太陽能飛行器能源晝夜閉環仿真分析
2019-09-05 12:27:16朱炳杰楊宇丹楊希祥
宇航學報 2019年8期
朱炳杰,楊宇丹,楊希祥,郭 正
(國防科技大學空天科學學院,長沙 410073)
0 引 言
目前,全球能源短缺、環境污染和溫室效應等問題亟需解決,開發新的清潔能源將是未來發展趨勢。基于這一認識,世界各國對可再生能源和持續性能源的開發和應用研究都投入了前所未有的熱情和精力。而太陽能則被認為是未來最可靠的清潔能源,使用太陽能為飛行器提供能源將有可能大幅度提高飛行器的續航能力,這也為可再生能源的應用開拓了一個新的領域。此外,對于臨近空間太陽能飛行器而言,通過攜帶不同功能及分布式結構一體化載荷,有潛力成為一個理想的通信中繼、對地觀測、預警探測平臺[1],將是人類信息獲取和信息對抗的有力拓展。
瑞士的Noth[2]完整地介紹了一套全新的太陽能飛行器總體設計方法,該方法通過近似建模將所有的設計參數都表示為與飛行器質量有關的函數,最終求解一個方程就可以得到飛行器總質量,并得到其它一系列設計參數,通過這種方法,省去了迭代過程,模型之間的關系更加清晰明確。烏克蘭的Sineglazov等[3]采用Noth提出的總體設計方法,對太陽能飛行器能源系統進行了設計。文獻[4-5]從傳統飛行器設計的升重平衡、推阻平衡等要求出發,根據能量獲取與利用等相互關系,提出了一種以能量為核心的太陽能飛行器總體設計方法。文獻[2-3]主要集中于太陽能飛行器的總體設計,未對能源閉環進行考慮。文獻[4-5]則較少考慮太陽能飛行器飛行過程中航跡設計、姿態變化、能源分配策略等對能源系統晝夜閉環的影響。本文在上述研究方法和成果中總結經驗,對太陽能飛行器能源系統的晝夜閉環展開針對性研究。此外,葉川等[6]通過理論推導獲得了臨近空間長航時太陽能飛行器動導數計算公式,本文參照其計算方法獲取太陽能飛行器的氣動參數。
太陽能飛行器的長航時飛行主要取決于能源系統的晝夜閉環,本文著重對太陽能飛行器能源晝夜閉環機理進行分析,并建立能源晝夜閉環預測模型,旨在系統地解決太陽能飛行器飛行過程中能源系統閉環匹配耦合的問題,形成一套面向太陽能應用的能源閉環預測模型,為長航時太陽能飛行器能源系統的研制和可靠飛行奠定基礎。
1 太陽能飛行器工作原理
太陽能飛行器主要使用太陽電池板獲取的能源為飛行器提供能量。白天,太陽電池板接收太陽輻照,將光能轉換成電能,供飛行器飛行,并將多余的能量存儲在儲能電池中;夜間,由儲能電池為飛行器提供能源,直至第二天早上開始新的循環[7]。太陽能飛行器的工作原理如圖1所示。
2 典型工況分析
太陽能飛行器能量關系與具體的飛行剖面有關,圖2是太陽能飛行器的典型飛行剖面[8],白天與夜間主要的飛行高度分別設置為20 km和12 km。
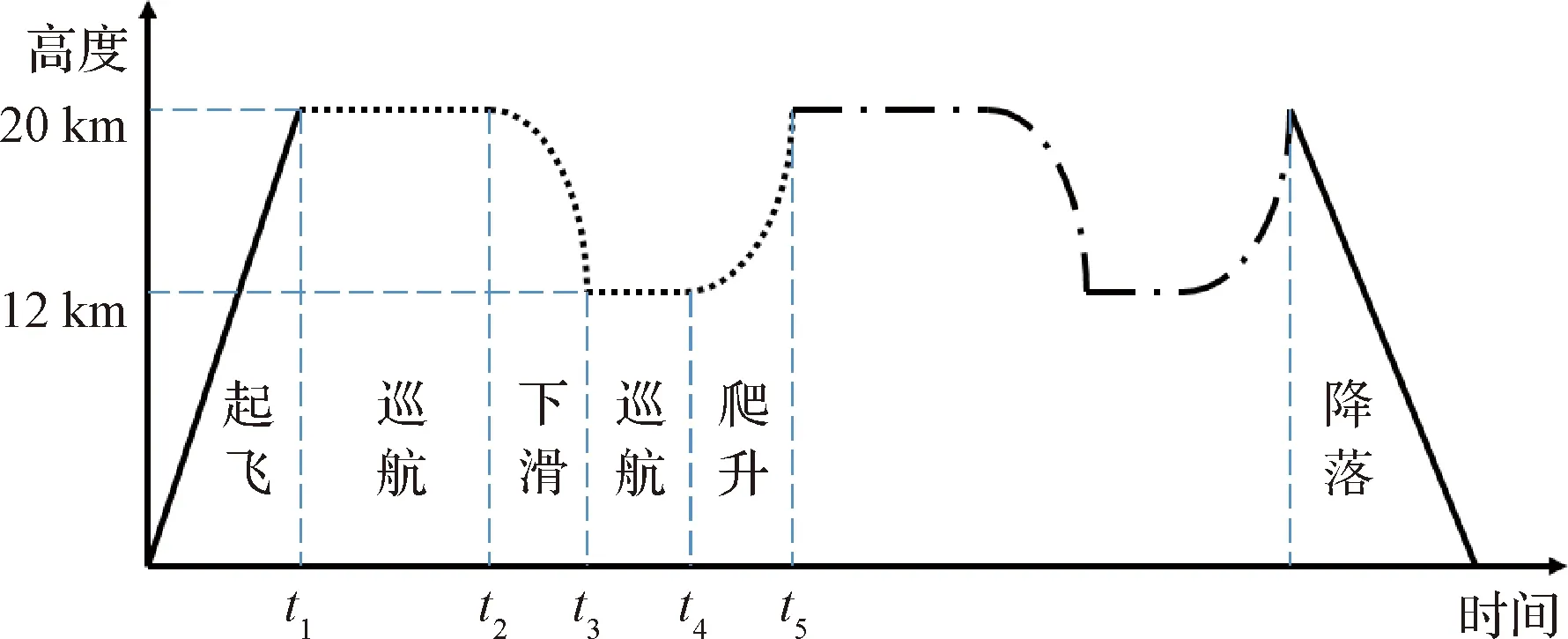
圖2 飛行器典型飛行剖面Fig.2 The typical flight profile of solar powered aircraft
太陽能飛行器飛行剖面主要分為起飛―爬升、跨晝夜飛行和下降著陸3個階段。而太陽能飛行器長期駐空飛行的主要階段是跨晝夜飛行,這一階段又分為白天巡航、下滑、夜間巡航和爬升四部分,本文主要研究討論這一階段的能量關系。
t1~t2時間段內,飛行器在20 km高度巡航,太陽能電池板獲取電能,一部分用于飛行器消耗,另一部分存儲在儲能電池中。
t2~t3時間段內,為節約能量飛行器以最優航跡下滑,飛行器消耗儲能電池的電能。
t3~t4時間段內,飛行器在12 km高度進行夜間巡航,消耗儲能電池存儲的能量。
t4~t5時間段內,為了能夠在白天獲取更多的能量,飛行器進行爬升,儲能電池和太陽能電池同時為飛行器提供能量。
以上各個時間點的具體值將依靠能源系統的閉環運行進行設定。
3 能源系統建模分析
3.1 能源獲取建模
到達地球表面的太陽輻照強度受很多因素影響,包括太陽高度角、大氣質量、地理緯度、日照時間、海拔高度等[9]。一天中的任一時刻,太陽直接輻照強度為:
(sinφsinδ+cosφcosδcosω)
(1)

(2)
式中:n為一年中的第n天。
太陽與飛行器空間位置如圖3所示,太陽光線指向向量與天頂的夾角定義為天頂角,用θZ表示;太陽光線與地平面的夾角定義為太陽高度角,用αs表示;太陽光線在地面的投影線與南北方向線之間的夾角為太陽方位角,用γs表示;C為太陽能飛行器的俯仰角。

圖3 太陽與太陽能飛行器空間位置示意圖Fig.3 Spatial location of the Sun and the aircraft
太陽高度角αs可以表示為:
sinαs=sinφsinδ+cosφcosδcosω
(3)
根據太陽高度角與時角之間的關系可以計算日出日落時間,進而可以得到全天太陽輻照強度。另外,還要考慮海拔高度及大氣透射率的影響,將大氣透射率視為衰減因子,可表示為[10]:
τ=0.56×(exp(-0.65m)+exp(-0.095m))
(4)
式中:m為無量綱量,是大氣質量系數,表示大氣對地球表面接收太陽光的影響程度,可用下式進行計算:
[(288-0.0065h)/288]·5.256
(5)
式中:h為海拔高度。
太陽能電池板鋪裝在彎曲的機翼表面,如果近似為平面進行計算,則存在誤差。為了減小誤差,可在飛行器上建立坐標系,將太陽能電池向三個坐標平面進行投影,分別計算每個投影面的太陽能電池發電功率,進而得到總功率。
假定初始狀態為飛行器機頭朝向正南方,即X軸指向正南方向,Y軸指向天頂,Z軸指向正西方向,即如圖3中俯仰角C為0 °的情況。當飛行器沒有任何姿態變化,即保持初始狀態時,XOY,XOZ,YOZ三個平面的太陽入射角如下所示[11]:
θXOY=arccos(sinθZsinγs)
(6)
θXOZ=θZ=90°-αs
(7)
θYOZ=arccos(sinθZcosγs)
(8)
當飛行器俯仰或者偏航時,可以根據坐標系之間的轉換關系求得新的太陽入射角。
當飛行器俯仰時,相當于繞機體Z軸轉動,轉動角度為C,按照坐標系轉動規律,可以得到如下關系:
(9)
式中:θ′XOY,θ′XOZ,θ′YOZ分別為俯仰姿態變化之后XOY,XOZ,YOZ平面的太陽入射角。M3(C)為繞Z軸轉動的方向余弦陣。可以計算得到:
θ′XOY=arccos(sinθZsinγs)
(10)
θ′XOZ=arccos(cosθZcosC-sinθZcosγssinC)
(11)
θ′YOZ=arccos(cosθZsinC+sinθZcosγscosC)
(12)
結合太陽電池光電轉化效率、最大功率點跟蹤效率(Maximum power point tracking,MPPT)以及各投影面的面積可以得到太陽電池發電功率為:
Psolar=IsolarτScosθηsolarηMPPT(1-δtemp)(1-δcircuit)
(13)
式中:Psolar為太陽電池陣的實時發電功率,Isolar為太陽輻照強度,τ為大氣透射率,S為太陽電池鋪裝面積,θ為太陽入射角,ηsolar為太陽電池光電轉化效率,取18 %,ηMPPT為MPPT效率,取0.95;δtemp為高空溫度升高導致的功率損失率,取0.05;δcircuit為系統電路損失率,取0.05。
3.2 能量消耗建模分析
3.2.1白天巡航階段耗能分析
這個階段主要是穩定水平飛行,飛行器的能量消耗主要來自太陽電池的直接供給,傍晚時當獲取太陽能的功率與巡航功率相等之后,消耗的能量有一部分來源于儲能電池。此時的平飛功率為:
Plev,d=Tv
(14)
式中:T為飛行器的推力,v為飛行器的空速。
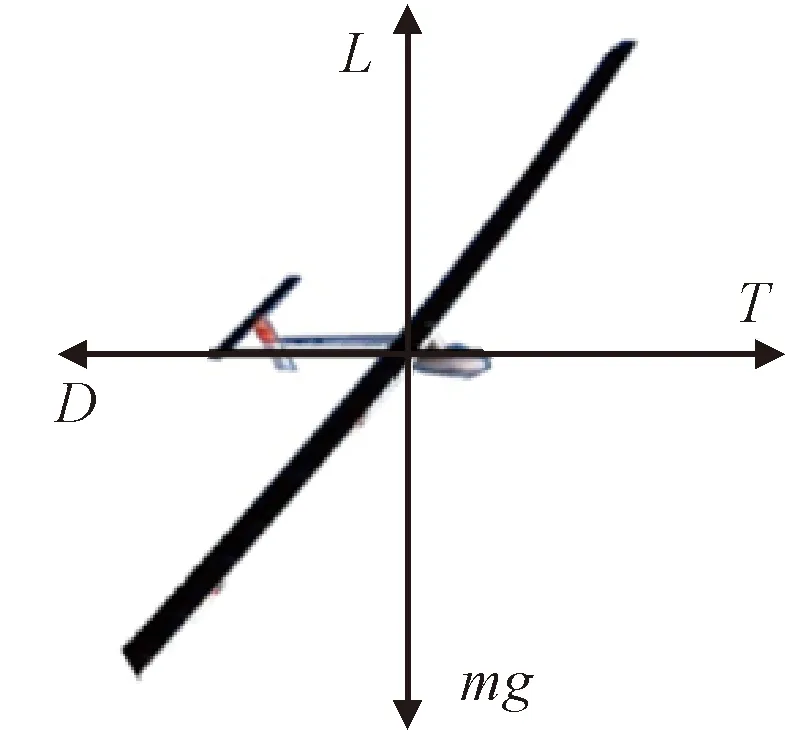
圖4 飛行器受力示意圖Fig.4 Applied forces for the aircraft in cruising
飛行器在平飛過程中需滿足升重平衡和推阻平衡[8]:
(15)
(16)
式中:m為飛行器的總質量;g為重力加速度,這里取為定值;S為飛行器機翼面積;ρ為大氣密度;CL,CD分別為升力系數和阻力系數,二者關系可通過下式表示:
(17)
式中:AR是展弦比;e是Osward系數;CD,0為寄生阻力系數,一般取值為0.033;CL的取值與攻角成正比。
由式(15)可以得到速度v的表達式[2]:
(18)
將式(16)和式(18)代入式(14),可得平飛功率的表達式:
(19)
式中:大氣密度ρ隨著海拔高度的變化而發生改變,當11.0191 km≤h≤20.0631 km時,大氣密度可由下式得出[12]:
(20)
式中:ρSL為海平面大氣密度,ρSL=1.225 kg/m3。
太陽能飛行器除了螺旋槳提供推力需要耗能外,航電設備和任務載荷也會消耗能量,白天巡航時消耗的能量可以表示為:
(21)
式中:ηmot為電機的效率,ηprl為螺旋槳的效率,Pav為航電系統功率需求,Ppld為有效載荷的功率需求,ηbec為DC/DC降壓器的轉換效率,t1是巡航開始時間,t2為巡航結束開始下滑的時間。
3.2.2下滑階段耗能分析
太陽能飛行器的夜間能量主要由儲能電池供應,僅依靠重力滑翔是一種減少飛行器夜間消耗功率的有效方法,可以降低夜間儲能電池的能量消耗[13-14]。為減少飛行器需用功率,節約能量,夜間采用這種模式飛行,此時主要關注飛行器飛行過程中的宏觀變化,因此可以將飛行器簡化為質點進行研究,并且假設風向不發生變化,始終沿著水平方向,受力分析如圖5所示。
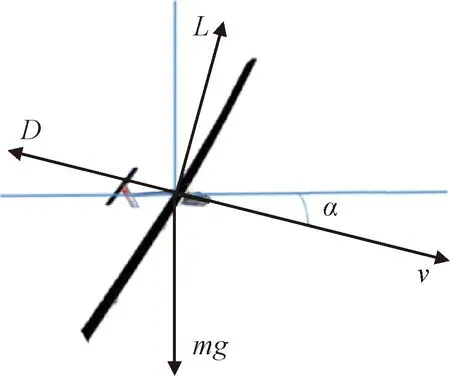
圖5 滑翔受力示意圖Fig.5 Applied forces for the aircraft in gliding
此時不考慮風速的影響,假設下滑攻角α不隨時間變化,只考慮速度變化,在沿著速度方向和垂直于速度方向進行分析,則有:
L=mgcosα
(22)
(23)
將式(22)代入式(23),有:
(24)
另外,太陽能飛行器飛行高度與速度之間的關系為:
(25)
根據式(24)和式(25),可以得到速度v以及飛行高度h隨著時間的變化關系:
(26)
(27)
根據式(27),通過計算可以得到滑翔時間隨攻角變化的曲線,從中找到最優下滑攻角,并以此攻角下滑,以達到夜間飛行消耗能量最低的目的。
此時,飛行器消耗的功率主要用于航電系統與有效載荷,消耗的能量可以表示為:
(28)
式中:t3為滑翔到指定高度開始夜間巡航的時間。
3.2.3夜間巡航階段耗能分析
太陽能飛行器夜間飛行消耗的能量全部來源于儲能電池。為了使夜間消耗能量最少,可對第3.2.2節中所述的滑翔時間進行優化。考慮到安全性等因素,滑翔到指定高度后,需要在這一高度進行巡航或者直接爬升,由于爬升消耗功率要比巡航消耗的功率大,所以將爬升階段設置在日出之后,滑翔到指定高度后開始夜間巡航。夜間巡航同白天巡航階段一樣,通過推阻平衡和升重平衡可以得到巡航功率:
(29)
與白天巡航不同的是飛行高度,在式(29)中表現為大氣密度ρ,根據式(20)可以得到夜間巡航高度下的大氣密度,進而可以求得夜間巡航功率。這一階段太陽能飛行器所消耗的能量可以表達為:
(30)
式中:t4為爬升開始的時間。
3.2.4爬升階段耗能分析
上午爬升階段所需功率較大,所以選擇在日出之后開始爬升,這樣消耗的能量一部分由太陽電池供應,對儲能電池的要求相對較小。
不考慮風速的影響,假設爬升過程中飛行器攻角和俯仰角始終保持不變,則受力分析如圖6所示。
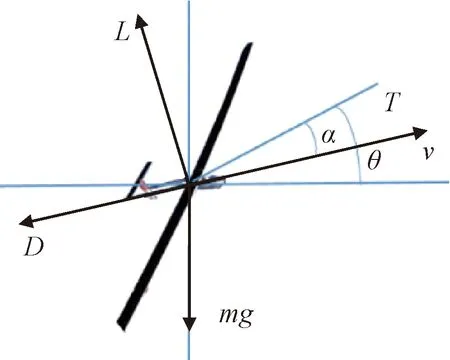
圖6 爬升階段受力分析Fig.6 Applied forces for the aircraft in climbing
沿著速度方向和垂直于速度方向分析,分別有如下關系:
(31)
L=mgcos(θ-α)
(32)
式中:α為攻角,θ為俯仰角。
太陽能飛行器飛行高度與速度之間的關系為:
(33)
爬升功率為:
Pclimb=Tv
(34)
爬升階段所需總能量為:
(35)
3.3 能量存儲建模
根據對白天巡航―下滑―夜間巡航―爬升各個階段的分析,通過每一階段獲取能量與消耗能量之間的關系對比,可以進一步得到儲能電池在各階段的儲能情況:
(36)
式中:P為各階段太陽能飛行器全機消耗功率。
為了能夠持續飛行,儲能電池存儲的能量要滿足夜間飛行階段以及爬升階段的需求,直至再次充電[15]。儲能電池根據太陽電池產能以及飛行器耗能的情況,不斷地充放電,滿足太陽能飛行器飛行需求,達到能源晝夜閉環以及跨晝夜持續飛行的目的。
日出到日落整個時間段內只發生爬升和白天巡航兩個階段,根據一天的日照時間以及爬升階段需要的時間可以得到白天巡航時間。此時不同爬升攻角下,日出到日落時間段內太陽能存儲能量為:
ΔE=E-E1-E4
(37)
式中:E為全天獲取太陽能,E1為白天巡航消耗能量,E4為爬升消耗能量,得到的ΔE即日照時間內儲能電池可以存儲的能量。
在爬升階段,姿態角發生變化,太陽能電池板接收的太陽輻照強度也會隨著俯仰角的變化而變化,考慮不同俯仰角和攻角的情況下一天內太陽電池累積獲取的能量以及日照時間內飛行器消耗的能量總和,可以以日照時間內能量存儲最多為目標對爬升階段進行優化。
結合方程(36)、(37),太陽電池的實時發電,一部分供應飛行器飛行,另一部分將能量存儲在儲能電池中。通過整體規劃飛行姿態,達到白天儲能電池獲取能量最多的目標。設置:
maxJ=ΔE
(38)
對應于方程(36)、(37)、(38)進行優化仿真。
首先假設飛行器受力平衡,飛行保持勻速,此時螺旋槳提供的推力最小,則沿著速度方向有如下關系:
T=D+mgsin(θ-α)
(39)
式中:α為攻角,θ為俯仰角。
垂直于速度方向受力同式(32)所示,由式(32)可得:
(40)
結合式(32)和式(39),并根據功率表達式可以得到爬升功率為:
(41)
此時考慮極限情況,為取得最優的爬升角度組合,只考慮爬升功率與角度的關系,將大氣密度看為常數,可以得到功率Pclimb與攻角α、俯仰角θ的變化關系。同樣,視大氣密度為常數,可以得到這種情況下近似的爬升時間:
(42)
通過計算可以得到白天存儲能量與攻角、俯仰角的關系,通過圖像可以得到能量存儲最大時的攻角與俯仰角,并以此角度進行爬升。
以上計算中都將大氣密度考慮為定值,未考慮海拔高度變化的影響,下面的計算中,將根據得到的最優角度組合θ0,α0來考慮海拔高度對爬升階段各參數的影響,這時速度不再保持不變,而是存在加速度。將θ0,α0代入到式(31)、(32)、(33)中,并且結合這三個式子可以得到:
(43)
根據式(43)可以得到海拔高度與時間的關系式,進而可以計算速度、推力、消耗功率與時間的關系。根據爬升起始高度可以得到白天巡航時間。
4 仿真分析
4.1 飛行器結構
參照Zephyr 7的相關數據,以及表1中相關參數對上述模型進行仿真。
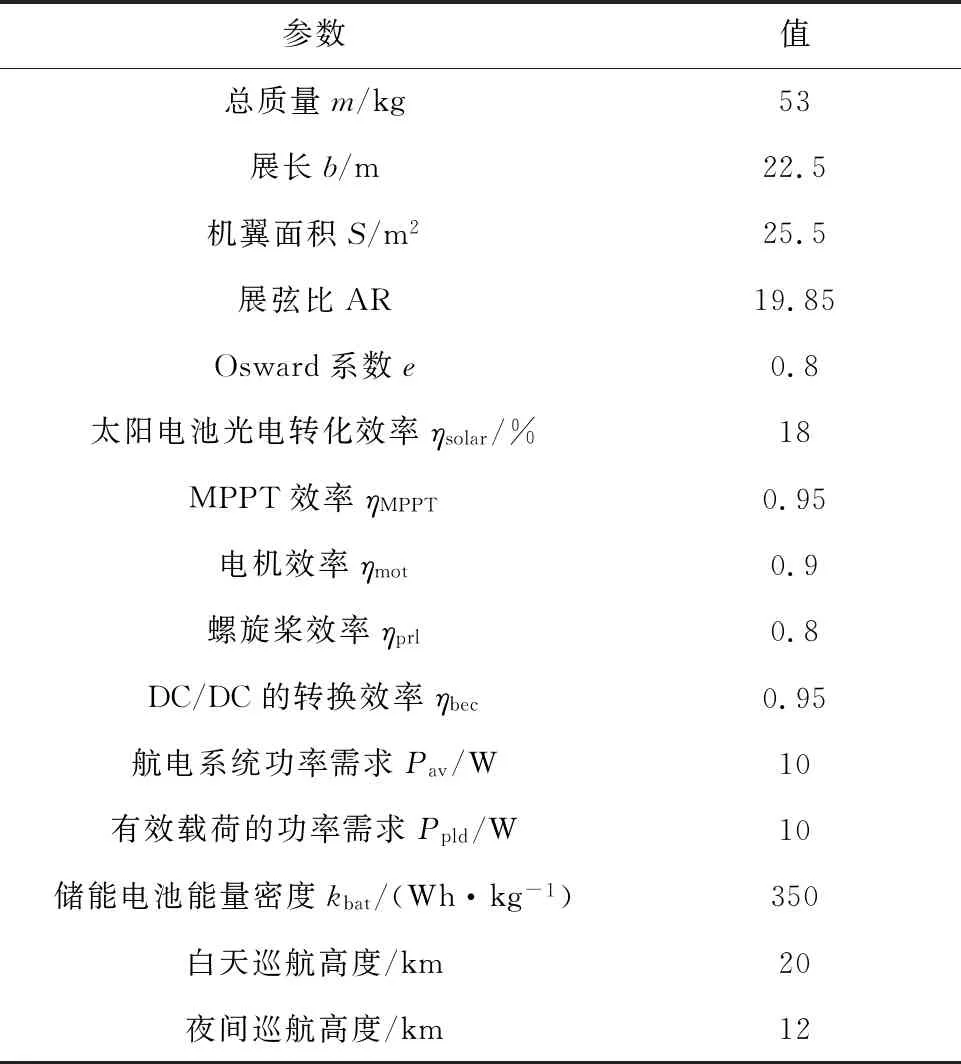
表1 太陽能飛行器參數Table 1 Parameters of solar powered aircraft
用于仿真的太陽能飛行器翼型選擇為FX63-100,平飛升力系數為0.78。儲能電池采用鋰硫的二次電池,0.2 C的充放條件下循環壽命超過50次,放電深度為90 %。
4.2 晝夜能源閉環優化分析
太陽能飛行器仿真飛行區域選擇為長沙地區(28°21′ N 113°E),由于冬至日全天獲能最少,這個日期比較具有代表性,所以選擇這一天進行計算。
4.2.1太陽電池獲能分析
冬至日時太陽能飛行器在長沙地區巡航過程中,當不發生姿態變化時,三個投影面內太陽能電池的輸出功率如圖7所示。
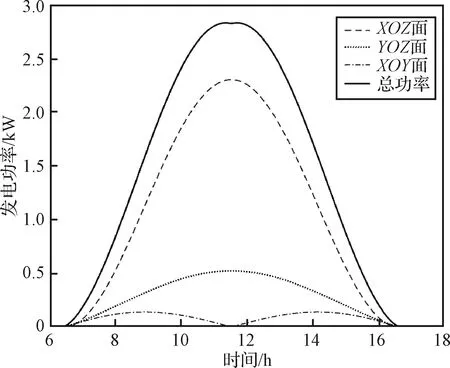
圖7 太陽能電池發電功率Fig.7 The solar cell power in the process of aircraft’s flight
4.2.2白天巡航階段能量關系
根據式(18)~(19)計算得到白天巡航階段平飛速度為24.36 m/s,平飛時推進系統消耗功率為489.92 W,而飛行器全機消耗功率為701.50 W。
4.2.3下滑階段能量關系
傍晚依靠重力下滑階段,飛行器只有有效載荷和航電設備消耗能量,其全機消耗功率為21.05 W,通過計算可以得到滑翔時間與攻角之間的關系圖像,如圖8所示。

圖8 滑翔時間與攻角的關系Fig.8 The relationship between gliding cycle and angle of attack
從圖8可以看出,當攻角為2.2°時,滑翔時間最長,可以達到6305 s,約1.7514 h,此攻角小于翼型的失速攻角7°,所以符合條件。
4.2.4夜間巡航階段能量關系
根據式(18)和式(29)計算得到夜間巡航階段平飛速度為12.96 m/s,平飛時推進系統消耗功率為260.69 W,而飛行器全機消耗功率為383.12 W。
4.2.5爬升階段能量關系
結合產能和耗能,圖9是白天可以存儲在儲能電池中的能量隨著攻角和俯仰角的變化趨勢。
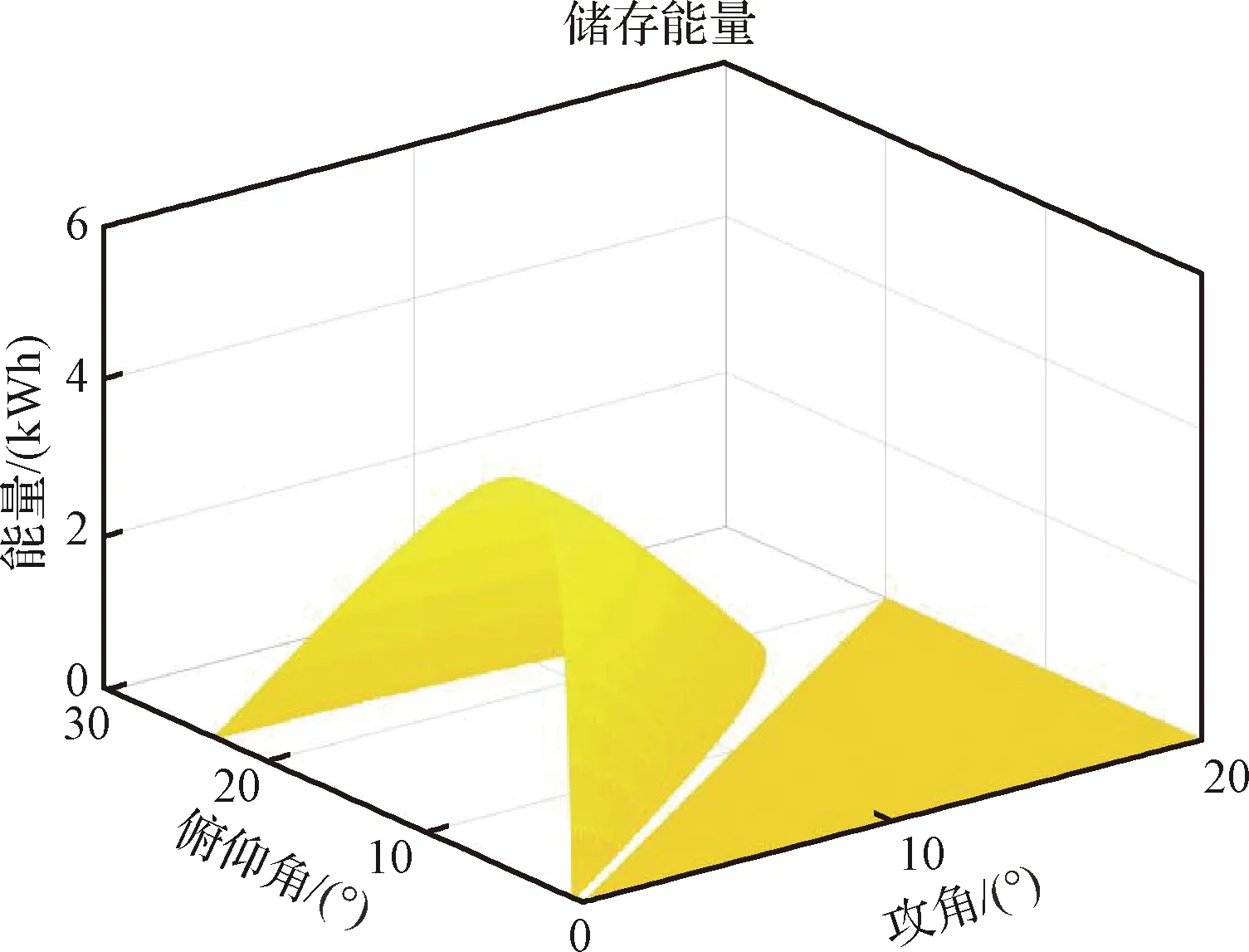
圖9 存儲能量與攻角、俯仰角的關系Fig.9 The relationship between energy storage, angle of attack and angle of pitch
根據圖9的變化趨勢可以找到存儲能量最大的一點對應的攻角和俯仰角。為了更加清楚地觀察存儲能量與攻角以及與俯仰角的關系,在圖10以及圖11中單獨表示出來。
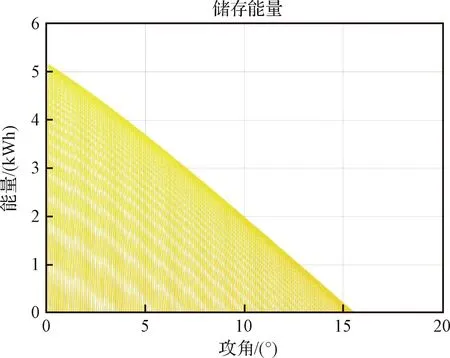
圖10 存儲能量與攻角的關系Fig.10 The relationship between energy storage and angle of attack
從圖10可以看出,存儲能量隨著攻角的增大而減小,在攻角為零時,存儲能量達到最大。圖11表示存儲能量與俯仰角之間的關系。
由圖11可知,當攻角為0°俯仰角為3.6°時,儲能電池存儲的能量最多,可以達 5.139 kWh。得到爬升俯仰角和攻角后,計算得到爬升時間約為7296 s,約2.0266 h。
4.2.6飛行器全天能量分析
通過以上計算,得到了太陽能飛行器各個飛行階段的時間、消耗功率、太陽電池發電功率以及獲取、消耗、存儲能量等有關參數,據此可以得到全天的功率關系。下面整體考慮全天的產能、耗能、儲能的情況,圖12是太陽能飛行器在冬至日全天太陽電池發電功率、太陽能飛行器消耗功率以及儲能電池放電功率的變化關系,全天的能量關系如表2所示。
根據全天能量關系可以發現,冬至日全天有能量剩余,可以達到能源晝夜閉環的目標。其他日期太陽電池獲取能量更多,更容易滿足能量閉環的要求。綜上所述,該模型可以達到能源晝夜閉環的目的,飛行器可以實現跨晝夜持續飛行。

表2 全天能量關系Table 2 The energy relation of solar powered aircraft in a day
5 結 論
本文從太陽能飛行器的典型飛行剖面著手,設置了不同太陽能飛行器晝夜飛行高度,討論了每個階段能量變化關系。在下滑階段,利用重力滑翔的方式節約飛行器耗能;在上升階段,分析了飛行器姿態變換對獲能及耗能的影響,以存儲能量最大值為優化目標,對能量模型進行優化設計;整體討論了飛行器全天的能量關系,對太陽能飛行器晝夜能源閉環模型進行了驗證分析。以Zephyr 7太陽能飛行器的結構參數為參照,通過模型設計與數值優化仿真,本文設計的能源系統可以實現能量晝夜閉環運行,為后續的飛行實踐提供了理論指導。