井下超聲流量計的誤差分析
2019-09-03 10:18:18林龍貴
中小企業(yè)管理與科技 2019年21期
林龍貴
(貴州航天控制技術有限公司,貴陽550009)
1 引言
在貴州航天控制技術有限公司的井下超聲流量計開發(fā)成功之前,油田使用的流量計主要由浮子式、渦輪式、電磁式等幾種原理制造的產(chǎn)品,由于受井內(nèi)原油、泥沙和液體黏度的影響,這些流量計的測試精度和可靠性都較差。井下超聲流量計從原理上解決了粘度法測定聚合物流量的測試問題。
2 隨機誤差分析
隨機誤差是產(chǎn)品在相同條件下,多次重復測量同一物理量時,誤差值呈無規(guī)律變化的一種誤差,隨機誤差不能用實驗方法消除,也不能修正,只能依靠統(tǒng)計規(guī)律了解其分布特性[1]。
2.1 流量微分方程
流量公式:

得全微分方程:
式中:
a0、a1、a2、a3——流量標定系數(shù),(無量綱);
T——超聲波傳播0.2m 所用的時間,(μs);
Δ?——超聲波在順流、逆流中傳播0.2m 產(chǎn)生的相位差。
在式(2)中,由于dΔ? 和dT 的變化是隨機的(統(tǒng)計符合正態(tài)分布),所以兩部分的誤差取絕對值之和。
2.2 隨機誤差計算
對測試的數(shù)據(jù)進行統(tǒng)計后,得出了在同一條件下的流量測試的原始數(shù)據(jù),其傳播時間“T”隨機變化dT=1~2μs,相位“Δ?”隨機變化dΔ?=10~20 個A/D 采集位,由于“T”和“Δ?”的隨機變化,導致了在同一條件下的流量Q 的隨機變化。
在以下的誤差計算中,設T=134μs(多數(shù)儀器測試的時間“T”為130μs-140μs=134μs),dT=1μs,dΔ?=10(針對多數(shù)儀器的dT、dΔ? 的變化范圍),帶入式(2)得:
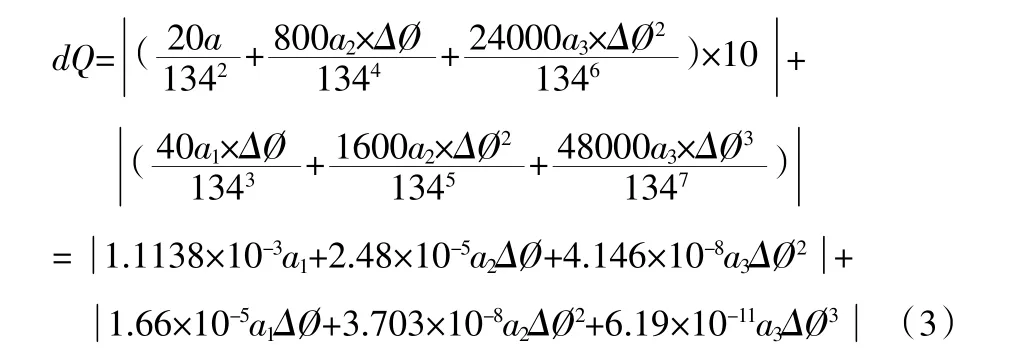
式(3)即為隨機誤差估算公式。
3“相位法”誤差分析
3.1 原理誤差分析
在實際測試中,如果水溫較高、壓力較大,則聲速“c”變大、時間“T”變小;又根據(jù)“可知,“”,此式說明流量Q 的自變量“不受聲速“c”的影響;但在相位法測試中,儀器只測試其相位“Δ?”隨聲速“c”的變化(原理上“Δ?”與“c2”成反比,“T2”成正比),忽略其時間“T”隨聲速“c”的變化,從而使“”與聲速“c”成反比,進而使Q 流量與聲速“c2”成反比,這是相位法測試中產(chǎn)生的原理誤差,即在高溫、高壓環(huán)境中實測的流量Q 會比真實流量小(即Q實測≤Q真值)。
3.2 原理誤差估算
在誤差估算中,取時間T2=1000(這是相位法計算中給定的值),聲速c 從1480~1555m/s,即水溫從20~70℃時聲速的變化(沒有考慮壓力對聲速c 的影響)。則:
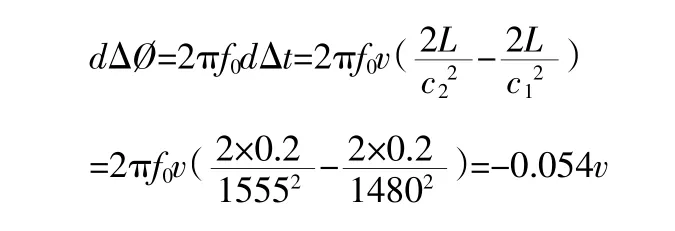
將dΔ? 變成A/D 采集值:
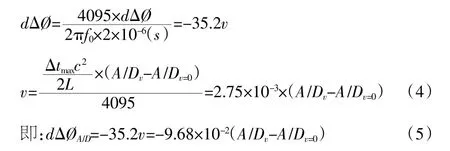
式(4)(5)中:
dΔ?A/D——dΔ? 的A/D 采集值;
A/Dv=0——流速為“0”時的A/D 采集值;
A/Dv——流速為“v”時的A/D 采集值;當v=0 時,A/Dv=A/Dv=0。
在式(8)中,Δt 取2μs(即2μs 所產(chǎn)生的相位的A/Dv采集值為4095),c 取1500m/s,式(5)中的“-”號表示當聲速“c”變大時,相位的A/D 采集值變小,即實測流量變小。
又根據(jù)相位法求流量的公式:

得相位法誤差公式:

4“相位-時間法”誤差分析
根據(jù)式(1),考慮到Δ? 和“T”的綜合影響,求全微分方程為:
此式與式(2)的區(qū)別在于沒有絕對值符號,這給兩部分誤差的相互抵消帶來了可能。
當聲速“c”從1480m/s 變到1555m/s 時,dΔ?A/D(max)的表達式和式(5)一樣,即:dΔ?A/D=-35.2v=-9.68×10-2(A/Dv-A/Dv=0);

在式(8)中,取T=134μs,結合上兩式得:

式(9)即為“相位-時間法”在聲速“c”從1480m/s 變到1555m/s 時的誤差估算公式。
5 誤差的驗證
5.1 隨機誤差估算的驗證
統(tǒng)計出04A057 號儀器的相位Δ?max=800,帶入式(3)得:

對04A057 號儀器的標定(標定精度為1.74%)得:
a1=126.58903,a2=8.71896,a3=-5.56843 代入式(10)得:dQ100=0.166+1.71=1.876(m3/d),即隨機相對誤差=1.88%。
在隨機誤差估算中,流量誤差的產(chǎn)生由兩部分組成:即由“dΔ?”產(chǎn)生的相位測試誤差和由“dT”產(chǎn)生的時間測試誤差之和。從A-100m3/d、A-200m3/d、A-300m3/d 的標定數(shù)據(jù)看:相位測試誤差的絕對值比較小(均在1m3/d 以下)、而時間測試誤差的絕對值隨量程的增大而增大,相對誤差之和隨量程的增大而減小,但最大不大于3%(F·S)。
根據(jù)誤差分配原則+,在溫度、壓力變化不大的情況下,采用相位法(x 法)克服了“dT”的影響,即排除了時間測試誤差,所以更容易標檢合格。
以上隨機誤差的大小依賴于儀器的測試精度和換能器的穩(wěn)定度。
根據(jù)誤差理論,該隨機誤差遵循正態(tài)分布,并且可針對具體的流量臺階的多次測試數(shù)據(jù)計算出特定流量條件下的標準偏差“σ”及精密度指數(shù)“h”。由于隨機誤差的概率密度分布函數(shù)計算需要依靠大量的統(tǒng)計數(shù)據(jù)才能保證其準確性,統(tǒng)計和計算的工作量大,故忽略此環(huán)節(jié)。
5.2 相位法誤差估算的驗證
以下驗證中的方程形式為:Q=a3x3+a2x2+a1x+a0,其中x=Δ?/1000,Δ? 為相位的“A/D”采集值(即Δ?=A/Dv)。
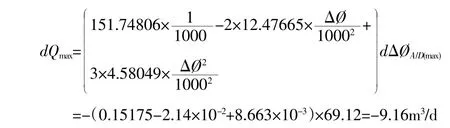
對03A052 號儀器進行相位標定得實際擬合方程:

取A/Dv=794(實測最大值),A/Dv=0=80(實測零位),則由式(5)得:dΔ?A/D(max)=-9.68×10-2×714=69.12,將dΔ?A/D(max)代入式(7)得:
即聲速在1480~1555m/s 時產(chǎn)生的相對誤差為:
從上看出,當聲速“c”從1480m/s 變到1555m/s(即水溫從20℃變到70℃)時,相同的實際流量,測試時可差10%左右,反映到實際生產(chǎn)過程中,超差的儀器大部分出現(xiàn)在水溫變化較大的時候。
6 結論
依據(jù)對流量計存在的隨機誤差、“相位法”誤差和“相位-時間法”誤差的分析結果,結合流量計目前的技術水平,可以認為:
①隨機誤差是暫時無法消除的(誤差一般在2%~4%左右),它主要由換能器決定,這也是造成流量標定精度較高、而檢定精度較低;或流量標定精度較低、而檢定精度較高的主要原因;
②“相位法”誤差屬于原理性誤差。當工作環(huán)境變化較大時會產(chǎn)生較大的誤差,如果考慮壓力的影響,則誤差將會更大;
③“相位-時間法”誤差也屬于原理性誤差。主要由電路產(chǎn)生的相位零位引起,因為相位零位是流速=0m/s 時的相位,由此看見,從原理上就把相位分成了兩部分:固定相位,和流速相位,相位本來隨聲速“”變化,樣這一來,為常數(shù)的“固定相位”和“流速相位”一起變成了自變量。目前,生產(chǎn)的流量計的設計零相位均在70~150 個A/D 值左右,所以由于零相位帶來的誤差均在2m3/d 左右。
消除“相位-時間法”誤差的辦法是在擬合方程時減去零相位,這一點在以后的計算中可以進一步完善。
綜上所述,可以得出兩條結論:
第一,在今后的流量標檢中,只能采用“相位-時間法”;第二,隨機誤差遵循正態(tài)分布,且主要受測試時間“”的影響,所以,在儀器標檢超差(超差幅度為:4%以內(nèi))的情況下,可以將上下?lián)Q能器對換后重新標檢,但超差大于4%時要另找其他的原因。
