空間站結構數字化協同設計中的計劃管理
2019-08-29 01:51:38帥林星翰
載人航天 2019年4期
張 帥林星翰
(1.北京空間飛行器總體設計部,北京100094;2.北京醫學院附屬中學,北京100191)
1 引言
基于模型定義(Model-Based Definition,MBD)的數字化協同設計技術廣泛應用于我國空間站結構的研制中,基于傳統二維圖紙的研制模式正在向基于三維數字化模型的研制模式轉變[1-2]。傳統的研制管理模式已無法勝任諸如空間站這種研制周期緊張、協作范圍廣、結構難度大的超大型復雜航天器工程任務的進度需求。因此,開展空間站結構數字化協同設計中的計劃管理研究具有重要意義。
我國空間站結構研制首次采用全數字化協同設計的模式,國內衛星的數字化協同已深入應用[3],但并未提及如何進行計劃管控。載人航天器的數字化協同僅有局部案例的嘗試經驗[4],對結構協同設計管理并未深入探討。這些研究對于解決我國空間站結構數字化協同設計中的計劃管理具有一定的借鑒意義。而對于國外數字化協同設計的計劃管理經驗,特別是針對諸如空間站的復雜載人航天器,尚未見到公開發表的文獻。
傳統的航天器結構研制計劃管理模式是基于二維圖紙和文檔的管理[5-6],當前我國空間站的數字化協同研制進程中主要存在3個方面的不足:①傳統對二維圖紙和文檔的計劃管理方式,難以及時把握模型設計的中間設計環節和上下游間設計狀態變化、更改與落實,往往由于設計輸入的更改造成計劃延誤的情況;②傳統的二維結構研制計劃評估機制難以準確地估算各模型設計工作量,使得項目初期制定的研制計劃與實際執行偏差較大;③傳統的調度集同協調會的方式雖能解決主要問題,但人力物力投入高,且信息傳遞和轉化效率低。
本文針對上述問題,基于對空間站數字化結構協同設計特點的分析,提出一種適用于三維數字化協同設計、技術流程逐層解耦的管理方法,建立一套基于模糊統計和平衡線調度原理的三維模型投產計劃評估機制,并優化溝通管理模式,從而高效完成空間站結構三維協同設計任務。
2 空間站數字化協同設計的特點
空間站三維協同設計采用的是自頂而下的方式進行,結構模型架構采用4層模型架構,即構型層、艙段層、表達層和設計層。總體模型也采用類似的4層模型體系,各層級與結構模型一一對應。某艙體的三維設計模型架構層次及信息交互過程如圖1所示,圖中的箭頭表示三維協同各模型層級的信息交互過程。
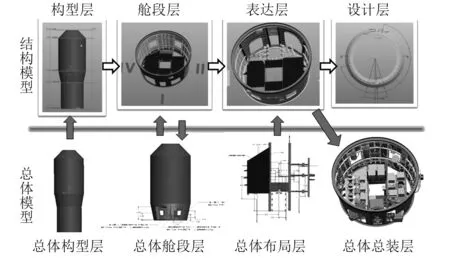
圖1 三維協同設計模型架構層次及信息交互Fig.1 Model architecture and information interaction based on 3D collaborative design
結構通過引入總體構型層的已發布的幾何信息形成構型層模型,然后根據構型層信息和總體艙段層的大開口信息在艙段層開展結構方案設計,確定主結構參數、次結構形式及其結構參數。表達層是結構協同設計的核心層,根據結構艙段層發布的幾何信息和總體布局層發布的幾何信息在該層開展詳細結構設計。第4層設計層模型則是表達各零部件的詳細設計信息及下發到生產廠家的生產信息,是面向制造的模型。
各層級間交互的信息主要分為總體對結構的輸入信息、結構對總體的輸出信息和結構內部的接口信息,以及面向生產的制造信息。可以看出,空間站數字化協同設計的特點是自頂向下的設計過程,各層級間模型架構清晰,協同設計過程的核心是各層級間的信息交互。因此,如何有效控制設計雙方信息交互效率和正確性是確保高效完成數字協同任務的關鍵所在。
3 基于技術流程逐層解耦的管理方法
傳統的文檔式結構設計都是總體輸入到位后,才展開航天器整器結構設計及力學分析,總體可能根據結構初步設計結果會更改輸入。當出現這種迭代設計時,設計過程需重新開始,結構設計師根據更改后的輸入再進行新一輪詳細設計。當設計得到確認后,再集中將圖紙下發到生產廠家開始投產,如圖2所示。
在上述過程中,信息接收和轉化效率低,局部更改周期冗長,與縮短研制周期的航天發展趨勢不相適應。為有效提高研制效率、縮短設計周期,計劃管控首先從設計流程入手,將結構與總裝之間的迭代設計過程劃分為4個階段,并對每個階段的設計變量進行固化和控制,特別是在劃分艙段層和表達層內容時,將信息分層次解耦。以三維模型作為信息載體,確保各階段間不發生耦合,使各部組件、零部件相互間解耦,從而實現串行向并行研制的轉變。這樣就可以確保設計迭代只發生在表達層,設計師僅針對需更改的局部零件重新進行詳細設計。當設計得到確認后,將設計層模型下發到生產廠家進行投產。這種優化后的結構三維協同設計流程如圖3所示。
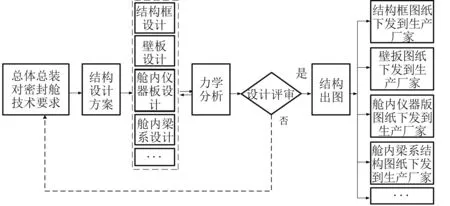
圖2 傳統的航天器結構設計流程Fig.2 Traditionalspacecraftstructuraldesign process
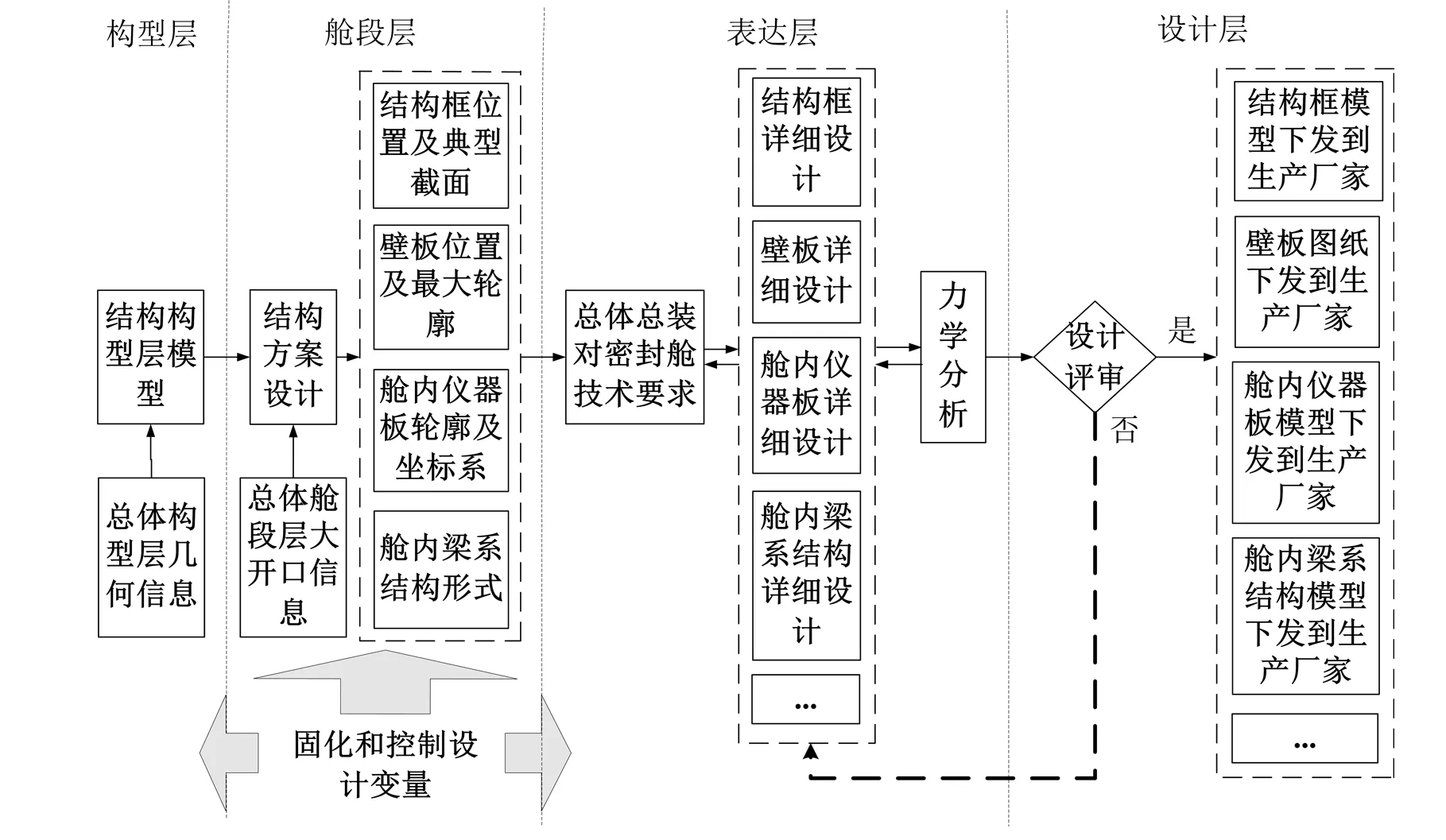
圖3 優化后的航天器結構三維協同設計流程Fig.3 Optimized spacecraft structural design process based on 3D collaborative design
由圖3可見,當設計層的單個零部件(如結構框、壁板、艙內儀器板和梁系等)的結構設計發生變化時,僅需在表達層調整輸入和局部更改設計,不會影響到艙段層模型的整體接口狀態。各零部件的設計在時空上是彼此獨立的。這樣,只要某個零部件狀態確定,就可以安排設計投產,從而實現零部件的動態并行設計。因此,通過對技術流程的逐層解耦,局部的更改不會影響其它結構的設計和投產,提升了研制效率。
4 三維模型投產計劃評估模型
當進入表達層開始結構模型的詳細設計時,需要建立1套有效的計劃評估機制,能夠準確估算各模型設計的工作量,能夠準確和高效地銜接設計部門與生產廠家的計劃,這對空間站這樣的大型復雜載人航天器結構研制顯得尤為重要。
在三維協同設計初期,根據模型復雜程度和設計人員的經驗,依據模糊統計原理[7-8]對各類結構模型設計工作量的實際取樣,得到不同結構類型模型的設計工作完成時間及難度系數,如表1所示。表中D0表示基準模型的難度因子,α0為基準模型設計的典型工作量。
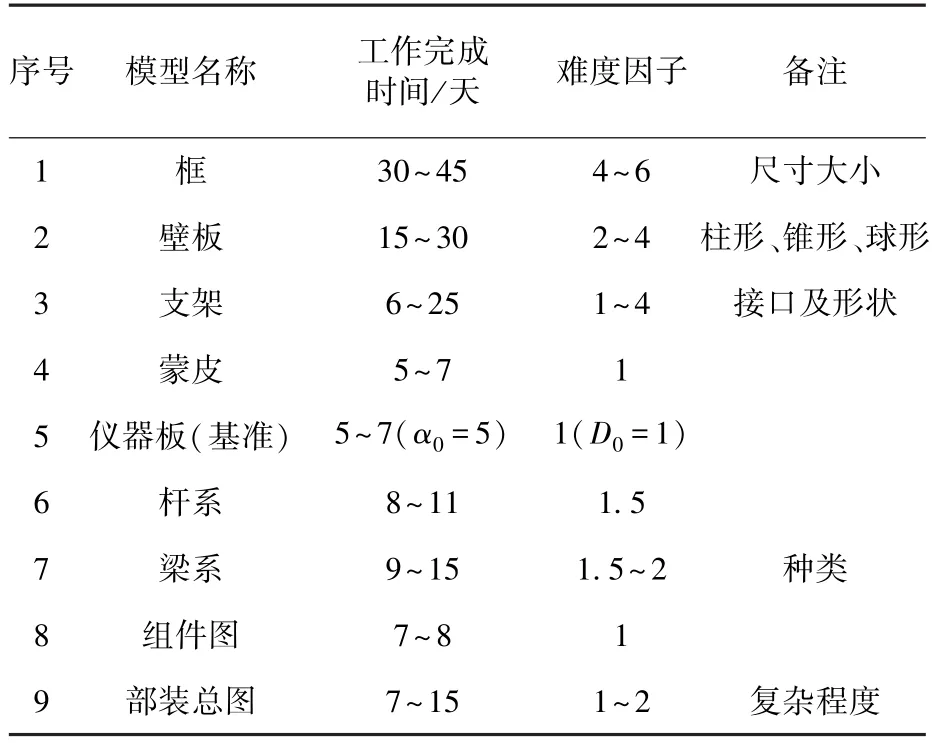
表1 不同結構類型模型的設計工作完成時間及難度系數Table 1 Production cycles and difficulty coefficients for model design with different structure types
取儀器板(結構板)完成時間作為計劃評估的基準模型,設D0=1,對應的α0=5,其它結構類型模型根據工作量評估的大小,分別量化得到不同的難度系數。
在制定結構投產計劃時,由于各零部件的技術狀態已經確定,可將每個結構模型的詳細設計的管理過程近似為重復性的模塊化管理。假設某個模型的計劃完成時間為G,則依據平衡線調度原理得到不同模型的計劃評估模型[9-12]為式(1)。

式中,D為難度因子,表示不同模型的難度系數。β為設計過程本身消耗的時間(β≥0,一般取0.5的倍數),與設計工具、初始建模、基線控制、協同迭代等因素相關,對于成熟的模型設計,該部分時間可忽略不計。
根據工程項目的學習效應[13-14]對進度的影響,認為某個零部件的更改設計由于個人設計經驗的增加和設計工具的改進,該模型設計所需要的時間會隨著設計次數的增加而逐步減少。因此,對于更改模型或相似度很高的模型,其評估模型可近似變形為式(2)。

其中,A為模型累計設計次數,n為學習系數(n≤0)。 當A=1,n=0時,G1=G,表示該模型首次設計所需要的典型設計工作完成時間。當學習效應一定時,同一模型更改次數越多,模型設計所需要的時間越短。
當空間站下達結構投產任務時,首先由圖3的表達層分析識別出投產結構的種類(如結構框、壁板、艙內儀器板、艙內梁系等),從表1中根據各模型的復雜程度確定不同結構的難度因子D的系數,然后將式(1)帶入式(2)中,由式(2)得到不同類型結構的設計工作完成時間,再根據不同投產結構的數量,求和得到投產任務的總工作量。最后,根據當前型號任務需求的緊迫性和計劃節點,動態均衡地調配設計人員投入,制定出有效準確的投產計劃。當計劃出現較大偏差時,根據剩余工作量可以短時間內加大設計人員投入,確保按期完成任務。
5 基于模型層次化的信息溝通模式
為合理調配資源,確保研制進度的有效實施,在三維協同初期就開始調整信息交互雙方的溝通模式。根據空間站三維協同設計的特點,將結構與總體之間的三維協同按照構型層、艙段層、表達層和設計層4個層次逐層展開。首先,從頂層接口協同開始就約定以模型控制文件的形式明確和規范各層次結構設計輸入信息的表達方式、參數類型和變化范圍等。其次,設計輸入信息以層次化的形式從4個階段逐層分解協同,從系統、分系統、部組件、零部件自頂向下的逐級傳遞。最后,在表達層,針對不能短期落實設計輸入的局部結構,逐層解耦后納入專項風險管理,待輸入明確及時落實設計任務。
這種基于模型層次化的溝通模式具有目標明確、層次清晰和迭代可控的特點。這種溝通模式一方面使原有形式自由、無統一標準的協同方式轉變成分層次的、可量化的、精細化的信息傳遞協同方式,減少了調度會式協同,從而降低了人力、物力的過多投入,使有限資源更多地投入到設計重點、難點中去;另一方面避免了在設計輸入條件反復更改以及輸入不及時、不能一次到位帶來的設計被動,而是形成主動控制,及時調整輸入變化而帶來的結構設計變化和風險,提高了整個結構設計的信息轉化效率。
6 應用案例
與載人飛船和天宮一號相比,空間站結構研制周期相對縮短了30%以上,對型號研制進度起到重大促進作用。載人飛船和天宮一號結構均采用傳統的二維設計研制模式,其研制周期為8個月,而空間站結構的研制工作量約為載人飛船和天宮一號的3倍。空間站的天和一號、問天和夢天3個航天器的結構研制分別歷時1年零6個月、1年零2個月和1年零4個月,采用上述空間站結構數字化協同設計中的計劃管理方式,大大短于研制周期的預期。載人飛船和天宮一號結構研制持續投入設計人員15人,而空間站天和一號結構研制動態調配設計人員11人,人員減少4人;問天和夢天結構三維協同設計借鑒天和一號的研制經驗,不斷優化和提升協同效率,分別動態投入7.5人就完成了全研制任務,其人力資源較天和一號又釋放了近1/3。
7 結論
1)所提出和實施的基于技術流程逐層解耦的管理方法,可全面掌握結構各零部件的動態設計過程,實現對結構研制的全過程管理,有效地控制和縮短設計周期。
2)建立的三維模型投產計劃評估機制,在面向生產模型下發到生產廠家任務分解時,根據計劃評估方法得到不同類型結構的投產周期,合理調配人力資源投入,使得項目初期制定的研制計劃與實際執行高度匹配。
3)優化的溝通管理模式,從頂層接口協同開始分層次規范和約束設計輸入,主動識別輸入變化而帶來的結構設計變化和風險,及時解決了因輸入條件反復和更改帶來的設計變化。
4)所提出的結構數字化協同設計的計劃管理方法已在空間站的結構研制中得到全面驗證和實踐。空間站結構與我國載人飛船和天宮一號相比,其研制周期相對縮短了30%左右,人力資源釋放了近1/3,對復雜航天器結構數字化協同設計管理提供了良好的借鑒。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
中華手工(2017年2期)2017-06-06 23:00:31
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
現代企業(2015年9期)2015-02-28 18:56:50
中外會展(2014年4期)2014-11-27 07:46:46