基于滑模觀測器的永磁同步電機無傳感器控制
2019-08-17 03:04:40趙仙花劉豪睿高興超
時代農機 2019年5期
趙仙花,劉豪睿,高興超
(德州學院 汽車工程學院,山東 德州253023)
1 引言
永磁同步電動機(PermanentMagnetSynchronousMotor,PMSM)具有結構簡單、運行可靠、體積小、質量輕、損耗少、效率和功率密度高等優點,被廣泛用于高性能調速系統中。目前實現高動態性能永磁同步電機控制的兩種主流控制策略是矢量控制和直接轉矩控制,在采用磁場定向的矢量控制時,為了實現高性能的三相PMSM控制系統,一般需要獲得準確的轉子位置和轉速信息,但機械傳感器的安裝使用會增加系統成本、尺寸和重量,并對使用環境有比較嚴格的要求。而無傳感器控制技術則通過檢測電機繞組中的有關電信號,采用一定的控制算法即可實現轉子位置和速度估算,代表了PMSM無傳感器控制系統的發展方向。目前常用的控制算法有滑模觀測器算法、模型參考自適應控制算法、擴展卡爾曼濾波器算法等。其中滑模觀測器的方法由于滑動模態可進行設計,并且與被控制系統參數和外部擾動無關,對內部參數攝動和外部干擾具有較強的魯棒性和較高的控制精度,具有結構簡單,易于實現等優點。因此,滑模控制技術受到各國學者關注而得到了廣泛應用,在電機控制領域應用研究越來越受到重視,是一種發展前景較好的無位置傳感器電機控制方法。
我們采用一種連續函數υ(x)代替符號函數sign(x)設計滑模觀測器的方法與傳統的設計方法相似,僅僅是改變了傳統的切換函數,但與傳統滑模觀測器相比,這種新方法不僅有效抑制了抖振的影響,而且可以省略低通濾波器和相角補償,提高了滑模SMO的控制性能。
2 永磁同步電機數學模型
永磁同步電機在靜止坐標系α—β下的電流方程
其中反電動勢方程:

式中:
iα、iβ—定子電流 α-β軸分量
uα、uβ—定子電壓 α-β 軸分量
eα、eβ—反電動勢 α-β軸分量
Ls、Rs—定子電感和電阻
ψf—永磁體磁鏈
ω—電機電角速度
θ—電機轉子角位置
由式(2)可得電機轉子位置和轉速,其表達式為:

由式(3)和(4)可知,永磁同步電機的轉子位置和轉速與其反電動勢有關,因此可以通過滑模觀測器估算反電動勢信號就能獲得所需的轉子位置和轉速,從而實現電機的無傳感器控制。
3 滑模觀測器的設計
永磁同步電機傳統的滑模電流觀測器在α-β坐標系下的方程:
式中:
uα、uβ—α-β 軸觀測器的控制輸入量
由(5)式減去(1)式得定子電流偏差方程:
式中:
通常滑模控制器的設計分為兩部分:(1)選擇合理的滑模面;(2)設計控制律。使得系統軌跡在控制律的作用下趨近滑模面。
根據電機電流方程和滑模變結構理論,定義滑模面為:

定義滑模切換面為:

滑模控制函數采用連續函數υ(x)代替符號函數sign(x):

其中:δ為很小的正常數。
設計控制律為:
穩定性證明:
對(10)求導得:.

得到滑模存在的條件:

將(12)帶入(9)進一步推到可得滑模存在的條件:
k>max(|eα|,|eβ|) (13)
在一定時間內運動點到達滑模面餅在滑模面上運動時,滑模面上的點滿足條件:

將(14)帶入(6)得:

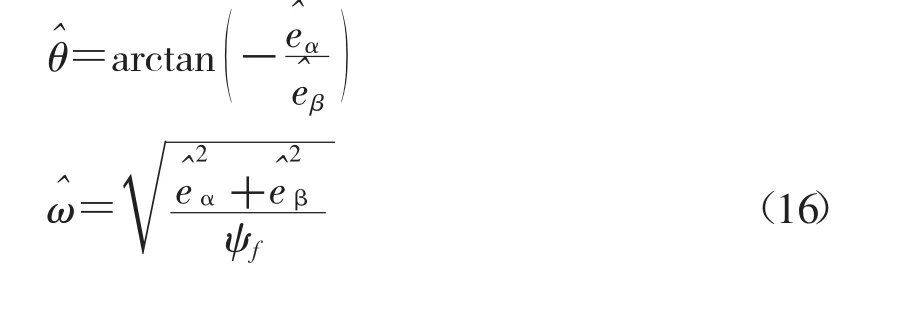
由反電動勢表達式(15)可計算出轉子的位置和速度:
4 仿真實驗與分析
基于SMO的三相PMSM無傳感器控制框圖如圖1所示。
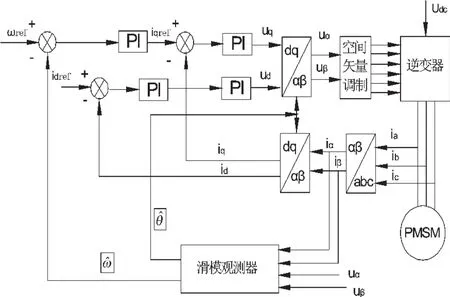
圖1 基于滑模觀測器的永磁同步電機無傳感器矢量控制框圖
為驗證滑模觀測器的可行性和有效性,根據圖1所示的基于SMO的三相PMSM無傳感器控制框圖,在Matlab/Simulink環境下搭建其仿真模型。永磁同步電機無傳感器矢量控制的控制方式采用idref=0的控制策略。仿真時電機模型參數設置如表1所示。
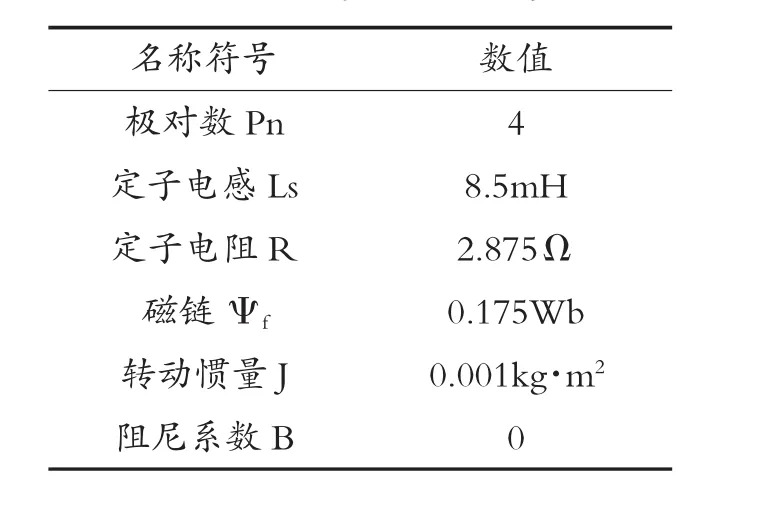
表1 永磁同步電機仿真參數
仿真條件設置為:直流側電壓Uab=311V,PWM開關頻率fpwm=10kHz,仿真時間t=0.15s。由于搭建的模型相對復雜,為了能夠使仿真速度加快,選用定步長ode3(Bogacki-Shampine)算法,且仿真步長設置為 2×10-7s。
電機的初始轉速800r/min,0.04~0.05s突變為1000r/min;空載啟動,在 0.07~0.08s時,Te=10Nm 發生階躍變化。其中圖2轉速估計值與實際值的變化曲線,圖3轉速估計誤差的變化曲線,圖4轉子位置估計值與實際值的變化曲線,圖5轉子位置估計誤差的變化曲線,從圖中可以看出啟動過程平穩,估計值能準確快速跟蹤真實值,觀測精度高。在穩態運轉時,轉速誤差約為0.05r/min,即使是在轉速突變和負載突變時,轉速誤差也大約在0.3r/min左右,而轉子位置最大誤差不超過0.8rad,誤差非常小,跟蹤精度高。驗證了此算法魯棒性好,抗負載干擾能力強,收斂速度快,抖振小,保證了系統具有良好的動靜態特性。
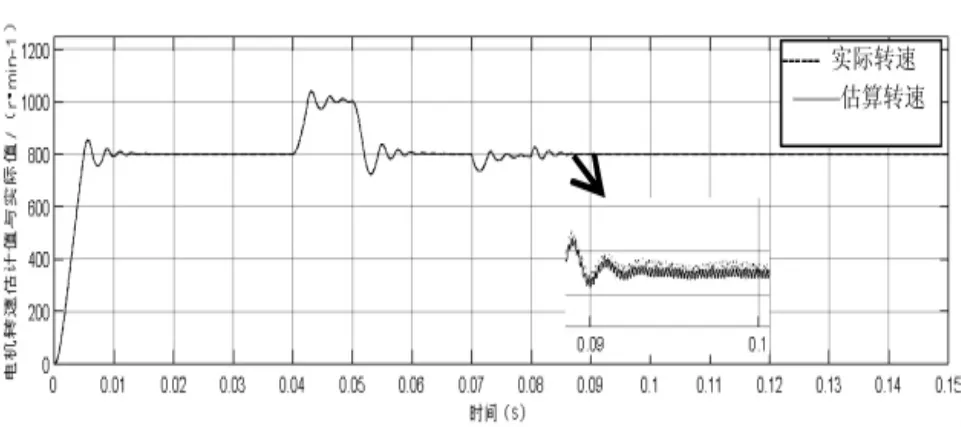
圖2 轉速估計值與實際值的變化曲線
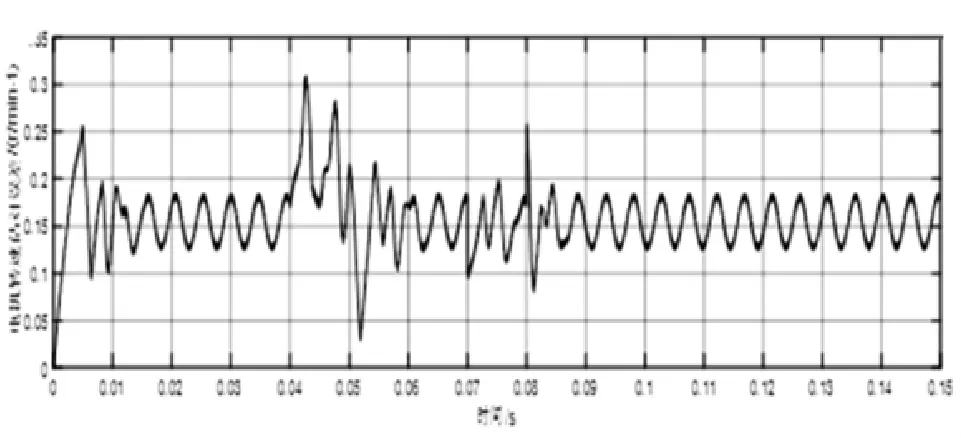
圖3 轉速估計誤差的變化曲線

圖4 轉子位置估計值與實際值的變化

圖5 轉子位置估計誤差的變化曲線
5 結 語
在分析傳統滑模觀測器的基礎上,采用連續函數v(x)代替符號函數sign(x)設計了永磁同步電機無傳感器控制的滑模觀測器并對其進行了穩定性證明。通過仿真實驗表明:此控制器在減少濾波環節和相位補償環節的同時有效抑制了抖振,并能夠實現電機轉子位置和轉速的精確估計,結果表明該滑模觀測器可行有效。