庭院服務機器人自主充電對接方法研究
2019-09-02 09:17:52李倩崔煒秦月雅彭國旗
長春理工大學學報(自然科學版) 2019年4期
關鍵詞:區域
李倩,崔煒,秦月雅,彭國旗
(長春理工大學 電子信息工程學院,長春 130022)
庭院服務機器人,可以實現自主巡邏、收取快遞、草坪修剪、垃圾運送等功能,具有靈活、便捷的特征,將廣泛應用于庭院和智能小區管理。自主充電能夠使機器人在無人干預的情況下長期處于正常服務狀態,為機器人的使用帶來極大方便。國內外的學者對自主充電進行了廣泛研究,K.L.Su和J.H.Guo等使用激光測距儀和路標指示進行機器人自動充電對接[1],成功率高達99%,但對路標指示安裝位置要求嚴格,且激光測距精度易受外界環境干擾。Cassini等設計了一種通過光線束引導機器人與充電站進行自主充電的方法[2],該方法的導航布置復雜、成本較高、對環境適應性較差。張天昀使用光電傳感器完成機器人室內定位與自動充電,使用航跡推算使得整個系統累積誤差增大,同時光電傳感器限制整個系統的速度[3]。黃穎等運用紅外激光和攝像頭輔助機器人自主充電,高效準確但作用范圍小,同時增加了成本。由于室外機器人充電系統環境復雜,以上方法過多依賴室內環境,易受外界環境(陽光等)干擾使得自主充電的準確率和效率降低,黎陽生等將激光測距方法運用到室外機器人自主充電中,使用等腰三角形物體等硬件輔助消除干擾,雖然提高了成功率但增加成本和降低效率。
上述方法不能較好滿足庭院服務機器人自主充電需求,本文將RFID導航技術、磁導航和九軸陀螺儀相結合,設計一種庭院服務機器人自主充電對接方法,利用蟻群算法實現了最優路徑選取,具有對接速度快、受環境影響小、穩定性高、成本低等特點。
1 自主充電對接系統
本文以輪式庭院服務機器人為研究對象,庭院服務機器人自主導航定位組成結構如圖1所示,機器人采用四輪結構,前兩輪為驅動輪,后兩輪為萬向從動輪。
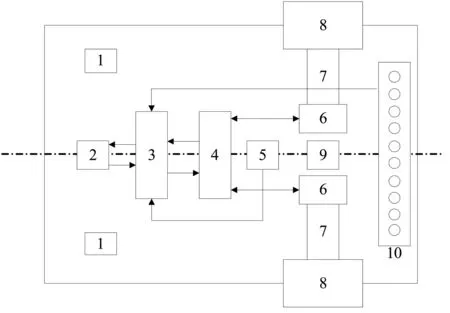
圖1 機器人導航定位原理圖
主控處理器通過電機驅動器控制電機運動,并通過光電編碼器實時返回電機速度,實現對機器人行走速度的準確控制。在機器人檢測到電量不足的情況下,停止服務任務,進入充電模式,機器人將充電命令通過WIFI模塊發送給充電站,充電站接受到命令進入準備充電狀態。此時機器人會根據RFID定位系統獲取機器人實時位置,結合已知的電磁軌道起始位置,運用蟻群算法制定最優的導航路徑。機器人運動到電磁軌道起始處,安裝于底部的電磁傳感器檢測機器人相對于軌道的偏移量,并結合九軸姿態傳感器GY953獲取的機器人方向信息,得到電機控制量,電機驅動器根據控制量完成兩主動輪的差速控制,實現機器人沿著電磁軌道直線運行,進而與充電站進行精準對接,通過獲取充電站中3個限位開關的狀態來判斷對接狀態,若對接成功便可開啟充電模式。
2 自主充電對接方法
為了提高機器人與充電樁的對接準確率,將室外庭院環境分為對接區域和非對接區域,如圖2所示,電磁導航區域為對接區域,機器人R在該區域進行姿態調整以便達到準確對接[4],除電磁導航以外區域為非對接區域,該區域中機器人只需要導航至O處,可以忽略機器人姿態問題,因此本文將對接過程分為遠距離導航和近距離對接。
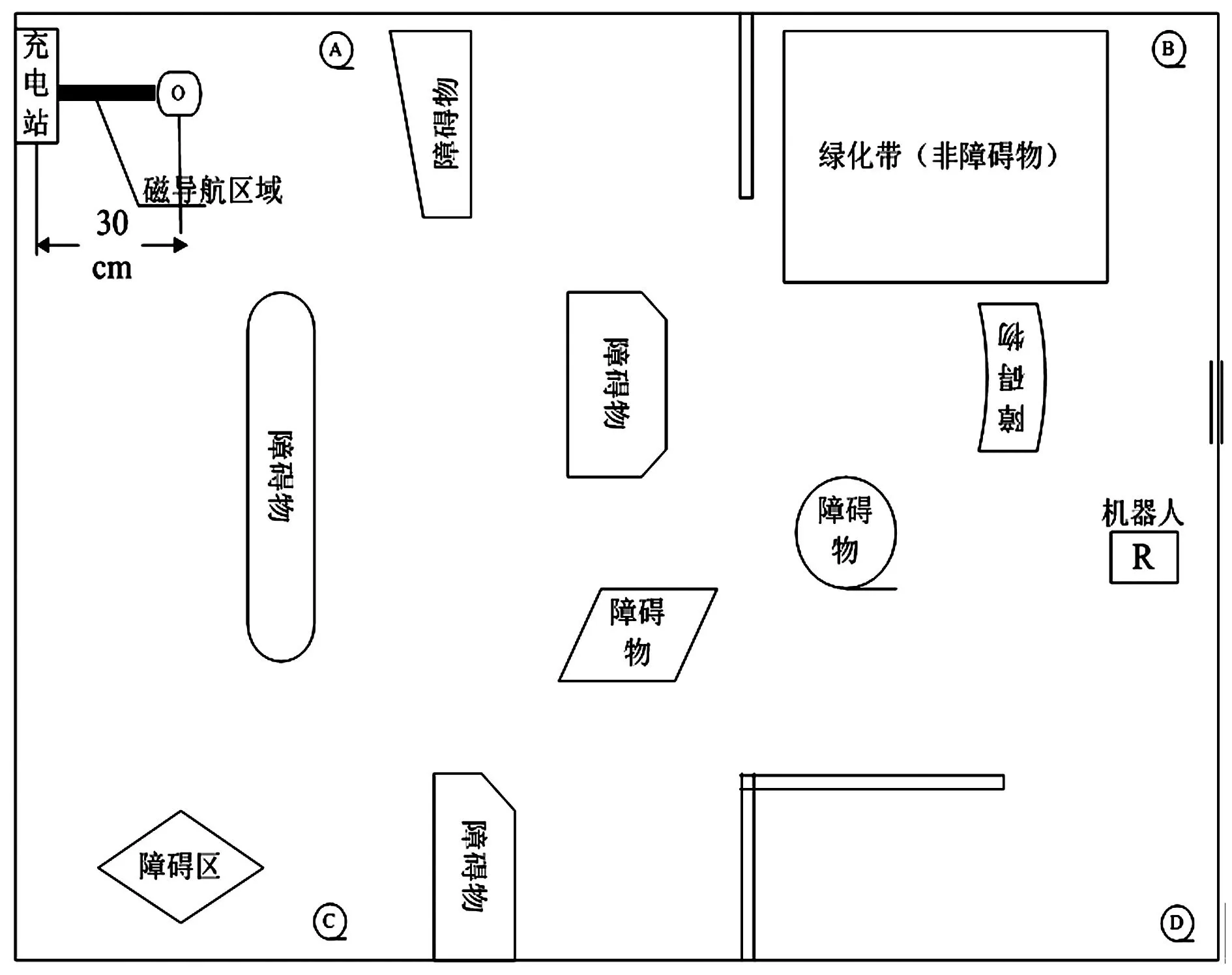
圖2 庭院環境簡化結構
2.1 遠距離導航
為了方便對接區域的準確對接,在非對接區域,機器人將導航目標位置設為圖2所示的O處,機器人到達O處后,停止遠距離導航進入近距離對接任務。
在非對接區域,獲取精確的機器人位置至關重要,精確的位置可以有效減少對接調整時間。當機器人電量低于閾值時,觸發充電任務,由于機器人可能在庭院的任何位置,此刻首要任務就是確定機器人的位置。將3.5GHz超帶寬(UWB)的DWM1000射頻傳感器安裝于庭院的四個角落和輪式機器人中心處,A、B、C、D為閱讀器,機器人上為有源電子標簽,為了消除射頻傳感的鐘差,運用基于TOA的不對稱雙向測距[5]獲得電子標簽距離信息,如圖3所示。
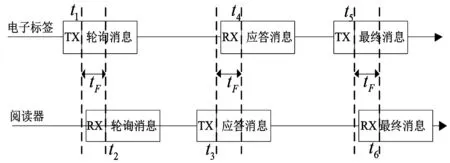
圖3 不對稱雙向測距原理圖
不對稱雙向測距飛行時間tF為:

從而得到距離d=c×tF,其中,c為光速。
機器人上的電子標簽依次輪詢閱讀器A、B、C、D,測得電子標簽與四個閱讀器之間的距離依次為dA、dB、dC、dD。
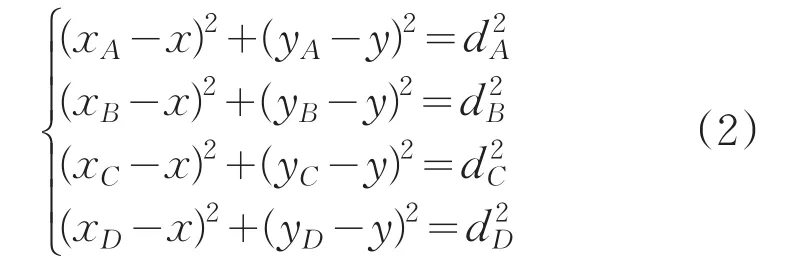
采用極大似然估計實現機器人定位。已知4個閱讀器的坐標分別為A(xA,yA),B(xB,yB),C(xC,yC),D(xD,yD),假設機器人坐標為(x,y),建立機器人與四個閱讀器的距離方程組[6]為:
將方程組前三個方程分別減去第四個方程,得到線性化方程為:

其中:
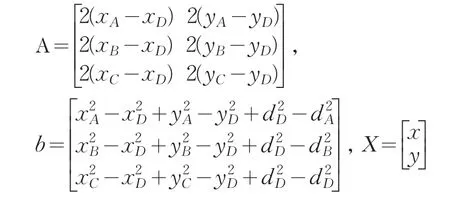
使用最小二乘法求解式子(3)可得到機器人的坐標位置值。
獲得機器人坐標后,首要任務是將機器人導航至目標位置O處。此時會有兩種情況:
庭院中障礙物均是固定位置,對接區域屬靜態場景。采用柵格法[7,8]建立庭院機器人的運動環境模型,為了機器人能安全通過,障礙物邊界未占滿柵格,也認為占據整個柵格。將非對接區劃分成等間隔柵格,且柵格的大小由機器人決定,機器人不能通過的地方為實心區域,可通過地方為空心區域,建模如圖4所示。
圖4中每一個柵格都可用坐標(x,y)來唯一標識,柵格化后,機器人只能向8個方向運動,由于傳統的蟻群算法存在容易陷入局部最優路徑或收斂速度慢等問題,于是在柵格路徑選擇上使用改進蟻群算法[9,10]。
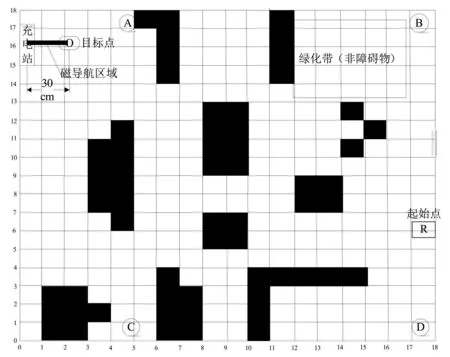
圖4 柵格法環境模型圖
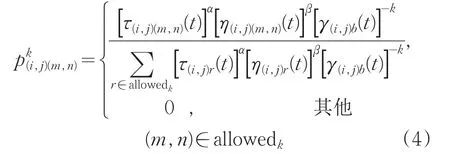
其中,r為柵格(i,j)下一個可選柵格,b為障礙物,α為信息啟發因子,β為期望啟發因子,[γ(i,j)b(t)]-k=mind[(i,j),b]是螞蟻從柵格(i,j)到障礙物b的權重倒數,η(i,j)(m,n)(t)為啟發函數。
由于螞蟻分泌的信息素會隨著時間變化逐步揮發,假設ρ(0<ρ<1)為信息素衰減程度,1-ρ為留存的信息素程度。因此完成一次遍歷便對路徑中信息素按下式進行更新:
其中,M、N為尋找到最優路徑[11]的螞蟻個數和最長路徑螞蟻個數,lmin、lmax為最優和最長路徑長度期望值。
當庭院中存在移動障礙物時,通過障礙物攜帶的電子標簽,實時獲取其位置。在靜態全局路徑規劃的基礎上,利用蟻群算法沿著全局路徑的方向進行局部尋優[12],從而有效地避開動態障礙物,實現動態環境下快速達到目標點。
2.2 近距離對接
當對接不精確時,容易發生接觸不良,損壞機器人和充電站。因此,機器人必須進行近距離精準對接,通過磁傳感器、九軸傳感器獲得機器人的方向和位置信息,對該信息進行分析處理,完成近距離對接任務。
在非對接區域,沒有考慮機器人姿態,進入對接區域時,輪式機器人方向具有隨機性或電磁傳感器沒有檢測到電磁軌道,因此,在對接區域必須對機器人姿態進行修正,以達到滿足自主充電系統對接要求。近距離對接過程如下:
(1)機器人進入對接區域,即機器人處于O處,啟動近距離對接程序;
(2)通過傳感器獲得機器人方向和位置信息,判斷機器人是否與充電站墻壁垂直,機器人是否與電磁軌道相交;存在如下判斷結果:
①方向垂直,機器人與電磁軌道相交,執行步驟(3)。
②方向垂直,機器人未與電磁軌道相交,或方向不垂直,機器人未與電磁軌道相交,此時機器人原地順時針轉動。轉動過程中,電磁傳感器檢測到磁條,停止轉動執行步驟(2);轉動過程中,電磁傳感器沒有檢測到磁條,開啟RFID定位,獲取機器人位置進行導航,若與目標O處之間沒有障礙物,機器人直接運動至O處,若有障礙物運行蟻群算法進行路徑規劃,以最優路徑引導至O處后,執行步驟(1)。
③方向不垂直,機器人與電磁軌道相交,以充電站到O處的方向為正方向。與軌道成銳角,機器人原地逆時針轉動,直到電磁傳感器再一次檢測到磁條,停止轉動執行步驟(2);與軌道成鈍角,執行步聚(3)。
(3)機器人通過電磁傳感器檢測相對于軌道的偏移量,結合九軸傳感器檢測到的角度偏差量,計算兩輪差速控制量,運用模糊控制進行近距離處理,執行步驟(4);
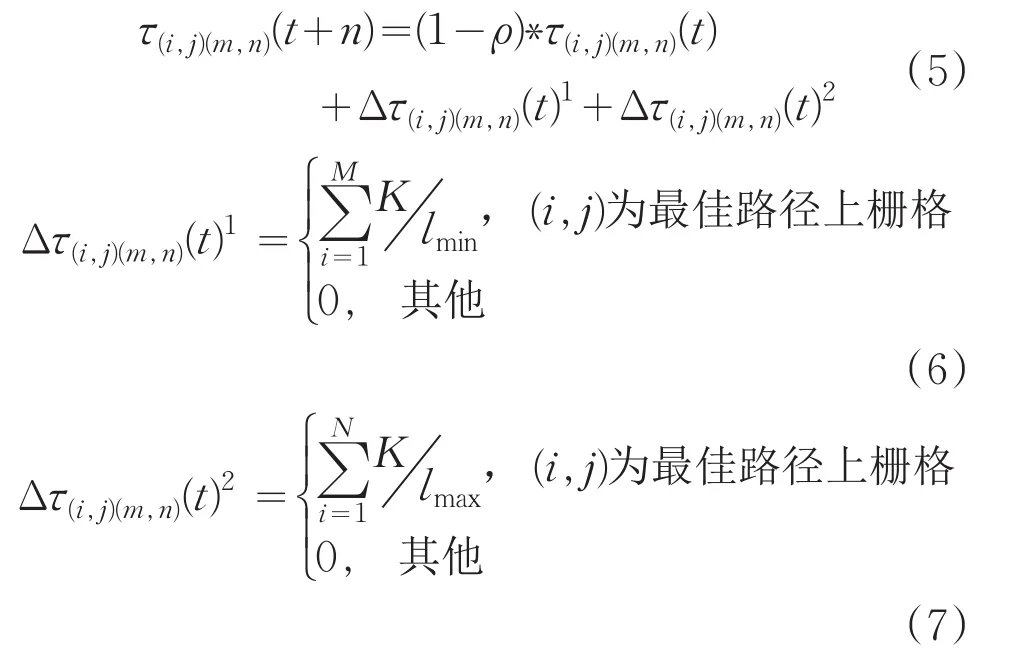
(4)與充電站對接過程中,通過3個限位開關的狀態反饋充電對接狀態:①限位開關C未觸發,Z、Y至少觸發一個,說明沒有準確對接,機器人直接向后倒退0.8m,執行步驟(2);②限位開關C、Z、Y均觸發,說明正確對接,執行步驟(5)。
(5)機器人與充電站完成對接,停止移動,進行充電任務。
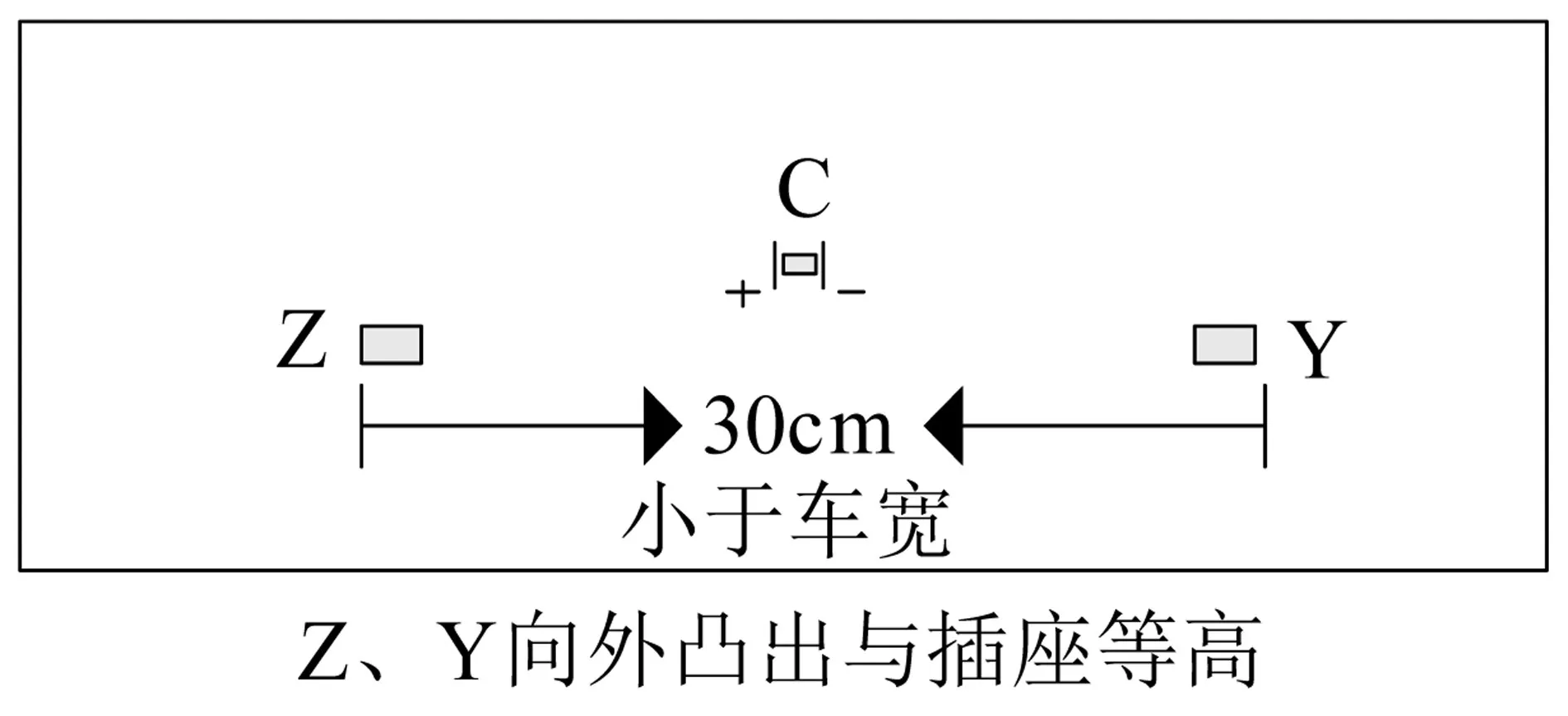
圖5 限位開關安裝位置
經過上述5步,即可完成機器人與充電站精準對接,實現安全可靠的充電條件。庭院服務機器人自主充電對接整個流程如圖6所示。
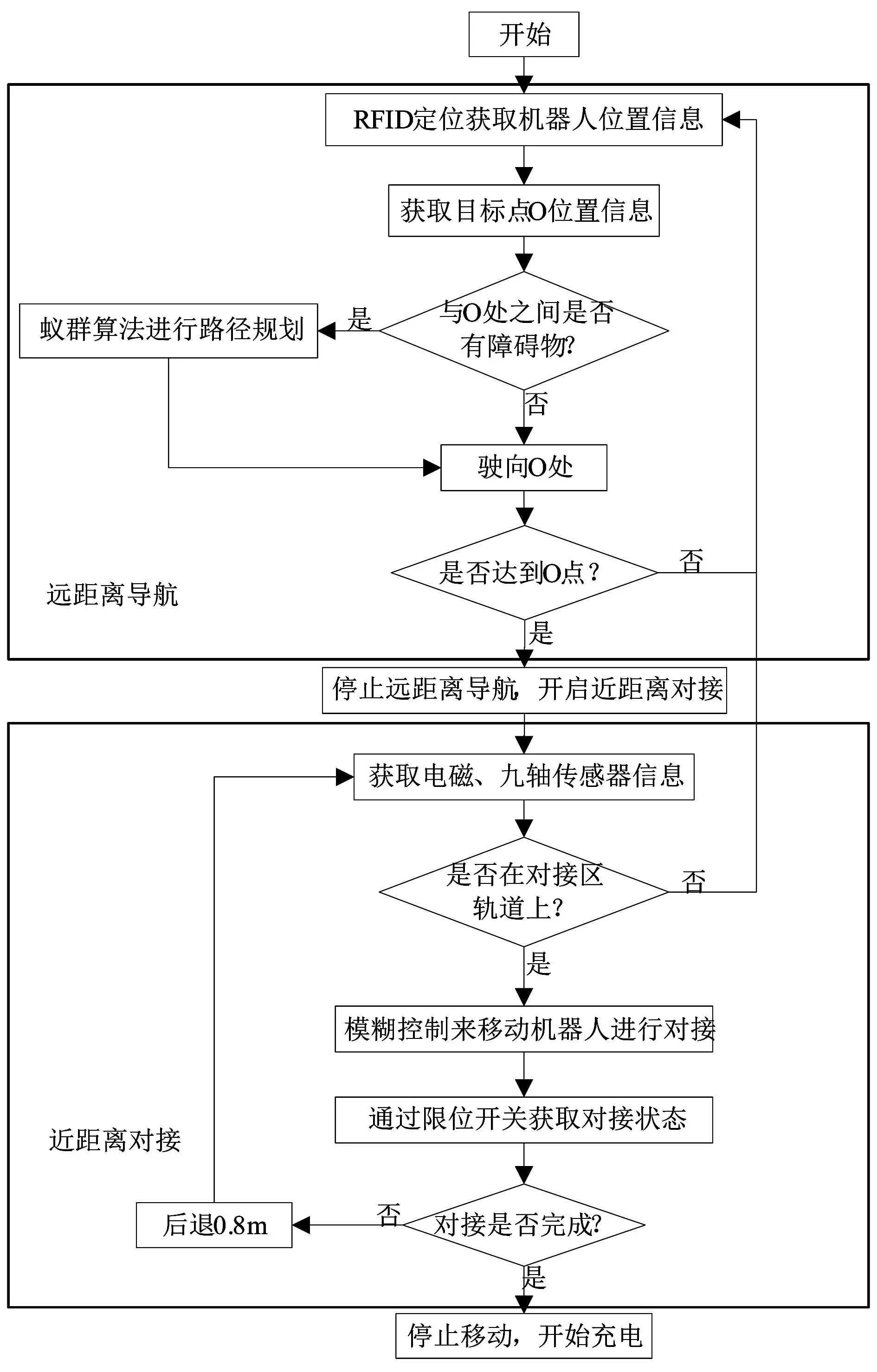
圖6 對接流程圖
3 目標對接仿真
為了驗證該自主充電對接方法的可行性、準確性以及實用性。對機器人導航能力進行仿真,其中路徑規劃參數:螞蟻數m=50,迭代次數n=100,信息素增加強度Q=1,信息啟發因子α=1,期望啟發因子β=7,信息素衰減程度ρ=0.3。得到三條不同起始位的置最優路徑如圖7所示,圖8中收斂曲線顯示,60次迭代后,曲線已經收斂。
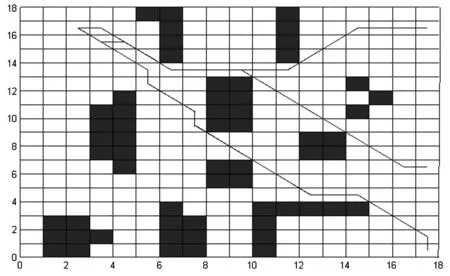
圖7 蟻群算法最優路徑

圖8 蟻群算法收斂曲線
忽略機器人在彎道上速度的衰減,不考慮遠距離導航和近距離對接過程的切換時間,設對接區長度為1m,機器人速度為20cm/s。分別取與電磁軌道成 0°、30°、45°、60°和 90°五個方向的6個不同距離完成對接時間與距離關系仿真,如圖9所示,其中最下邊的線段表示無障礙物時對接時間與距離關系曲線,其余曲線存在凸起是由于出現障礙物造成的。總體上,對接時間基本上與距離成正比,表明該對接方法具有良好的魯棒性和可行性。
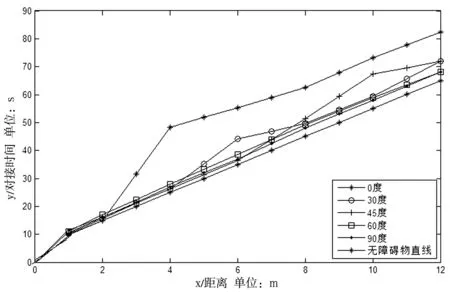
圖9 對接時間與距離和角度關系
為了檢驗該對接方法的實用性。本實驗選擇大小為40cm*50cm、運行速度為20cm/s的輪式服務機器人,在面積為18m*18m的庭院環境中,設置如圖2所示的障礙物進行試驗。
根據上述仿真結果,蟻群算法參數設置為:m=50,n=60,Q=1,α=1,β=1,ρ=1,RFID定位采用均值法來提高定位準確性。共進行50次試驗,成功對接50次,達到預期期望。說明該對接方法具有高成功率。
4 結論
本文提出的基于有源RFID遠距離定位導航、電磁傳感器和九軸傳感器信息融合技術的近距離對接以及限位開關反饋對接狀態的自主充電對接控制方法,可適應室外多變的惡劣環境。在室外多變環境下,可以很好解決庭院服務機器人自主充電對接成功率低、成本高、穩定性差等問題。通過仿真運行效果驗證該自主充電對接方法的可行性,在多次試驗中,成功實現了機器人在室外環境下自主充電對接,具有良好的成功率和穩定性,仿真和實際運行表明該對接方法滿足室外庭院服務機器人自主充電對接設計需求。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15