“秋千式”月面下降/上升單級可重用運輸系統概念設計
2019-08-29 01:50:40何湘粵李海陽楊路易黃海兵
載人航天 2019年4期
何湘粵,李海陽*,楊路易,黃海兵
(1.國防科技大學空天科學學院,長沙410073;2.長沙翔宇信息科技有限公司,長沙410205)
1 引言
月球作為距離地球最近的天體,是人類開展太空探測和資源利用的首選目標[1-2]。20世紀以來,美國和蘇聯開展了大量月球探測活動。美國先后發射了“先鋒”、“艾布爾”、“徘徊者”、“勘測者”、“月球軌道器”、“探險者”、“阿波羅”7 個系列以及“克萊門汀”、“月球勘探者”共56個月球探測器,成功率為66%;蘇聯發射了“月球號”、“探測號”、“宇宙號”、“聯盟號”等系列共64個月球探測器,成功率為32.8%[2-4]。進入21世紀后,世界各航天大國實施了多項月球探測活動,月球再次成為太空探測的熱點[4]。
到目前為止,唯一成功的載人登月任務是美國的阿波羅計劃[5]。阿波羅工程開始于1961年5月,于1969年7月Apollo 11號首次實現載人登月;到1972年12月,共發射了7艘登月飛船,除Apollo 13號外,其余6次均獲得成功[6-9]。Apollo 11號飛船總重45 130 kg,由指令艙、服務艙和登月艙3部分組成,通過土星5號運載火箭1次發射進入奔月軌道[1]。
我國于2004年啟動了“嫦娥”工程。工程以無人探測為主,規劃分三期實施,分別實現繞月探測、月面軟著陸與月面巡視勘察、月面巡視勘察與自動采樣返回地球,簡稱為“繞”、“落”、“回”3步走,目前已經完成繞月飛行探測以及著陸器月面巡視勘察等任務[10-11]。探月返回方面,探月三期月地高速再入返回飛行器是我國首個探月返回飛行器,也是我國首次采用跳躍式再入方式返回地面的飛行器,其成功為之后的月球自動采樣返回任務奠定了堅實的基礎[12]。
按照嫦娥工程規劃,下階段將要完成采樣返回。進一步需要完成載人登月,建立月球科學試驗基地等工程任務,屆時將需要開展大批量的人員月地往返運輸任務,對于載人月面著陸與上升飛行器的需求十分迫切。目前我國正在進行載人登月和載人深空探測工程論證,現有飛行器難以滿足載人月面著陸與上升的任務需求[13-14]。
針對月地往返大速度增量需求的情況,Hoyt等[15]提出一種搭建地月繩系衛星運輸系統的創意設計方案,由近地軌道和環月圓形低軌道上的兩個旋轉繩系衛星組成,僅需要很少的速度增量即可實現地月間有效載荷的往返傳輸。使用該運輸系統完成月面下降/上升時,繩系衛星上配重的移動使繩的近月端與月面距離減小至1 km左右,且相對月面的速度幾乎為零。但該系統需要在向月面釋放一定載荷的同時,在月球表面捕獲相同質量的載荷,以保證整個任務過程中系統的軌道能量和動量守恒。因此,該系統僅適用于月地之間的貨物傳輸,不能直接用于載人登月任務。
本文針對未來載人登月任務需要,在充分繼承現有載人月面著陸與上升飛行器的研究基礎上,基于繩系結構姿軌運動強耦合特性,提出一種在環月軌道位置部署的高速旋轉的繩系空間站——“秋千式”月面下降/上升單級可重用運輸系統的概念,以期降低月球探測成本。
2 方案概述
2.1 運輸系統組成與功能
“秋千式”月面下降/上升單級可重用運輸系統由“秋千式”旋轉平臺(簡稱旋轉平臺)、月面單級往返運輸飛行器(簡稱登月艙)和地月往返飛行器(奔月時簡稱飛船,返回時簡稱返回艙)構成。運輸系統組成如圖1所示。

圖1 運輸系統組成Fig.1 Composition of the transportation system
旋轉平臺用作月球探測的動量存儲/釋放媒介,旨在降低環月制動、月面下降、月面上升、月地返回的沖量需求。該平臺由輪站核心與輪站配艙在軌組裝而成,平臺兩端設置有“魔方式”吊裝機構以及勾環式對接機構,在載人月球探測前,在吊裝機構上預先部署月面單級往返運輸飛行器及生活艙等設施,對應的兩端吊裝機構總質量均為28 t。旋轉平臺運行在環月軌道上,暫定300 km高的圓軌道附近,平臺兩端通過長達300 km的輕質高強度吊繩連接大型吊裝機構,吊裝機構繞平臺質心以1250 m/s左右的相對速度與軌道同向旋轉,對應的平臺自轉角速度為8.33×10-3rad/s,能提供1g左右的人工重力環境。吊繩的用材為碳納米管,密度為 1300 kg/m3,抗拉強度為130 GPa[16]。考慮吊繩的質量為8 t,相應的橫截面積為2.05×10-5m2,直徑約為2.88 mm。
單級往返飛行器用于完成載人月面下降與上升。該飛行器重8 t,帶有約3.5 t推進劑,可提供1600 m/s的總速度增量;采用單艙低底盤設計,可實現3人左右的月面往返運輸任務;具有月面亞軌道飛行能力,可與相對月面150 km高、相對速度幾百米每秒左右的旋轉平臺吊裝機構快速交會對接,并可適應較大范圍的位置和速度偏差。
地月往返飛行器用于完成人員地月轉移。由于旋轉平臺遠月端速度達到了月球的逃逸速度,該飛行器只設計了兩個艙段:返回艙和推進艙。推進艙重6 t,為一次性艙段,主要功能為燃料運輸,并具有一定的變軌和對返回艙的輔助支持能力;返回艙重6 t,可用于3~4人的地月人員運輸,并可重復使用。探測任務完成后,返回艙在合適的相位被甩回地球,推進艙留置于吊裝機構部分,為月面單級往返運輸飛行器和旋轉平臺補給燃料,也可作為平臺配重或者月球撞擊實驗部件。
2.2 任務過程整體描述
運用“秋千式”月面下降/上升單級可重用運輸系統進行載人月球探測時,任務可以分為兩大類:旋轉平臺建造任務和載人月球探測任務。其中,旋轉平臺建造任務是載人月球探測的準備階段,發射的都是無人飛行器,任務時間較為靈活,搭建后可以長期使用,只需要單向運輸;載人月球探測任務則是環月空間站搭建好后的具體載人應用,需要在任務時間、安全性方面更加注重,每次探測任務需要一次新的發射,并需要從月球返回。
2.2.1 旋轉平臺建造任務
旋轉平臺的建造過程共包括4次發射任務:第1、2次發射主要用于搭建旋轉平臺的主體結構;第3次發射將月面單級往返運輸飛行器裝配至旋轉平臺;第4次發射為可選情況,與第3次發射相同,用于任務的冗余備份和月面救援任務。旋轉平臺建造過程如圖2所示。
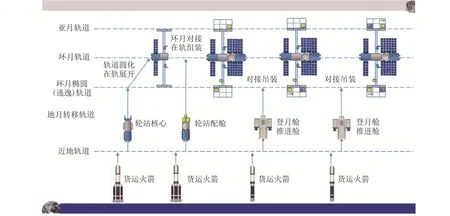
圖2 旋轉平臺建造過程Fig.2 Construction process of the swing platform
第1次發射:通過運載火箭將旋轉平臺的輪站核心部分運送至地月轉移軌道,到達距離月面300 km高度附近時,輪站核心進行制動,并進行軌道圓化調整,使整體沿300 km高的環月軌道作圓周運動。隨后,輪站核心中的繩艙開始釋放一定長度的吊繩(下文簡稱“繩”),兩端連接的機構在繩所在平面內向相反的方向噴氣,使整體開始進行自旋。
第2次發射:通過運載火箭將旋轉平臺的輪站配艙部分運送至地月轉移軌道,到達輪站核心遠月端所在位置的附近時,輪站配艙進行制動,并與輪站核心完成交會對接。隨后,輪站配艙將能源艙與服務艙進行分配,安排至繩的兩端。待結構組裝完成后,開始逐漸釋放繩,并通過與第1次發射相同的噴氣方式保持整體的自旋角速度,直至繩完全釋放至300 km。至此,旋轉平臺主體結構搭建完成。可認為前兩次任務發射質量相等,均為24 t。
第3次發射:通過運載火箭將8 t的登月艙運送至地月轉移軌道,到達旋轉平臺遠月端所在位置的同時,平臺對接機構轉動到遠月端。通過勾環式對接方法,平臺勾住登月艙伸出的掛環,將登月艙拉至魔方式吊裝結構中,并通過旋轉重組實現對艙體布局的合理安排。
第4次發射:同第3次發射,最終在平臺的兩端對稱布置兩個登月艙。至此,可重用登月艙已經裝配至旋轉平臺中。
在長期月面探測任務中,登月艙設計為可重用,當其到達設計壽命時,需要重復第3次發射任務,替換對應的飛行器。在裝配完成后,旋轉平臺需要進行軌道維持和修正,因為環月飛行時間較長,可以采用高比沖的電推進系統進行這項工作,成本將遠低于常規變軌,不會對方案造成大的技術問題。
2.2.2 載人月球探測任務
每次載人月球探測需要進行1次載人地月往返飛行器發射,整個探測任務如圖3所示。探測任務從地月轉移開始可以分為以下階段:

圖3 載人月球探測任務過程Fig.3 Manned lunar mission scenario
地月轉移階段:通過運載火箭將載人地月往返飛行器(包括返回艙與推進艙)運送至地月轉移軌道,待旋轉平臺對接機構轉至遠月端時,來自地月轉移軌道的載人地月往返飛行器同時到達軌道近地點附近位置,兩者完成交會對接。通過地月轉移軌道的初始瞄準和中途修正,原理上可使得兩飛行器在對接點相對速度自然為零,設計中考慮偏差引入了一定的軌道修正余量。
探測前環月飛行段:旋轉平臺魔方式吊裝機構對推進艙、返回艙進行分解吊裝和旋轉重組,返回艙與環月密封艙段對接,推進艙用于為平臺和月面單級往返運輸飛行器補給燃料。在月球探測前,航天員需要轉移到登月艙中,并與其它密封艙段分離,由懸吊系統吊裝到待釋放位置。
月面下降階段:當平臺質心運行到著陸點附近,吊裝機構旋轉到近月端位置時,釋放月面單級往返運輸飛行器。登月艙沿亞軌道拋落月面,通過制動減速完成月球著陸。
月面探測階段:航天員出登月艙進行短期的月面活動,活動之后返回登月艙。
月面上升階段:當平臺質心運行到著陸點附近,吊裝機構旋轉到特定相位時,登月艙點火進入亞軌道,并在最高點附近與吊裝機構交會。通過勾環式對接機構,實現與平臺的連接。
探測后環月飛行段:旋轉平臺吊裝機構對登月艙吊裝,登月艙與環月密封艙段對接。在返回前,航天員需要轉移到返回艙中,并與其它密封艙段分離,由懸吊系統吊裝到待釋放位置。
月地返回階段:當平臺質心運行到返回分離點附近,吊裝機構旋轉到遠月端附近時,釋放返回艙。返回艙沿月地轉移軌道返回地球,通過中途修正和跳躍式再入控制,降落地球特定著陸區域。
探測任務完成后,推進艙留置于吊裝機構部分,繼續為登月艙和旋轉平臺補給燃料,也可作為平臺配重或和月球撞擊實驗部件。
由于登月過程中的燃料損耗,單次載人登月過程中的上下行動量不會完美抵消,一個周期后會對環月空間站附加一定的擾動,平臺質心所在軌道也會發生一定程度的偏離。因此在下個探測周期到來之前,平臺需要進行軌道維持和修正,使得平臺質心所在軌道恢復到初始狀態。但修正的時間可以安排較為寬松,通過電推進等先進推進方案,可以將運營成本進一步降低。
3 方案設計
3.1 動量儲存與釋放
旋轉平臺在繞自身質心進行勻速自轉的同時,還沿環月軌道作圓周運動,且轉動的角速度方向一致。記該旋轉平臺遠月端到質心的距離為l1,近月端到質心的距離為l2,自轉角速度為ω,質心環月速度大小為v,具體運行如圖4所示。

圖4 旋轉平臺動量存儲/釋放機理Fig.4 Momentum storage/release of the swing platform
旋轉平臺遠月端速度v1與近月端速度v2的表達式為式(1):

當ωl1、ωl2的值在1000 m/s以上時,遠月端速度將超過月球逃逸速度,而近月端速度則會減小到只有幾百米每秒。在旋轉過程中吊裝機構處相對月球的速度將在v1和v2之間變化,如果在特定點離開旋轉平臺,將會獲得大小在v1和v2之間的特定速度,這一過程不需要燃料消耗。與此過程相反,旋轉平臺接收質量時,也可以選擇特定的相位,從而無沖擊地接收速度大小在v1和v2之間的飛行器。在接收或者釋放飛行器的過程中,平臺整體的質心位置會發生一定的變化,但不會過多地偏離繩中心位置,對繩兩端速度影響不大。
載人登月任務包含地月往返和月面上下行的人員運輸過程,根據以上旋轉平臺速度特征,在旋轉平臺遠月端附近接收地月轉移飛行器或釋放返回艙;在旋轉平臺近月端附近釋放或接收登月艙;通過平臺自然旋轉實現遠月端和近月端轉換。
在組裝和釋放過程中,系統的機械能守恒、角動量守恒,而在對接和組裝之間的旋轉平臺飛行階段,航天員所在艙段的機械能和角動量會發生持續性變化,即旋轉平臺和返回艙、登月艙之間存在著能量和動量的轉移交換。在這一系列過程中,飛行器和平臺原則上不需要消耗推進劑進行軌道控制。
3.2 月面單級往返飛行器
旋轉平臺作為一種特殊類型的環月空間站,可以提供在軌燃料補給加注、在軌檢測維修等功能,為可重復使用飛行器提供了可能。且旋轉平臺大幅度降低了月面下降/上升的燃料需求,相比阿波羅任務,兩級式設計已經沒有必要,可以采用單級飛行器實現月面下降/上升,即單級往返。
月面單級往返運輸飛行器是本方案中的登月艙,在可重用旋轉平臺搭建完成后,被組裝到旋轉平臺中。該飛行器主要由密封艙、艙門、推進系統、著陸緩沖機構和對接機構組成(圖1a)。密封艙主要作為航天員工作生活的場所,同時放置一些重要的儀器設備;艙門主要供航天員進出;推進系統的構型主要包括2個推進劑儲箱和6個噴管;著陸緩沖機構采用四著陸腿的懸臂式著陸緩沖機構,著陸腿由主支柱、輔助支柱和足墊組成。
進行月面下降任務時,該飛行器在旋轉平臺的遠月端與系統分離,以相對月球較低的速度下降到月面;完成探測任務后,該飛行器上升至旋轉平臺近月端,與平臺近月端的對接機構完成交會對接。在下降與上升過程中,該飛行器始終是單級的。相比于Hoyt方案在距離月球1 km處釋放荷載并同時接收月面的荷載[15],該飛行器可在距離月球150 km左右的高度下降、著陸,并上升返回至旋轉平臺,具備足夠的機動能力,這也讓該運輸系統具備較大的容錯能力。
3.3 雙艙奔月單艙返回
由于旋轉平臺對環月制動和月地返回的變軌燃料需求趨向于零,傳統以軌道控制為主的服務艙不再必要,尤其是月地返回時,可以直接將返回艙拋回地球,即單艙返回。但是旋轉平臺和登月艙需要一定的物資補給,環月制動捕獲時需要修正異面偏差和控制交會對接,為此需要在奔月時設置一個額外的艙段,即雙艙奔月。
雙艙奔月單艙返回的設計是在可重用旋轉平臺搭建以及月面單級往返運輸飛行器設計的基礎上進行的。在搭建完旋轉平臺,并裝配好月面單級往返運輸飛行器后,即在環月軌道形成了配置了登月艙的月球軌道空間站。進行載人登月任務時,只需要發射返回艙與推進艙,并將其轉移至環月軌道,與旋轉平臺進行對接,此過程即為“雙艙奔月”。需要說明的是這里的推進艙,主要功能不僅是提供動力,更重要的是作為燃料運輸器。對接完成后,將人員轉移至登月艙,完成月面下降、探測與月面上升的過程;最后,由旋轉平臺將返回艙與推進艙送回月地轉移軌道,返回艙完成高速再入,返回地球,此過程即為“單艙返回”。
3.4 勾環式對接與魔方式吊裝
旋轉平臺的交會對接和分離釋放,現有技術不可能直接應用,為此設計了勾環式交會對接與魔方式吊裝結構,如圖5所示。
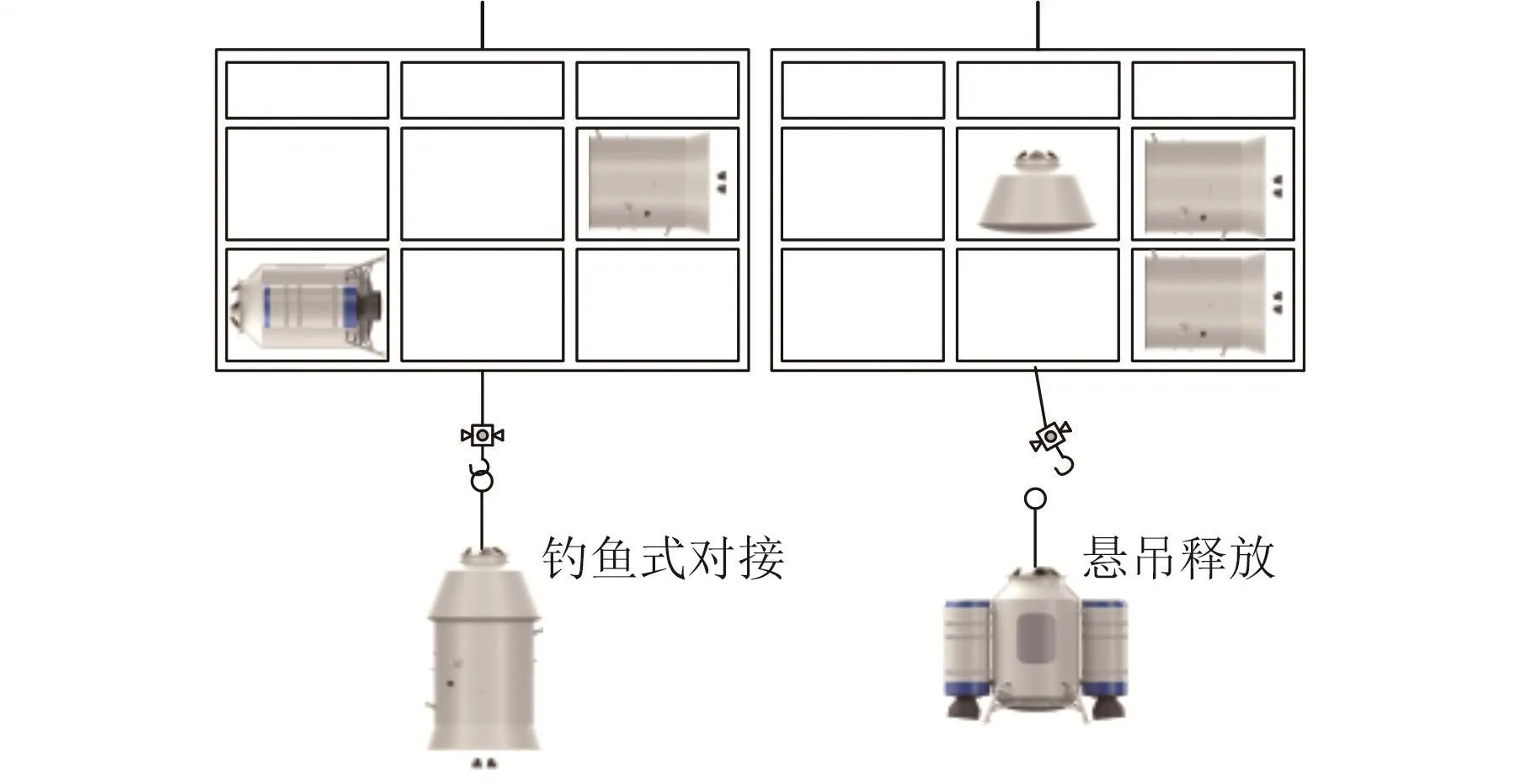
圖5 勾環式對接與魔方式吊裝結構Fig.5 Fishing docking and hoisting structure
在旋轉平臺吊裝機構處,由于離心力的作用,存在1g左右的人工重力場,在重力場中懸停、逼近等都需要付出高昂的成本,并且旋轉平臺的姿態和位置擾動也會遠大于空間站。因此本文設計了勾環式對接捕獲機構,將環固聯于傳統對接機構之上,將勾與吊裝機構上的柔索相連,并配置一定的運動控制能力,如圖5所示。交會對接時,由被吊裝飛行器(飛船、登月艙)實現快速交會,進入相對吊裝機構的懸停點附近,飛行器與旋轉平臺的吊裝機構部分處于相對靜止狀態,即兩者速度相等,位置接近;然后吊裝結構伸出繩與吊鉤,由吊鉤主動捕獲并勾住掛環,實現兩者之間的初始捕獲。
為便于集成化,本文將吊裝機構設計為網格框架,每個單元原則上可安裝維護一個艙段。在實現初始捕獲后,旋轉平臺將借助吊裝結構對飛行器布局進行旋轉重組,密封艙段將被運輸到生活艙段實現最后的對接,非密封艙段則會拆卸并裝配到其它部位。
勾環式對接方式能夠將6自由度的強約束交會對接簡化為3自由度相對運動控制問題,將初始捕獲與密封通道建立等問題分隔開來。魔方式吊裝結構可將艙段裝配問題集中到旋轉平臺上,降低了對各艙段的自主控制能力要求,更便于飛行器的管理與拓展。
4 可行性分析
4.1 工況設計
工況1:旋轉平臺日常運行狀態。此時為旋轉平臺搭建完成,進行載人登月任務前的狀態,平臺兩端質量均為28 t;
工況2:地月往返飛行器對接至旋轉平臺。地月往返飛行器經過地月轉移,假定推進艙消耗1 t燃料,即平臺對接了返回艙(6 t)與推進艙(5 t),一端質量增加至39 t,另一端仍為28 t;
工況3:登月艙與平臺分離,完成月面下降。此時平臺對接了返回艙的一端分離了8 t的登月艙,質量變為31 t,另一端質量仍為28 t;
工況4:登月艙月面上升,與平臺對接。完成月面上升后,登月艙質量變為4.5 t,對接至原艙段,平臺對應的一端質量變為35.5 t,另一端質量仍為28 t。
工況5:返回艙分離,完成月地返回。此時旋轉平臺釋放重為6 t的返回艙,一端質量變為29.5 t,另一端質量仍為 28 t。
4.2 旋轉平臺過載
在5種工況下,進一步考慮約束條件:繩中的最大拉應力小于允許的極限拉應力;載人飛船在完成對接后,宇航員承受的過載維持在1g左右。同時,為了便于對旋轉平臺進行理論分析與計算,減小問題的復雜程度,可作以下假設:
1)旋轉平臺的繩符合等截面、勻質的條件。
2)旋轉平臺的繩模型采用繩系衛星中常用的剛性桿模型,即忽略繩的彈性和柔性,將其視為一根不可拉壓的剛性桿。
3)繩兩端機構的尺寸相比于整個旋轉平臺的規模可以忽略不計,即在分析平臺整體運動時可將其視為質點。
根據上述約束條件和假設條件,分別計算5種工況下旋轉平臺兩端的過載(記為過載1和過載2,其中過載2對應對接了載人飛船的一端)、繩中的最大拉力、繩的安全系數(繩的極限拉力與各工況下繩的最大拉力的比值)等數據,如表1所示。
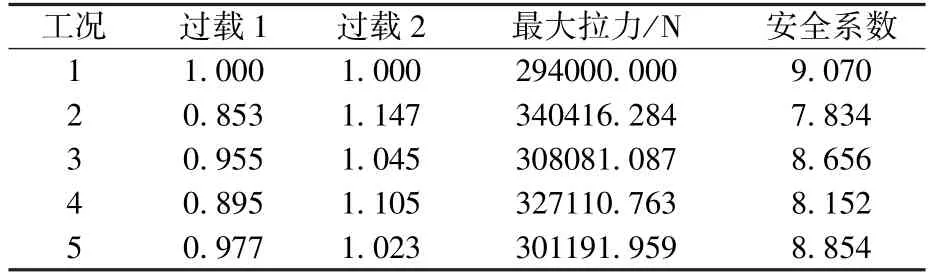
表1 不同工況下平臺數據Table 1 Data of platform in different conditions
根據表1結果可知,不同工況下旋轉平臺整體質心位置變化對過載影響較小,旋轉過載的變化量控制在15%以內,這也表明平臺整體的質心不會過多地偏離繩中心位置;同時,全過程中繩的安全系數保持在7.8以上,具備較強的安全性能。綜上所述,在整個載人登月任務過程中,認為平臺旋轉過載以及繩的強度滿足約束條件要求,旋轉平臺的設計具備可行性。
4.3 運行軌道
將旋轉平臺簡化為質點串模型,即:將平臺兩端吊裝機構分別視為質點,將繩的質量集中于繩中點位置,三者通過無質量剛性桿連接。通過對每一質點進行受力分析,求外力對質心的合力和合力矩,來研究該旋轉平臺的軌道運動。
考慮月球引力常數μ=4.90280031×1012m3/s2,取月球平均半徑為1738.2 km,初始軌道傾角i=45°,偏心率e=0.020,升交點赤經Ω=45°,近心點幅角ω和真近點角f均為0,旋轉平臺質心的初始高度為300 km,旋轉平臺初始自轉平面與其質心所在軌道平面重合。采用二體運動模型,分析該質點串模型在5種工況下的軌道數據,結果如表2所示。
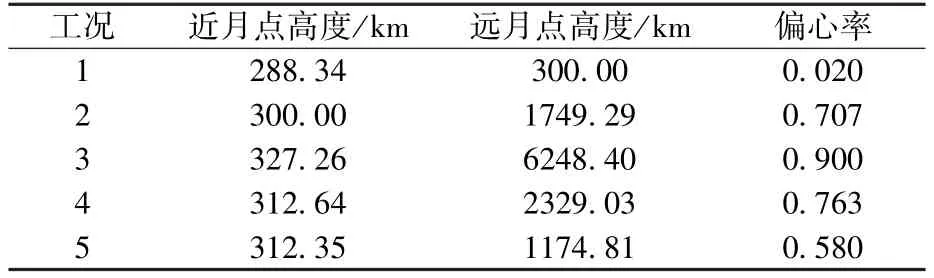
表2 不同工況下軌道數據Table 2 Orbital data under different conditions
任務全過程中,由于對接時相對速度控制為零,且二體模型下沒有考慮擾動,所以,旋轉平臺的自轉角速度始終保持不變,且平臺自轉平面始終在軌道平面內。旋轉平臺質心運行軌道的軌道傾角、升交點赤經等保持不變,且平臺始終位于月球的引力球范圍內。
4.4 技術挑戰
1)先進的繩系材料與加工技術
高強度吊繩的材料制備、結構加工、空間防護、纏繞釋放等都需要最前沿的技術發展。
2)大型環月載人旋轉平臺構建技術
“秋千式”旋轉平臺是一種全新的空間站理念,且需要環月部署。
3)快速交會對接和空間組裝技術
勾環式交會對接和魔方式吊裝結構方案,離具體實現還有很長的路要走。
4)月面單級往返運輸飛行器技術
涉及到亞軌道飛行、月面軟著陸、可重復使用等技術,需要在現有航天器技術基礎上有所發展。
5)大型環月載人旋轉平臺使用維護技術
涉及到平臺補給、維修、軌道和姿態維持、任務調度規劃等一系列問題。
6)新型返回艙技術
需要支持3~4人、5天左右單艙獨立飛行,和目前典型的三艙、兩艙載人航天器構型有較大差異。
5 發射成本分析
5.1 發射質量
發射質量的節省主要體現在雙艙奔月單艙返回的方式中。
旋轉平臺的搭建共有4次發射任務,發射質量分別為 24 t、24 t、8 t、8 t。 經過 4 次發射后,旋轉平臺就已經搭建完成,且2個可重用登月艙已經分別布置與平臺兩端。之后進行的載人登月任務,單次任務的發射質量為12 t。參考阿波羅任務中Apollo 11號45.7 t的單次載人登月任務發射質量[1],采用本方案進行2次載人登月任務時,總發射質量約為88 t,而采用Apollo 11進行2次任務,總發射質量達90 t以上;同時,在后續載人登月任務中,單次發射質量始終控制在12 t左右,即單次發射質量可減小至Apollo 11的1/3以內。
5.2 速度增量
速度增量的節省主要體現在利用旋轉平臺完成月面下降/上升過程以及地月/月地轉移過程中。
月面下降/上升任務利用旋轉平臺的近月端對接或釋放單級登月艙,平臺質心繞月球運行的速度約為1550 m/s,而平臺兩端相對平臺質心的速度約為1250 m/s,所以登月艙進行月面上升或下降任務時,考慮到交會對接和一定的機動能力,速度增量只需500 m/s。再考慮傳統的阿波羅方案,指揮艙所在的環月軌道高度約為110 km,對應的登月艙速度增量需1200 m/s[1]。因此,借助旋轉平臺完成登月任務時,月面下降/上升的速度增量需求能降低至阿波羅任務的1/2以上。
進行地月/月地轉移任務時,利用旋轉平臺的遠月端對接地月飛行器或釋放返回艙。按照前文的參數設定,平臺遠月端相對于月球的速度可達到2800 m/s,基本達到月球逃逸速度。因此,借助旋轉平臺完成登月任務時,可以認為基本不需要近月制動和月地返回速度增量。
6 結論
1)旋轉平臺搭建完成后,單次任務的發射質量控制在12 t左右,相比于阿波羅計劃中45 t左右的質量,可將發射質量減小至阿波羅飛船的1/3以內。
2)借助旋轉平臺完成登月任務時,基本不需要近月制動和月地返回速度增量,月面上升速度增量需求也能降低1/2以上。
3)可重用旋轉平臺、可重用月面單級往返飛行器的設計能夠有效增加任務次數,充分提高任務的經濟性。
4)旋轉平臺中繩的強度以及平臺自身軌道運行具備可行性,且有一定的安全余量。