基于遺傳算法對PID控制器參數的整定
2019-09-10 06:22:15高成龐家騰
現代信息科技 2019年2期
高成 龐家騰
摘 要:PID控制算法結構簡單,魯棒性強,它在工業控制中處于主導地位。如何設定PID控制器的控制參數,是PID實際應用過程中面臨的一大難題。本文通過利用基本遺傳算法去整定PID控制器參數,通過MATLAB仿真說明基本遺傳算法PID控制效果優于傳統方法的控制效果。
關鍵詞:PID控制;遺傳算法;MATLAB
中圖分類號:TP273;TP181 文獻標識碼:A 文章編號:2096-4706(2019)02-0171-02
Abstract:The PID control algorithm has simple structure and strong robustness. It plays a leading role in industrial control. How to set the control parameters of the PID controller is a major problem in the practical application of the PID controller. In this paper,the basic genetic algorithm is used to tune the parameters of the PID controller. The simulation of MATLAB shows that the control effect of the basic genetic algorithm is better than that of the traditional method.
Keywords:PID control;genetic algorithm;MATLAB
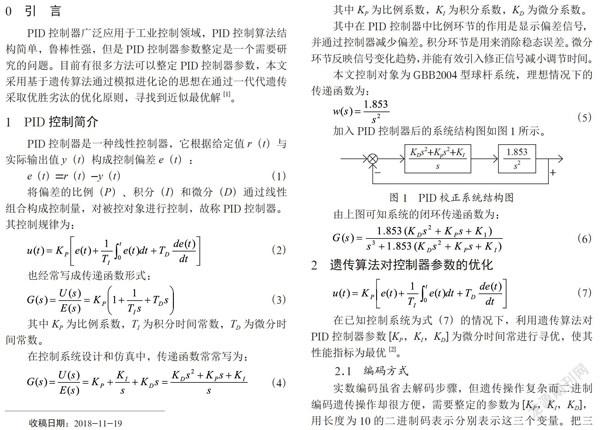
0 引 言
PID控制器廣泛應用于工業控制領域,PID控制算法結構簡單,魯棒性強,但是PID控制器參數整定是一個需要研究的問題。目前有很多方法可以整定PID控制器參數,本文采用基于遺傳算法通過模擬進化論的思想在通過一代代遺傳采取優勝劣汰的優化原則,尋找到近似最優解[1]。
2.4 變異
變異是以很小的概率Pm隨機的改變遺傳基因符號串的某一位的值。例如:X=0101100101,變異發生在第五位,遺傳因子由1變為0,變異后產生新的個體Xˊ=0101000101變異可使遺傳算法具有局部隨機搜索功能,又可維持種群多樣性,避免出現初期收斂問題[4]。
2.5 初始群體的生成
種群規模不太大,也不能太小,太大會增加計算量造成收斂時間變長,太小沒有足夠的規模算法性能差,本文隨機產生種群規模30的初始群體。
2.6 遺傳算法流程圖
遺傳算法流程圖如圖2所示。
3 仿真實驗結果
仿真對象為加入PID控制器的球桿系統模型,遺傳算法參數選擇群體規模M=30遺傳代數N=100,交叉概率Pc=0.6,變異概率Pm=0.001,取w1=0.999,w2=0.001,w3=2.0,w4=100。經過迭代計算,種群總體適應度提高,得到優化的PID控制器參數為KP=1.802,KI=0.245,KD=1.812。圖3是用湊式法整定PID參數仿真結果,圖4是采用遺傳算法整定參數仿真結果,從仿真圖可知遺傳算法整定的參數比湊式法整定的參數精確很多,超調量減小到了20%,調節時間減小到了3.25秒。仿真圖效果明顯優于湊式法。
4 結 論
通過對比分析可知基于遺傳算法整定的PID控制器參數更加準確,由仿真結果可以看出,該方法相對常規湊式方法更能使系統的動態特性和穩態特性得到較大的提高。但是仍有一定的超調量,調節時間也不是很理想,需要進一步改進算法。
參考文獻:
[1] 譚順學.基于遺傳算法的PID控制器參數優化研究 [J].大眾科技,2013,15(5):31-34.
[2] 牛菊梅.基于自適應遺傳算法的球桿系統控制器設計 [D].沈陽:東北大學;2010.
[3] 秦國經,任慶昌.基于遺傳算法尋優的PID控制與仿真 [J].中國西部科技,2011,10(11):12-13+10.
[4] 郭慶鼎,李蒙,郭威.PID控制器參數的遺傳算法優化設計 [J].沈陽工業大學學報,2000(1):31-33.
作者簡介:高成(1970.11-),男,漢族,內蒙古人,副院長,副教授,博士,研究方向:過程控制、機器人;龐家騰(1992.09-),男,漢族,河北邢臺人,研究生,研究方向:智能儀器及測控系統。