集散控制的智能精準投料控制系統設計
2019-09-10 06:22:15夏國清譚石堅陳華珍
現代信息科技 2019年2期
夏國清 譚石堅 陳華珍
摘 要:為了滿足當今水產精細化養殖中減少人力、精準投料及降低污染等市場需求,本文設計了一種基于微控制器STM32F103實現的智能精準投料控制系統。該系統首先采用基于STM32F103+W5500網絡通訊器的數據網關實現投料機終端與PC上位機通信;其次,采用基于STM32F103+HX711數模轉換器的投料機終端實現精準投料。為了實現系統的精準投料,本系統利用中值濾波和均值濾波獲取實時投喂重量,并通過二級閉環控制降低稱料誤差,從而達到對喂投重量的精準控制。實驗結果證明:本系統能夠集散控制多臺投料終端且運行穩定,能夠實現精準投料。
關鍵詞:智能投料系統;集散控制;PID控制;CAN通信;STM32F103;W5500;HX711
中圖分類號:TP29 文獻標識碼:A 文章編號:2096-4706(2019)02-0159-04
Abstract:In order to meet the market demand of reducing manpower,precise feeding and pollution in aquaculture,an intelligent precise feeding control system based on microcontroller STM32F103 was designed. Firstly,the data gateway based on STM32F103 + W5500 network communicator is used to realize the communication between feeder terminal and PC host computer;secondly,the feeder terminal based on STM32F103 + HX711 digital-to-analog converter is used to realize accurate feeding. In order to realize the accurate feeding of the system,the system uses median filter and mean filter to obtain the real-time feeding weight,and reduces the weighing error through two-stage closed-loop control,so as to achieve the accurate feeding weight control. The experimental results show that the system can control multiple feeding terminals in a distributed way and run steadily. It can achieve accurate feeding.
Keywords:intelligent feeding system;distributed control;PID control;CAN communication;STM32F103;W5500;HX711
0 引 言
隨著社會現代化生產的快速發展,物聯網技術迅速普及,養殖業對養殖的生產效率、科學管理、智能化等提出了更高的要求。目前大多數養殖業使用的是比較簡單的投料裝置系統,這些投料裝置對投料的精確度和投料時間控制遠不成熟,需要操作人員手動稱料并及時關注投料的情況[1],工作人員不能對這些投料機進行批量管理,管理效率較低,人力成本高,同時存在飼料浪費沉底造成水質污染[2]等問題。有鑒于此,本設計的目的在于克服現有技術的不足,提供一種智能投料系統,減少人工參與投料的程序,并實現精準投料。
1 系統總體設計
系統整體架構如圖1所示,總體硬件結構如圖2所示。為了實現養殖業中不同飼料或魚類的分類投喂管理和研究,本系統采用集散分組管理模式。系統由兩層網絡構成,其中上層是以太網,下層為CAN總線。
其控制思路如下:通過PC上位機軟件,設置好不同組別每天需要投喂的餐數和每餐時間、投喂量及投喂次數等,時間一到,自動下發命令給各組網關。網關接收到上位機的命令之后,轉發給該組下面的所有投料機終端。投料機終端接收到命令完成相應的動作。如果是投料命令,則控制電機撥料,把料下到秤料倉中,控制器根據稱重傳感器實時讀取重量,當重量接近目標重量時,再通過PID算法控制減速電機來控制下料量,以達到想要的精確度,當稱料完成后實施開倉投放飼料,飼料每餐會按設定次數分多次稱量并投放,其目的是使魚能夠充分吃完,盡可能使飼料不會沉底與垃圾混雜,造成浪費和污染。上位機和網關之間通過以太網TCP/IP協議通信,網關跟投料機終端通過CAN總線通信。投料機終端稱重完成則上報自己實際所秤的重量,網關保存投料機終端返回的重量,最后把所有的終端狀態和重量一起上報給上位機。上位機則把數據顯示在相應的功能區并保存到數據庫,供工作人員查看,同時上位機會將當前返回的重量與設定目標重量進行對比,計算出誤差并補償到下一餐投喂目標重量中,從而達到一天或多天投喂重量的精準控制。
2 系統控制算法與軟件設計
系統軟件由三部分構成:第一,PC端上位機控制軟件;第二,數據網關控制軟件;第三,投料機控制軟件。其中,PC端上位機控制軟件主要是根據用戶功能需求來設計業務流程及相應圖像界面,本文不再做具體介紹;數據網關控制軟件,實現上位機與投料機間命令及數據的交互;投料機控制軟件主要完成自動稱料與投料工作。由于上位機與數據網關采用TCP/IP通信,數據傳輸穩定。本文將重點介紹數據網關與投料機之間的CAN總線自定義通信方案及投料機成料精度控制方案。
2.1 CAN總線通信方案
每組數據網關要與該組N臺(本設計中N=24)投料機終端進行命令及數據的交互,CAN數據幀的格式設為標準幀格式,大小為8個字節,即每次可實現8個字節的數據發送或接收。其數據幀的格式定義如表1所示。每臺投料機設置固定的機器ID以便識別(本設計ID號的設置通過控制板上的8位撥碼開關設置0、1來組合成8位編碼);命令是上位機或網關對投料機的命令(本設計中的命令包括:開始稱料、獲取已稱料重量、開倉投料、停止稱料、獲取投料機狀態、調試等);投喂編號用于通信中確認命令或為第幾次投喂的命令或數據;重量為稱料重量;校驗碼主要用于數據幀的校驗,以確保數據傳輸的正確性[3]。
數據網關與投料機終端通訊規則為:
第一,數據網關與該組投料機終端采用CAN接收中斷實現數據的接收(該中斷優先級設置為較高級別),網關CAN過濾器設置能接收不同ID的數據幀,投料機CAN過濾器設置成只接收與自己ID號相同的數據幀;
第二,當數據網關向投料機終端發送命令時,投料機終端收到信息后需回發一個確認信息。如果數據網關在規定的時間內未收到投料機終端的確認信息,就進行第2次命令發送。如果還未得到回應,就向上位機報送該投料機狀態為不在線,以便管理員能及時了解情況并進行處理;
第三,投料機CAN接收中斷處理程序接收命令后,只保存當前命令及數據參數(以便不影響下個中斷的響應)后立即退出,投料機終端main主程序以無限輪詢的方式查詢當前命令狀態,并根據命令執行任務,投料機處理完命令所需執行的任務后,將主動上報結果。
網關在其下發的命令執行限定時間到達后,如發現有某個投料機未上報執行結果,就主動最多兩次向該投料機發送查詢結果命令,如果仍未得到回應,就向上位機報送該投料機狀態為不在線。
2.2 投料機稱料精度控制
投料機料倉由兩部分構成,分別為儲料倉和投料倉。減速電機通過轉動帶動撥料盤將料從儲料倉撥落到投料倉中,投料倉懸掛在稱重傳感器之上,控制器通過查詢傳感器檢測數據以判斷是否達到投喂目標重量。稱料的軟件控制流程如圖3所示。
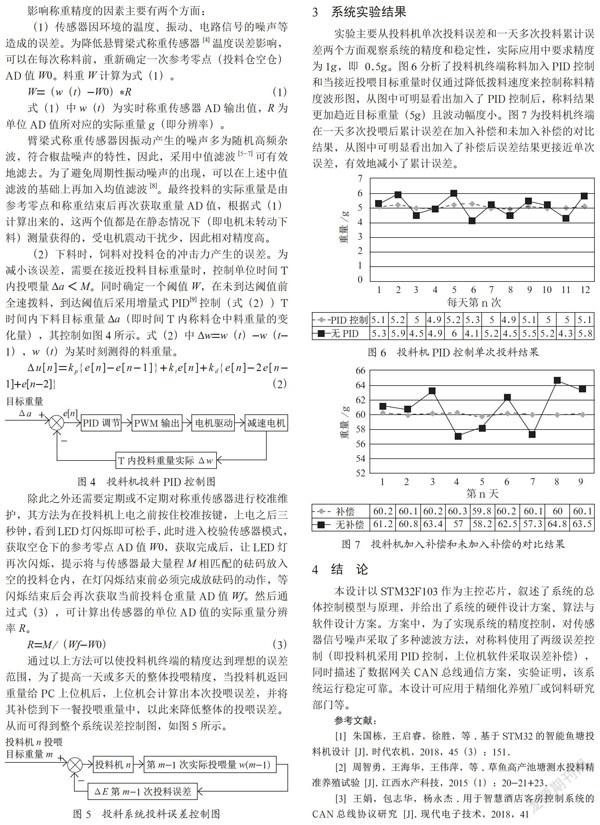
臂梁式稱重傳感器因振動產生的噪聲多為隨機高頻雜波,符合椒鹽噪聲的特性,因此,采用中值濾波[5-7]可有效地濾去。為了避免周期性振動噪聲的出現,可以在上述中值濾波的基礎上再加入均值濾波[8]。最終投料的實際重量是由參考零點和稱重結束后再次獲取重量AD值,根據式(1)計算出來的,這兩個值都是在靜態情況下(即電機未轉動下料)測量獲得的,受電機震動干擾少,因此相對精度高。
3 系統實驗結果
實驗主要從投料機單次投料誤差和一天多次投料累計誤差兩個方面觀察系統的精度和穩定性,實際應用中要求精度為1g,即 0.5g。圖6分析了投料機終端稱料加入PID控制和當接近投喂目標重量時僅通過降低撥料速度來控制稱料精度波形圖,從圖中可明顯看出加入了PID控制后,稱料結果更加趨近目標重量(5g)且波動幅度小。圖7為投料機終端在一天多次投喂后累計誤差在加入補償和未加入補償的對比結果,從圖中可明顯看出加入了補償后誤差結果更接近單次誤差,有效地減小了累計誤差。
4 結 論
本設計以STM32F103作為主控芯片,敘述了系統的總體控制模型與原理,并給出了系統的硬件設計方案、算法與軟件設計方案。方案中,為了實現系統的精度控制,對傳感器信號噪聲采取了多種濾波方法,對稱料使用了兩級誤差控制(即投料機采用PID控制,上位機軟件采取誤差補償),同時描述了數據網關CAN總線通信方案,實驗證明,該系統運行穩定可靠。本設計可應用于精細化養殖廠或飼料研究部門等。
參考文獻:
[1] 朱國棟,王啟睿,徐勝,等.基于STM32的智能魚塘投料機設計 [J].時代農機,2018,45(3):151.
[2] 周智勇,王海華,王偉萍,等.草魚高產池塘測水投料精準養殖試驗 [J].江西水產科技,2015(1):20-21+23.
[3] 王娟,包志華,楊永杰.用于智慧酒店客房控制系統的CAN總線協議研究 [J].現代電子技術,2018,41(20):104-106.
[4] 張玉葉.基于應變全橋的鐵質懸臂梁傳感器的設計與實現 [J].電子設計工程,2018,261(4):125-129.
[5] 托乎提努爾,張海龍,王杰,等.基于GPU的高速中值濾波算法 [J/OL].吉林大學學報(工學版):1-8 [2018-10-15].https://doi.org/10.13229/j.cnki.jdxbgxb20180050.
[6] 朱敏超,李莉莉.基于互補濾波的兩輪自平衡小車系統設計 [J].機械工程師,2016(4):86-88.
[7] 梁光勝,杜夢楠,周子豪,等.基于互補濾波的兩輪自平衡車姿態控制 [J].測控技術,2015,345(5):72-74.
[8] 錢德鵬.基于像素選擇的腦部磁共振圖像非局部均值濾波 [J].國外電子測量技術,2018,37(9):6-9.
[9] 林偉捷,黃唯佳,蔡劍卿.基于四元數互補濾波和PID控制算法的兩輪自平衡車系統設計 [J].軟件導刊,2016,15(6):80-82.
作者簡介:夏國清(1983-),男,安徽潛山人,講師,碩士,主要研究方向:智能控制、嵌入式系統、圖像處理與模式識別;譚石堅(1982-),男,廣東廣州人,講師,碩士,研究方向:嵌入式系統、計算機應用;陳華珍(1982-),女,江西樟樹人,講師,碩士,研究方向:網絡計算、多傳感器數據融合、智能科學。