基于振動信號的齒輪泵故障診斷
2019-08-27 07:33:24何慶飛陳小虎王旭平喻春明
噪聲與振動控制 2019年4期
何慶飛,陳小虎,王旭平,喻春明,張 寧
(1.西京學院 機械工程學院,西安 710123; 2.火箭軍工程大學 作戰(zhàn)保障學院,西安 710025)
液壓泵是液壓系統(tǒng)的核心,對其進行狀態(tài)監(jiān)測和故障診斷是確保液壓系統(tǒng)安全和可靠運行的重要舉措。基于振動信號的液壓泵故障診斷是常用的故障診斷方法之一。由于測試環(huán)境溫度的變化會造成儀器的零點漂移,導致原始信號中含有長周期趨勢項[1-2],文獻[3-4] 對振動信號的趨勢項去除方法進行了研究。液壓泵的振源較為復雜,除去自身的機械振動外,還有油液沖擊振動和電動機耦合振動等,因此采集的信號含有噪聲干擾。為有效抑制干擾信號的影響,提高信號光滑度,需要對采集的信號數(shù)據(jù)進行平滑預處理。文獻[5-6] 研究了信號平滑處理方法,經實例驗證有效可行。很多學者對故障特征信號的提取方法進行研究,文獻[7] 研究了基于峭度時域特征提取方法,文獻[8-9] 研究了基于小波包和經驗模態(tài)分解頻域特征提取方法。支持向量機是故障診斷的重要方法之一,文獻[10-11] 研究了支持向量機模式識別算法。
本文以齒輪泵為例,研究不同故障狀態(tài)下各監(jiān)測參數(shù)的變化情況,采集各狀態(tài)下的振動信號,首先對采集信號采用多項式最小二乘法去除采集振動信號的趨勢項,再采用五點三次平滑法對信號進行平滑預處理,然后分別提取基于峭度液壓泵時域特征、小波包能量特征和經驗模態(tài)分解特征,最后采用最小二乘支持向量分類機(Least squares support vector classification,LS-SVC)建立故障診斷與模式識別模型,進行狀態(tài)識別。
1 基于馬氏距離的傳感器通道選擇
對齒輪泵不同工況下的運行狀態(tài)采集了3個通道振動信號,為選取最佳的傳感器通道振動信號進行特征提取與故障診斷,提出了基于馬氏距離的傳感器通道選擇方法。
馬氏距離是Mahalanobis于1936年提出,用來描述數(shù)據(jù)的協(xié)方差距離測度。馬氏距離的大小,可用來表征兩個樣本之間的相似度,兩個樣本的馬氏距離越小,樣本間相似度越大;反之,說明樣本間相似度越小。樣本xi與xj之間的馬氏距離為

其中:V為樣本xi與xj所在總體的協(xié)方差矩陣。
樣本xi與總體G之間的馬氏距離為

其中:μ為總體G的均值,V為總體G的協(xié)方差矩陣。
對于多個總體的判別,分別依據(jù)式(2)計算樣本至各個總體的馬氏距離,并依據(jù)馬氏距離的大小進行判別。在馬氏距離判別方法的基礎上,提出傳感器通道選擇方法。
測試樣本集Y1中的樣本yj類別判別公式為

其中:μi,i=1,2,3分別為總體G11、G12、G13的均值,V為總體G11、G12、G13組成的數(shù)據(jù)集總體協(xié)方差矩陣。
2 振動信號預處理
振動信號預處理是為了在數(shù)據(jù)分析前降低采集的信號數(shù)據(jù)中各種噪聲的污染,提高信噪比,以提高后續(xù)特征提取和故障診斷的精度。文中主要利用趨勢項消除和平滑預處理對采集的齒輪泵振動信號進行預處理。
2.1 趨勢項消除
消除信號趨勢項是信號預處理的一項重要內容,論文采用多項式最小二乘法消除信號的趨勢項。
加速度傳感器采集的振動信號數(shù)據(jù)為{xk}(k=1,2,…,n),采用m階多項式擬合數(shù)據(jù)序列xk,即

依據(jù)最小二乘法原理,確定系數(shù)aj(j=0,,1,…,m),使得xk和x^k之間的誤差平方和最小,即

E有極值的條件為E對ai偏導為零,即

分別對系數(shù)ai(i=0,1,…,m)求偏導,可得m+1個線性方程,可表示為

當m=0時,方程式(7)的解為
趨勢項為常數(shù),消除常數(shù)趨勢項計算公式為

當m=1時,方程式(7)的解為

趨勢項為線性趨勢項,消除線性趨勢項計算公式為

當m≥2時,設定的趨勢項為曲線趨勢項,通常取m=1~3對采樣信號進行多項式趨勢項消除。
2.2 平滑預處理
為有效抑制干擾信號的影響,提高信號光滑度,需要對采集的信號數(shù)據(jù)進行平滑預處理。文中采用五點三次平滑法對采集的信號進行平滑預處理。
五點三次平滑法是基于最小二乘法原理對離散信號數(shù)據(jù)序列進行三次最小二乘多項式平滑的方法,計算公式為

式中:i=3,4,…,m-2。
3 故障診斷和模式識別
論文采用LS-SVC建立故障診斷與模式識別模型。LS-SVC是在SVM基礎上的一種改進學習方法,運用二次損失函數(shù),將SVM中的二次規(guī)劃問題轉化為對線性方程組的求解,在保證精度的同時降低了算法的計算復雜度,在故障診斷、模式識別等鄰域得到了廣泛的應用。LS-SVC的原始問題是凸二次規(guī)劃,即

引進記號

二次規(guī)劃的對偶問題為

求解式(14)所示的最優(yōu)化問題,求得決策函數(shù)

其中:g(x)表達式為


圖1 液壓齒輪泵故障診斷流程圖
在應用LS-SVC方法對提取的振動信號故障特征進行訓練和模式分類時,選用高斯徑向基函數(shù)作為核函數(shù)。由于液壓齒輪泵的故障模式有多種,因此需要構建多個兩類分類機解決多類分類問題;按照介紹的成對分類方法,構建多類分類機,并依據(jù)成對分類樣本類別判定規(guī)則對測試樣本進行類別判別;對于用判定規(guī)則無法判定的樣本即拒識域內的樣本,采用基于Fisher判別分析的拒識域識別方法進行判別,通過對拒識域內樣本的識別,提高算法的泛化性和魯棒性。液壓齒輪泵故障診斷流程如圖1所示。
4 實驗驗證
在實驗室針對CB-KP63齒輪泵進行試驗,所采用的傳感器是PCB公司的608A11型ICP加速度傳感器,采集卡為UA302H型16位A/D,采樣頻率為20 kHz,采集軟件為實驗室自主研發(fā)的液壓泵在線狀態(tài)監(jiān)測與故障診斷系統(tǒng),試驗是在油液溫度為25℃~45℃之間和工作壓力為5 MPa條件下進行。在齒輪泵的垂直徑向(1#測點)、水平徑向(2#測點)和軸向(3#測點)安裝了3個加速度傳感器測量泵殼振動情況,其中2#測點靠近泵的出油口,3#測點位于齒輪泵端面靠近被動軸軸承,傳感器測點布置如圖2所示。

圖2 振動傳感器測點布置圖
在實驗中設置了氣穴故障、齒輪磨損、側板磨損、軸承故障4類故障,其中,采樣頻率為20 kHz,每組樣本的采樣點數(shù)為4096。
4.1 傳感器通道選擇
采集各通道振動信號各40組,計算各組振動信號的時頻域參數(shù),并定義不同通道的傳感器振動信號狀態(tài)參數(shù)集為X1、X2和X3。對于傳感器通道1,從狀態(tài)參數(shù)集X1中隨機選取不同狀態(tài)各20個數(shù)據(jù)樣本分別組成總體G11、G12、G13,剩余不同狀態(tài)各20個,共60個數(shù)據(jù)樣本組成測試樣本集Y1。
對于傳感器通道2和傳感器通道3,均采用上述方法對測試樣本集Y2和Y3中樣本進行判別。判別結果如表1所示。
由表1可知,基于馬氏距離的類別判別方法對傳感器通道1的振動數(shù)據(jù)誤判率最小,對傳感器通道2和傳感器通道3的誤判率較高。
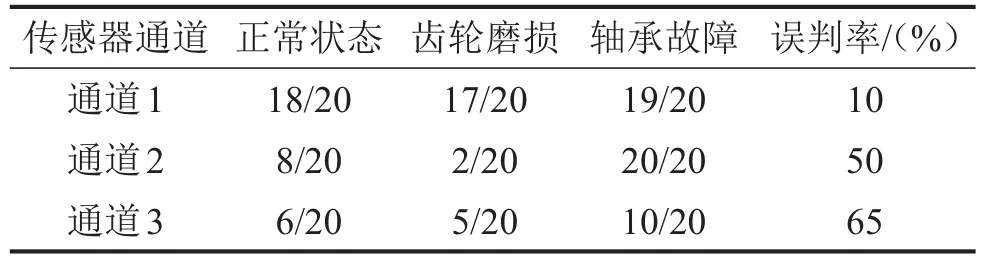
表1 測試樣本類別判別結果
通過分析齒輪泵的振動源可知,齒輪泵的機械彈性振動和主、從齒輪嚙合過程中產生的振動主要集中在齒輪泵的徑向方向,齒輪泵垂直方向的傳感器通道1采集的振動信號強度大,信號質量高;而齒輪泵水平方向的傳感器通道2由于受到油壓振動噪聲的污染,信號振動源比較復雜,信號污染嚴重;齒輪泵軸向方向的傳感器通道3由于安裝位置離振動源較遠,信號相對較弱,特征信息微弱;經綜合分析比較,選擇傳感器通道1采集的振動信號作為研究對象進行進一步特征提取和故障診斷與模式識別。
4.2 趨勢項消除
以消除傳感器通道1采集的齒輪泵正常狀態(tài)振動信號趨勢項為例,階數(shù)m選為3,振動信號樣本趨勢項消除效果如圖3所示。
圖3的對比結果顯示,振動信號去除趨勢項前后的信號序列和對應的頻譜圖未發(fā)生明顯的變化,說明齒輪泵正常狀態(tài)下振動信號中的趨勢項干擾較弱,需對所有采集的振動信號進行趨勢項預處理以避免趨勢項干擾對信號質量產生影響。
4.3 平滑處理
齒輪泵正常狀態(tài)下振動信號樣本的平滑預處理效果如圖4所示。
圖4(a)和圖4(b)的對比顯示,經五點三次平滑法處理后的信號序列的幅值和對應的頻譜圖發(fā)生明顯變化,平滑處理后的信號噪聲成分被削弱,曲線毛刺明顯減少,提高了信號曲線光滑度。

圖3 振動信號趨勢項消除效果

圖4 振動信號平滑預處理效果
4.4 故障診斷
在正常狀態(tài)和4種故障模式下分別測取150組測量信號,隨機選取不同狀態(tài)的振動信號樣本各100組作為已知狀態(tài)的訓練數(shù)據(jù),剩余各50組作為未知狀態(tài)的測試數(shù)據(jù)。
為驗證論文提出的故障診斷方法的有效性,在對采集的振動信號預處理后分別運用基于峭度液壓泵時域特征提取、小波包能量和經驗模態(tài)分解特征提取方法提取特征,將提取的訓練數(shù)據(jù)故障特征參數(shù)作為LS-SVC的訓練樣本對核函數(shù)參數(shù)進行優(yōu)化選取和最佳分劃超平面的構建,測試數(shù)據(jù)故障特征參數(shù)作為LS-SVC的測試樣本,驗證不同方法的模式識別精度。按照成對分類多類別分類機構造方法,構造10個最小二乘支持向量分類機,并對測試樣本進行模式識別,分類結果如表2所示。從表中結果可得,基于EMD的振動信號狀態(tài)參數(shù)提取方法效果更好,由于振源復雜性和噪聲干擾的存在,導致提取的振動信號中夾雜復雜的背景噪聲,直接從振動信號中提取狀態(tài)參數(shù)將導致故障征兆湮沒在復雜背景噪聲中;經驗模態(tài)分解的IMF分量攜帶了從低頻到高頻的局部特征信息,在此基礎上提取的狀態(tài)參數(shù)凸顯原信號的局部特征信息,提高了狀態(tài)參數(shù)集故障特征信息的蘊含量。

表2 基于LS-SVC多類分類器的液壓齒輪泵分類結果
5 結語
(1)對齒輪泵不同工況采集3個通道振動信號,采用基于馬氏距離的類別判別方法處理傳感器通道1的振動數(shù)據(jù)誤判率最小。因此,選擇傳感器通道1采集的振動信號作為研究對象。
(2)為提高齒輪泵特征提取和故障診斷的精度,先利用多項式最小二乘法消除采集振動信號的趨勢項,再采用五點三次平滑法對采集的信號進行平滑預處理,有效抑制干擾信號的影響,提高信號光滑度。
(3)基于LS-SVC多類分類器的液壓齒輪泵模式識別結果表明,基于EMD的振動信號狀態(tài)參數(shù)提取方法效果更好。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
第一財經(2021年6期)2021-06-10 13:19:08
天天愛科學(2020年6期)2020-09-10 07:22:44
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
Coco薇(2017年9期)2017-09-07 21:23:49
紡織服裝流行趨勢展望(2016年2期)2016-05-04 03:47:15
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車科技(2015年1期)2015-02-28 12:14:44
計算物理(2014年2期)2014-03-11 17:01:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
