料電池輸出功率都是處于中(M)、高(H)、或很高(VH)的狀態,以配合蓄電池共同輸出;而耦合最優控制策略則是考慮全部任務過程,將時間、狀態量和控制量離散,以氫耗最少為目標,在給定能源和飛行狀態約束的條件下,同時優化整個功率分配過程和飛行控制過程,從而當鋰電池容量相對充足時,采用耦合最優控制策略優勢也更明顯;而鋰電池容量嚴重不足時,氫氣消耗幾乎沒有可優化的空間。
4 考慮長航時的最優燃鋰混合問題
只考慮爬升過程顯然僅增大鋰電池容量最節省氫氣,但燃料電池無人機作為一種長航時電動無人機,爬升過程僅占很短的時間,絕大部分氫氣主要在長時間巡航過程中被消耗,因為巡航過程需求功率較低,主要由燃料電池供電。若增加鋰電池容量雖可降低爬升段的氫氣消耗,但會導致低功率巡航段的死重增大,從而消耗更多氫氣;若選用更大功率水平的燃料電池滿足爬升段的大功率需求,不僅使爬升段燃料消耗更多,也會造成低功率巡航段燃料電池剩余功率增大,導致額外氫耗損失。因此,考慮長航時任務的燃料電池和鋰電池最優混合問題,需要綜合考慮短時爬升段的大功率需求,以及小功率長時巡航段的低能耗需求。
4.1 燃鋰混合優化問題建立
對于如圖12所示的典型任務剖面,無人機以γ角爬升,經歷t1時間達到巡航目標高度Hf,然后進行長時間巡航,經歷t2時間后進入無動力下降階段。爬升段需求功率較大,需要燃料電池和鋰電池混合同時輸出;巡航段需求功率較小,僅燃料電池即可滿足飛行需求。
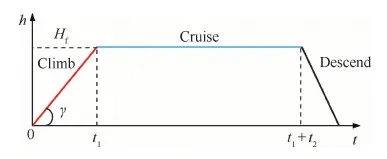
圖12 典型任務剖面Fig.12 Typical mission profile
設定下標1代表爬升段,下標2代表巡航段,Const為常量,PbMax為鋰電池最大放電功率,計算方法如式(14),而Pb1和Pb2分別為鋰電池在爬升和巡航過程中的實際放電功率,Depth為鋰電池允許放電深度。Pfc1和Pfc2分別為爬升和巡航過程燃料電池的放電功率。PD1和PD2分別為爬升和巡航階段的需求電功率,具體計算方法如式(18)所示,動力系統模型參考式(15)~式(17)。可建立燃料電池/鋰電池混合優化問題如下,其中無人機總質量m分為可優化的燃料電池質量mf和鋰電池質量mb,及其他固定不變質量mc。
Find:
Objective:
Subject to:
4.2 最優燃鋰混合與飛行狀態
仍以Aerosonde無人機為例,其中mc=10 kg。采用常用的6s格氏鋰電池,其容量與質量的關系如圖13(a)所示。考慮電池使用壽命和健康度,假設所選鋰電池充放電倍率控制在區間[-5, 16] C。一般同型號燃料電池的比功率為定值,以EOS系列燃料電池為例,根據600、 1 200、1 800、3 450 W的電堆數據,其質量與功率水平的關系如圖13(b)所示。擬合后鋰電池質量隨容量的變化,以及燃料電池質量與功率水平的關系為
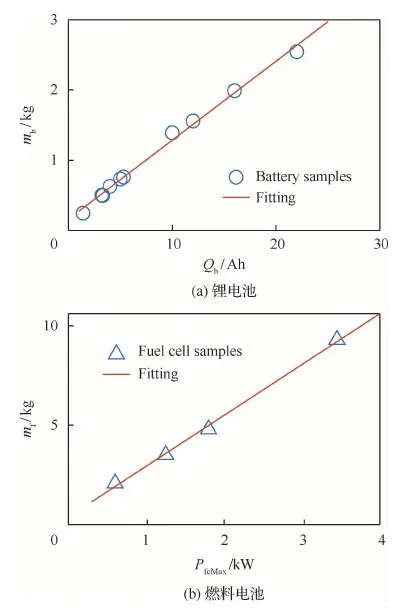
圖13 鋰電池容量和燃料電池功率水平隨質量的變化Fig.13 Variation of lithium battery capacity and fuel cell power level with mass
mb=0.112 4Qb+0.160 9
(27)
mf=0.002 6Pfc+0.379 2
(28)
設定飛行目標高度Hf為1 000 m,巡航時間t2為10 h,鋰電池放電深度Depth為 70%,等同于SOC下邊界為0.3,以避免鋰電池過放。采用SQP(Sequence Quadratic Pragram)優化方法對問題進行求解,結果如表5所示。
優化后燃料電池無人機總質量為12 kg,其中燃料電池質量為1.3 kg,鋰電池質量為0.7 kg,飛行消耗的氫氣為2 940 L,標況下約264 g,僅占總質量的2%。爬升過程需求功率達到1 760 W,巡航功率僅為347 W,巡航功率僅為爬升功率的20%。但燃料電池放電比在爬升和巡航過程始終為1,說明爬升和巡航過程燃料電池始終以最大功率放電,爬升不足的功率由鋰電池補充;巡航過程則僅燃料電池輸出即可,從而盡可能減少鋰電池的質量,避免長時間巡航過程由于能源系統質量冗余導致更多氫耗。爬升和巡航迎角均處于8°以下的合理范圍之內;爬升過程螺旋槳轉速接近最大極限,巡航過程轉速較低;爬升航跡角為10.2°,處于合理范圍之內,爬升速度則取到下邊界,說明較小的速度飛行所需功率較小,更節省燃料。
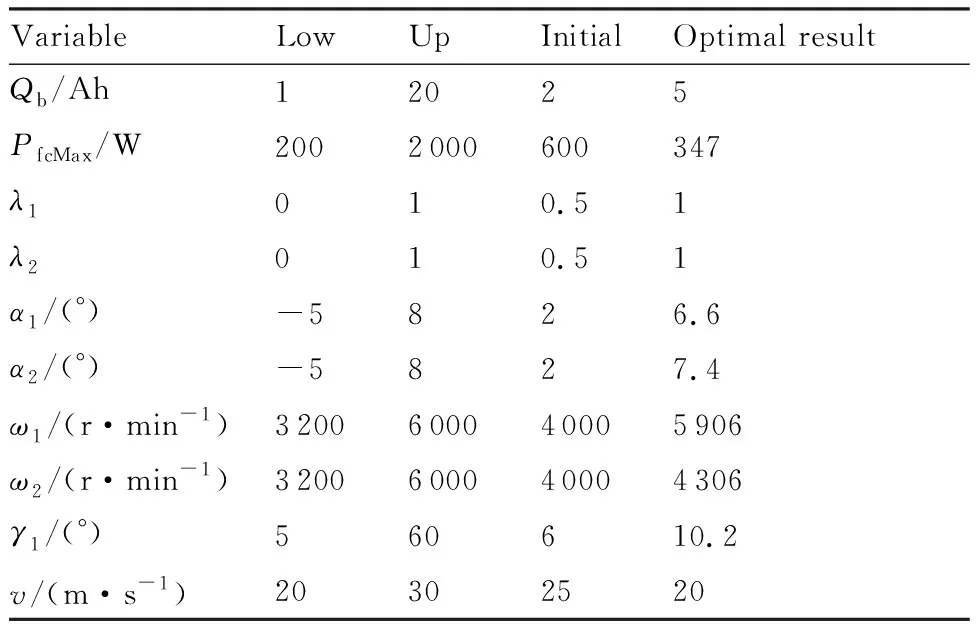
表5 優化變量范圍、初值和結果
表6給出了3種典型能源系統混合方案對最優燃料電池放電比和氫氣消耗量的影響。僅采用燃料電池(Only fuel cell),則燃料電池功率水平需達到936 W,但在巡航過程放電比僅為0.4;采用EOS600燃料電池的最優混合方案(Hybrid EOS600)鋰電池容量為4 Ah,燃料電池巡航過程放電比提升到0.6;而燃鋰最優混合方案(Optimal hybrid)燃料電池放電比始終為1,燃料電池功率水平和質量無冗余。相比僅采用燃料電池方案和指定EOS600燃料電池的最優混合方案,燃鋰最優混合方案中燃料電池功率水平分別減少了63%和42%,氫耗量則分別減少了9%和3%。
表6 3種典型能源混合方案性能對比
Table 6 Performance comparison of three typical hybrid power schemes
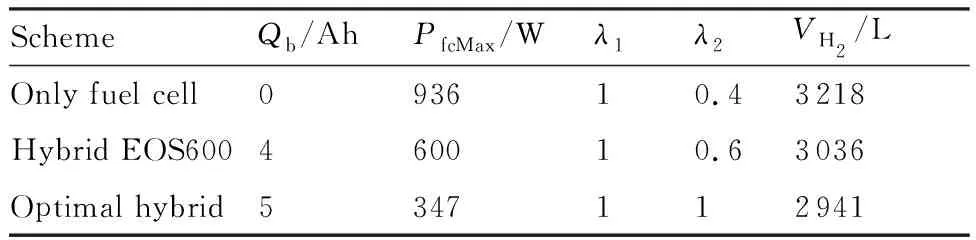
SchemeQb/AhPfcMax/Wλ1λ2VH2/LOnly fuel cell093610.43218Hybrid EOS600460010.63036Optimal hybrid5347112941
4.3 巡航高度對最優狀態的影響
由第3節可知巡航目標高度對能源系統的最優功率分配過程影響較大,并對鋰電池的容量,燃料電池/鋰電池的混合量,以及無人機的飛行狀態有影響。因此,本節針對圖12的典型任務剖面,基于4.2節的最優燃鋰混合算例,研究了巡航高度由200~2 000 m變化過程中,不同巡航高度對最優燃/蓄混合和飛行狀態的影響。
圖14(a)為燃料電池和鋰電池的最優混合狀態,可見鋰電池容量和燃料電池功率水平隨巡航高度增加幾乎呈線性增加,但鋰電池容量增加幅度較為明顯,爬升高度增大到2 000 m時,鋰電池容量相比200 m時增加了738.4%;燃料電池功率僅增大了5%。電源系統質量增加導致無人機質量也隨巡航高度近似線性增加,如圖14 (b)所示。
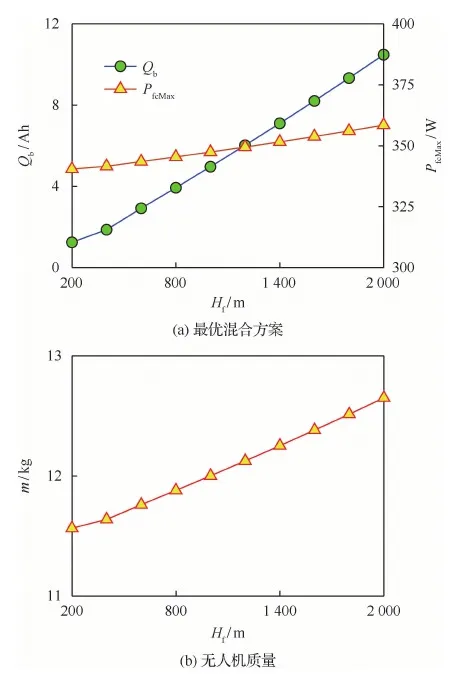
圖14 燃料電池/鋰電池最優混合方案與無人機質量Fig.14 Optimal hybrid scheme of fuel cell/lithium battery and total mass of UAV
圖15為迎角和航跡角隨巡航目標高度的變化。巡航迎角明顯大于爬升迎角,爬升和巡航過程迎角隨目標高度增加變化幅度不大。其中,爬升迎角出現了先減少再增大的轉折點,這是因為巡航目標高度較低時,鋰電池容量較小,限于放電倍率,可用最大功率較小,導致動力不足。當巡航目標高度增加,鋰電池容量增大,可用最大放電功率也增大,為了盡可能減少燃料電池的使用,以降低氫耗,鋰電池爬升過程放電功率將更大,動力系統的可用推力也更大,可以更大航跡角爬升,如圖15(b)所示,直至容量足夠大,使可用的最大放電功率大于動力系統極限功率時,航跡角開始減小,爬升迎角則開始增加。這是因為隨著巡航目標高度的增加,無人機質量持續增大,但動力系統已達到極限,推力卻無法繼續增大,只能降低航跡角以滿足速度方向上的力平衡,并增大迎角以滿足速度法向上的力平衡。
圖16為螺旋槳轉速與需求功率隨巡航目標高度的變化。圖16(a)顯示爬升過程轉速明顯比巡航轉速高;爬升轉速先隨巡航高度增大線性增加,接近極限轉速后保持不變;巡航轉速隨目標高度的變化不明顯。爬升轉速隨目標高度的增加而線性增大的過程是由于鋰電池容量的增大使得可用功率增大,能夠支持動力系統功率以更大功率輸出,以減少爬升時間和燃料消耗。圖16(b)顯示爬升需求功率明顯大于巡航功率,且為巡航需求功率的2.3~3.7倍;由于飛行速度為常量,需求電功率變化趨勢與轉速的變化相同。
圖15 迎角和航跡角隨目標高度的變化Fig.15 Variation of angle of attack and flight-path angle with target altitude
圖17給出了爬升時間和爬升氫氣消耗量占總氫氣消耗量的比。其中,圖17(a)顯示爬升耗時隨巡航目標高度的增大,先大幅減小后緩慢增大,與爬升航跡角的變化趨勢剛好相反,但原因相同,都是因為鋰電池容量和功率的增加,以及無人機質量的增大導致。圖17(b)展示了爬升氫耗比隨巡航目標高度的變化情況,其變化趨勢與爬升時間的變化趨勢相同,這是因為燃料電池的放電比始終為1,爬升氫耗比僅與爬升時間相關。燃料電池輸出功率隨巡航目標高度的變化較小,從而氫耗率變化也較小,而巡航時間一定,從數值比例角度分析,爬升高度越小爬升時間越長,爬升氫耗占比越大。本例最大值僅為3%,因此燃鋰混合的氫耗量優化,不僅要考慮爬升的大功率約束,更要考慮巡航過程的長航時問題。
圖16 轉速和需求功率隨目標高度的變化Fig.16 Variation of rotation speed and demand power with target altitude
圖17 爬升時間與爬升氫氣消耗占比隨目標高度的變化Fig.17 Variation of climb time and ratio of consumed H2 in climb process with target altitude
圖18對比了表6中Hybrid EOS600方案和Optimal hybrid方案的燃料電池放電比隨巡航目標高度的變化。采用EOS600燃料電池,目標高度為200 m時,燃料電池的放電比在爬升和巡航過程分別為0.8和0.6,燃料電池功率水平在兩個階段均有冗余,隨著目標高度增加,爬升過程放電比增大到1,而巡航過程始終為0.6。對于優化后的混合能源系統,燃料電池的放電比在爬升和巡航過程均為1,即均以最大功率輸出,不存在功率冗余,充分發揮燃料電池的作用,進而降低了燃料電池的質量,避免了系統冗余導致的氫氣消耗。
圖18 兩種典型能源混合方案下的燃料電池放電比Fig.18 Discharge ratio of fuel cell for two typical hybrid power schemes
5 結 論
本文針對燃料電池/鋰電池混合動力無人機,以動力系統模型為耦合點,綜合能源狀態與飛行運動狀態模型,開展了能源管理與航跡規劃耦合研究,以及燃料電池與鋰電池混合量優化研究,得到以下結論:
1) 采用能源管理和航跡規劃耦合最優控制策略,在進行能源管理的同時可兼顧飛行狀態控制,給出滿足能源系統約束的最優功率流分配的同時,也給出了滿足飛行狀態約束的最優飛行狀態控制。
2) 爬升目標高度適中或較低時,相比在線模糊控制策略,能源管理與航跡規劃耦合的最優控制策略明顯更節省燃料。而爬升目標高度較高時,兩種策略下鋰電池放電深度相似,燃料電池均工作在高功率狀態,采用耦合最優控制策略對燃料消耗的優化空間不大。
3) 燃料電池/鋰電池最優混合問題研究結果表明針對典型長航時任務剖面,通過燃鋰混合和飛行狀態的綜合優化,可有效地處理短時大功率爬升和長時小功率巡航問題,獲得最優飛行狀態的同時,降低整個任務過程的燃料消耗。
4) 燃料電池/鋰電池混合量經過優化后,燃料電池放電比在爬升和巡航過程中始終為1,即始終以最大功率放電,避免了為滿足爬升功率而選擇更大功率的燃料電池時所產生的功率和質量冗余,從而使氫耗量更低。
5) 針對典型短時大功率爬升、長時小功率巡航的任務剖面,巡航目標高度對最優燃鋰混合中鋰電池容量的影響相對較大,而對燃料電池功率的影響相對較小。受限于動力裝置功率,巡航目標高度增大到一定程度需求功率將保持不變,飛行狀態則會發生一定的變化。爬升時間和爬升氫耗量占比隨目標高度先大幅降低,再小幅增加,本例中爬升氫耗占比最大僅為3%,可見絕大部分氫燃料是在長航時巡航段被消耗,因此,燃料電池無人機氫耗量的優化必須綜合考慮大功率爬升和長航時巡航過程。