氣動機(jī)械手臂的關(guān)鍵技術(shù)特點及控制方式研究
2019-08-16 04:24:22齊愛霞
農(nóng)機(jī)使用與維修 2019年7期
齊愛霞
摘要:機(jī)械自動化是各行各業(yè)發(fā)展的主要趨勢,隨著社會對工業(yè)生產(chǎn)效率的要求越來越高,傳統(tǒng)的人力勞動和半自動化勞動已經(jīng)不能滿足現(xiàn)代生產(chǎn)加工的需要,通過自動機(jī)械手臂代替人工完成重復(fù)的體力勞動,不僅減輕了人工負(fù)擔(dān),更提高了工作效率和質(zhì)量。針對機(jī)械手臂應(yīng)用的特點,說明了其常見的種類和各自優(yōu)勢,分析了氣動機(jī)械手臂的關(guān)鍵技術(shù)原理,總結(jié)了氣動手臂控制的流程及方式。
關(guān)鍵詞:氣動;機(jī)械手臂;技術(shù);控制
Abstract: The main trend of the development of mechanical automation in all walks of life is that with the increasing demand for industrial production efficiency in society, the traditional manual and semi-automatic labor can no longer meet the needs of modern production and processing. Replacing manual labor with automatic manipulator arm not only reduces the manual burden, but also improves the efficiency and quality of work. According to the characteristics of the application of the manipulator, the common types and their respective advantages are explained. The key technology principle of the start-up manipulator is analyzed, and the control principle and mode of the start-up pneumatic manipulator are summarized.
Key words: pneumatic; mechanical arm; technology; control在機(jī)械技術(shù)不斷進(jìn)步的背景下,工業(yè)生產(chǎn)對自動化的要求越來越高,機(jī)械手臂作為現(xiàn)代工業(yè)上廣泛使用的先進(jìn)設(shè)備,在自動生產(chǎn)線、機(jī)械加工、汽車裝配、智能裝備、建筑領(lǐng)域、采礦業(yè)等眾多領(lǐng)域有廣泛的應(yīng)用。常用的機(jī)械手臂主要用來實現(xiàn)抓取和移動工件的相關(guān)功能,機(jī)械手臂盡管在大多數(shù)工作場合均執(zhí)行簡單的重復(fù)性工作任務(wù),但其在保證工作穩(wěn)定性的同時,還能代替人力工作于高溫、噪音、粉塵、有毒、輻射、危險等惡劣環(huán)境,顯著提高了工業(yè)生產(chǎn)的安全性和效率。且傳統(tǒng)的人工搬運設(shè)備存在著生產(chǎn)效率低、準(zhǔn)確性和安全性不足的問題,這也推動了現(xiàn)代化新型機(jī)械手臂的研究與發(fā)展,作為智能輔助設(shè)備,機(jī)械手臂也以其特有的優(yōu)勢創(chuàng)造了非常廣闊的應(yīng)用和發(fā)展前景。
1機(jī)械手臂的種類及特性
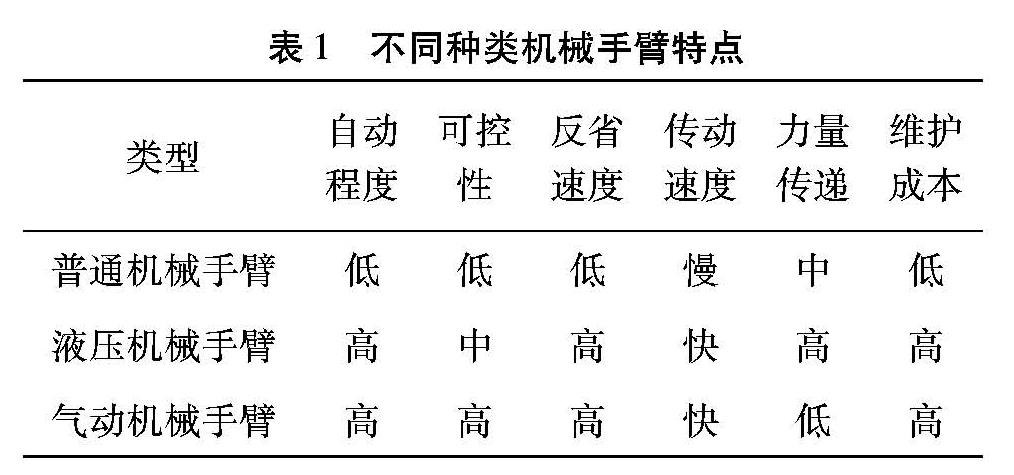
機(jī)械手臂根據(jù)不同生產(chǎn)要求和技術(shù)特點分為不同的種類,按照現(xiàn)階段使用的結(jié)構(gòu)和功能,大體可以分為普通機(jī)械手臂、液壓機(jī)械手臂、氣動機(jī)械手臂以及其他功能更為綜合的先進(jìn)機(jī)械手臂。普通機(jī)械手臂通常采用機(jī)械結(jié)構(gòu)和電機(jī)、關(guān)節(jié)軸承等部件組成,屬于傳統(tǒng)的機(jī)械手臂形式,在過去的機(jī)械化生產(chǎn)中使用廣泛;液壓機(jī)械手臂在普通機(jī)械手臂的基礎(chǔ)上增加了液壓系統(tǒng)及相關(guān)原件,優(yōu)化了機(jī)械手臂的相關(guān)性能;氣動機(jī)械手臂也是在傳統(tǒng)的機(jī)械臂上進(jìn)行的優(yōu)化,增加了氣泵、氣缸及其他氣動元件。
列舉了工業(yè)生產(chǎn)上常用的不同種類機(jī)械手臂的特點。從表中可以看出,普通機(jī)械手臂的優(yōu)勢已不明顯,液壓機(jī)械手臂和氣動機(jī)械手臂根據(jù)不同的使用要求,具備各自的優(yōu)勢和特點,液壓機(jī)械手臂具有傳遞功率大的特點,而氣動手臂的可控性和靈活性更好。
2.1總體結(jié)構(gòu)及特點
采用氣壓回路控制的機(jī)械化手臂在自動生產(chǎn)領(lǐng)域應(yīng)用十分廣泛,根據(jù)不同的要求,機(jī)械手臂的結(jié)構(gòu)和形式也多種多樣,其關(guān)鍵的部件包括了控制裝置、驅(qū)動電機(jī)、氣泵、氣缸、支臂、連接臂、抓手以及固定結(jié)構(gòu)等。
1. 固定底座 2.立柱 3.驅(qū)動電機(jī) 4.氣缸 5.支臂
6.連接臂 7.抓手
2.2關(guān)鍵部件及功能特點
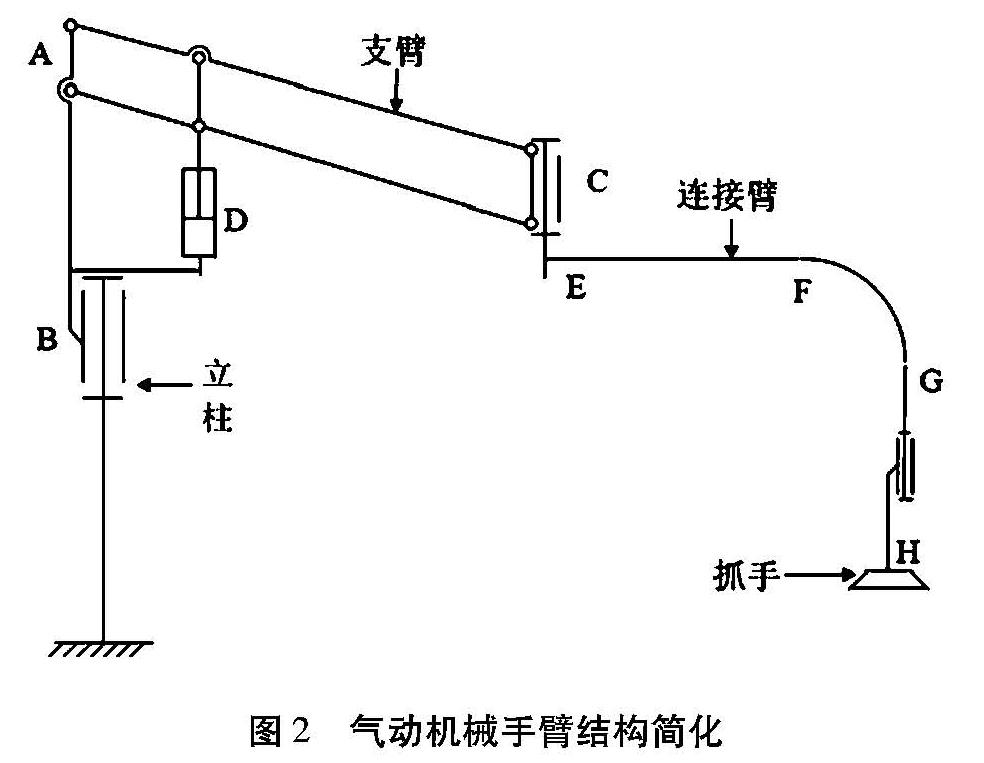
為方便對關(guān)鍵部件進(jìn)行說明,現(xiàn)將圖1中的氣動機(jī)械手臂簡化為圖2所示。立柱的主要功能是實現(xiàn)機(jī)械臂整體在B處的上下移動,同時能夠為支臂在A點提供支點,以保證支臂的上下擺動,從而完成機(jī)械臂的后續(xù)工作。總體上講,立柱必須具備足夠的力學(xué)強(qiáng)度,以保證整個機(jī)械手臂工作過程的安全性。支臂在A點通過轉(zhuǎn)動副與立柱連接,能夠?qū)崿F(xiàn)支臂在豎直方向的擺動要求;連接臂與支臂在C點通過旋轉(zhuǎn)缸連接,以實現(xiàn)連接臂在水平方向的轉(zhuǎn)動要求。連接臂與抓手在G點處采用氣缸直連,能夠?qū)崿F(xiàn)抓手在豎直方向的精細(xì)移動。在設(shè)計各部件結(jié)構(gòu)和尺寸時,必須要考慮實際工作的各種情況,保證機(jī)械手臂能到達(dá)工作面的任意位置。
氣動機(jī)械手臂結(jié)構(gòu)簡化? ? 從圖1可以看出,立柱的結(jié)構(gòu)包括了上下兩個法蘭的連接結(jié)構(gòu),下部法蘭的幾何尺寸較大,能夠與地面基礎(chǔ)通過地腳螺栓實現(xiàn)有效的連接。而與上部結(jié)構(gòu)的連接使用了圓錐滾子軸承作支撐,保證了立柱上半部分能夠繞立柱中心線自由轉(zhuǎn)動,并且在關(guān)節(jié)處設(shè)計有制動結(jié)構(gòu),若發(fā)現(xiàn)機(jī)械臂出現(xiàn)故障問題或危險,可通過控制制動器實現(xiàn)旋轉(zhuǎn)結(jié)構(gòu)的鎖定。立柱的上部通過心軸與支臂相連接,支臂利用汽缸伸縮實現(xiàn)相關(guān)動作,在支臂與立柱的連接處,也設(shè)計了安全防護(hù)的制動裝置,以避免支臂失效突然下垂而產(chǎn)生的安全隱患。
3氣動控制原理及工作流程
氣壓傳動的機(jī)械手臂是工業(yè)上應(yīng)用較多,通過將空氣壓縮后產(chǎn)生的能量轉(zhuǎn)換為動能,從而完成氣缸等執(zhí)行元件的運動,帶動機(jī)械臂各部件完成相關(guān)動作。機(jī)械臂使用的啟動裝置大體由動力機(jī)構(gòu)、輔助機(jī)構(gòu)、控制機(jī)構(gòu)和執(zhí)行機(jī)構(gòu)組成,如圖3所示。動力機(jī)構(gòu)主要是用氣泵壓縮空氣為系統(tǒng)提供壓縮力的結(jié)構(gòu),輔助機(jī)構(gòu)主要是對氣源進(jìn)行過濾、傳導(dǎo)等輔助功能,控制結(jié)構(gòu)通過控制閥改變壓縮空氣的壓力、流動方向以及流量,執(zhí)行元件通過氣缸、旋轉(zhuǎn)缸完成指定動作。
4結(jié)束語
綜上所述,氣動機(jī)械手臂在結(jié)構(gòu)和功能執(zhí)行上具備其特有的優(yōu)勢,較適合需要靈活反應(yīng)和便捷操作的場合使用。由于不同工作場合對氣動機(jī)械手臂的要求不相同,因此,在設(shè)計和使用氣動手臂時應(yīng)注意對其氣源和傳導(dǎo)零件的保護(hù),以避免漏氣或裝置失效產(chǎn)生安全隱患。盡管氣動機(jī)械手臂具有效高的使用價值,但是隨著工業(yè)自動化技術(shù)的不斷進(jìn)步,為克服機(jī)械手臂作業(yè)的短板,先進(jìn)機(jī)械手臂的研究逐漸向著多功能和多學(xué)科結(jié)合的方向進(jìn)步。
參考文獻(xiàn):
[1]葉金玲, 周欽河, 賴乙宗. 自動化生產(chǎn)線機(jī)械手全氣動控制系統(tǒng)設(shè)計[J]. 制造技術(shù)與機(jī)床, 2014(4):79-82.
[2]楊波, 沈燕青, 朱林軍. 氣動機(jī)械手在自動化沖壓生產(chǎn)線設(shè)計中的應(yīng)用[J]. 科學(xué)與財富, 2017(1).
[3]師亞娟, 劉欣. 基于PLC的自動化生產(chǎn)線三自由度機(jī)械手控制系統(tǒng)設(shè)計[J]. 工業(yè)控制計算機(jī), 2013, 26(6).
[4]李鵬帥. 氣動助力機(jī)械臂結(jié)構(gòu)設(shè)計與控制系統(tǒng)研究[D].天津:天津大學(xué),2015.
[5]應(yīng)帥. 基于PLC的機(jī)械手臂控制系統(tǒng)設(shè)計的研究[J]. 科技創(chuàng)新導(dǎo)報, 2017(36).(03)
猜你喜歡
中國科技博覽(2016年18期)2016-10-19 09:33:57
中國科技博覽(2016年18期)2016-10-19 09:04:19
中國科技博覽(2016年18期)2016-10-19 08:55:40
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 20:00:58
科技視界(2016年21期)2016-10-17 19:38:30
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
商(2016年27期)2016-10-17 04:13:28
大眾理財顧問(2016年9期)2016-10-11 17:10:17
