永磁同步電機(jī)無位置傳感器控制技術(shù)分析
2019-09-10 06:52:08陽小蘭
科海故事博覽·上旬刊 2019年2期
關(guān)鍵詞:永磁同步電機(jī)控制技術(shù)
陽小蘭
摘 要 永磁同步電機(jī)具有很好的應(yīng)用優(yōu)勢,這主要是其內(nèi)部轉(zhuǎn)子的位置能夠定位到,從而能夠?qū)τ来磐诫姍C(jī)的性能進(jìn)行提高。但是使用機(jī)械式傳感器相對(duì)來說不能夠很好的抵抗干擾,而且成本也較高,應(yīng)用無位置傳感器控制技術(shù)能夠彌補(bǔ)這一不足,對(duì)電機(jī)的廣泛使用有很好的推動(dòng)作用。鑒于此,本文分析了電機(jī)的無位置傳感器控制,電機(jī)主要是永磁同步式的,希望有參考意義。
關(guān)鍵詞 無位置傳感器 永磁同步電機(jī) 控制技術(shù)
自動(dòng)控制技術(shù)以及電子技術(shù)的不斷發(fā)展,使得電機(jī)的性能越來越高,交流變速系統(tǒng)控制得到了很好的應(yīng)用。在交流變速控制技術(shù)中,同步電機(jī)有較為明顯的優(yōu)點(diǎn),在一些大型的系統(tǒng)控制中具有很好的發(fā)展。永磁同步電機(jī)的無位置傳感器控制改變了機(jī)械式傳感控制,使得其應(yīng)用更加的可靠。
一、轉(zhuǎn)子的初始位置檢測
(一)預(yù)定位檢測方法
永磁同步電機(jī)能不能夠正常啟動(dòng)并且平穩(wěn)的運(yùn)行其轉(zhuǎn)子的初始位置檢測是十分關(guān)鍵的,只有轉(zhuǎn)子的初始位置檢測工作做好了,才能夠保證電機(jī)的啟動(dòng)轉(zhuǎn)矩,能夠有效的確保在啟動(dòng)的時(shí)候不會(huì)發(fā)生電機(jī)反轉(zhuǎn)的情況。使用預(yù)定位方法對(duì)轉(zhuǎn)子初始位置進(jìn)行檢測,主要就是在開始啟動(dòng)永磁同步電機(jī)之前,將恒定電壓矢量加到電機(jī)上,時(shí)間是定量,這樣電磁轉(zhuǎn)矩推動(dòng)著轉(zhuǎn)子轉(zhuǎn)到預(yù)定的地方。使用此方法進(jìn)行檢測,比較簡單,其運(yùn)算也不會(huì)太麻煩。
在將恒定電壓矢量加完之后,定子繞組中就會(huì)有合成電流矢量產(chǎn)生,然后就會(huì)有電磁轉(zhuǎn)矩,進(jìn)一步轉(zhuǎn)子就會(huì)進(jìn)行轉(zhuǎn)動(dòng)。使用這種預(yù)定位方法進(jìn)行檢測,通常情況下轉(zhuǎn)子預(yù)定位都能夠達(dá)到設(shè)置的目標(biāo)位置,但是也會(huì)有特殊情況存在,轉(zhuǎn)子無法到達(dá)目標(biāo)位置的情況是當(dāng)轉(zhuǎn)子的實(shí)際位置是在π或者是接近π時(shí)。針對(duì)于這種情況,使用逐次差值為120度的電壓矢量來依次進(jìn)行施加的方式,這樣就能夠使轉(zhuǎn)子逐漸的轉(zhuǎn)到目標(biāo)位置,通過這種方式,能夠使預(yù)定位方法檢測更加的具有可行性。不過使用這種方法進(jìn)行檢測有一定的缺陷,對(duì)轉(zhuǎn)子的位置進(jìn)行預(yù)定位的時(shí)間相對(duì)來說是比較長的,而且在過程中其轉(zhuǎn)子的位置是有可能會(huì)出現(xiàn)變動(dòng)的,因此其應(yīng)用是具有一定的約束性的。
(二)電壓脈沖矢量檢測方法
利用電壓脈沖矢量法來檢測轉(zhuǎn)子初始位置,主要是將六組同樣的電壓脈沖矢量加到定子繞組中,然后對(duì)定子電流進(jìn)行確定,以此來知道轉(zhuǎn)子所在的區(qū)間位置。其中施加的電壓脈沖矢量是基本非零矢量,這一過程中不使用脈沖發(fā)生器,也不用對(duì)開關(guān)進(jìn)行操作,這樣就不會(huì)影響到電路。脈沖矢量的添加形式如表1:
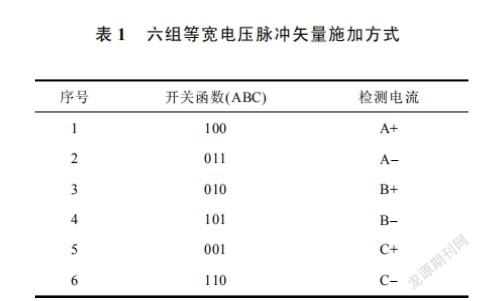
然后對(duì)六組的電流值進(jìn)行對(duì)比,這樣就能夠確定出轉(zhuǎn)子所在的區(qū)間位置。使用這種脈沖矢量法進(jìn)行檢測,是非常簡單的,但是相對(duì)來說檢測的位置誤差也較大,一般使用這種方法要結(jié)合其他方法一起,以保證檢測盡可能的準(zhǔn)確。
二、無位置傳感器控制技術(shù)中的零速和低速運(yùn)行控制
(一)開環(huán)V/F控制
永磁同步電機(jī)無位置傳感器控制技術(shù)中的開環(huán)控制相對(duì)來說成本比較低,而且不用通過檢測轉(zhuǎn)子的位置,就進(jìn)行簡單的計(jì)算就能夠?qū)崿F(xiàn),在水泵以及風(fēng)機(jī)等中較為實(shí)用。開環(huán)V/F控制是通過電壓頻率控制來實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的調(diào)節(jié)。這種控制技術(shù)的缺陷就是會(huì)發(fā)生不穩(wěn)定的振蕩情況,在控制的過程中,小范圍的電壓波動(dòng),就有可能會(huì)使定子的電流波動(dòng)變化較大,這樣就可能會(huì)使電機(jī)過電流。其開環(huán)控制的線形圖如圖1:

(二)I/F運(yùn)行控制
I/F運(yùn)行控制主要是利用電流閉環(huán)來使電流達(dá)到穩(wěn)定,從而實(shí)現(xiàn)電機(jī)的調(diào)速。這種控制可以對(duì)轉(zhuǎn)矩的電流進(jìn)行直接的控制,能夠使電機(jī)在運(yùn)行的過程中振蕩的情況得到解決。這種控制技術(shù)其轉(zhuǎn)速是處于開環(huán)的,利用閉環(huán)來控制電流,這樣就能夠?qū)﹄姶呸D(zhuǎn)矩進(jìn)行很好的控制。
三、無位置傳感器控制中的中高速運(yùn)行控制
永磁同步電機(jī)在以中高速進(jìn)行運(yùn)行的過程中,定子繞組的電流和反電動(dòng)勢是相對(duì)來說較為好檢測到的,估算轉(zhuǎn)子的位置可以利用磁鏈?zhǔn)噶縼韺?shí)現(xiàn),這種方法也比較簡單,但是這種方法對(duì)電機(jī)的相關(guān)參數(shù)特別是定子電阻會(huì)相對(duì)較為敏感。在定子繞組中,三次諧波反電動(dòng)勢分量較為顯著,測量電路如圖2:
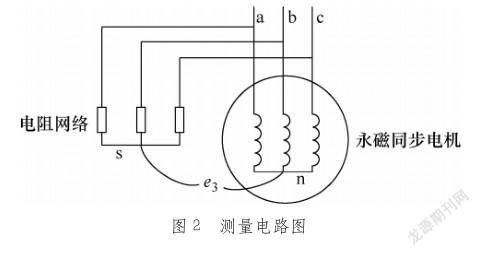
轉(zhuǎn)子的位置檢測可以通過三次諧波反電動(dòng)勢的過零點(diǎn)來體現(xiàn),還可以通過鎖相環(huán)的連續(xù)信號(hào)來檢測轉(zhuǎn)子的位置,將這兩種結(jié)合進(jìn)行使用,能夠使轉(zhuǎn)子位置估算的更加準(zhǔn)確。
四、無位置傳感器控制技術(shù)中的全速運(yùn)行控制
無位置傳感器控制中的全速運(yùn)行控制一般是結(jié)合中高速運(yùn)行和低速運(yùn)行控制,通常是混合方法的使用。像磁鏈估計(jì)法和I/F控制法進(jìn)行結(jié)合,就是在轉(zhuǎn)子的位置檢測之后,使用I/F控制電機(jī)起動(dòng)。達(dá)到定量的轉(zhuǎn)速的時(shí)候,在能夠明顯的計(jì)算到定子電流和反電動(dòng)勢時(shí),就使用磁鏈估計(jì)法來進(jìn)行無位置傳感器控制。這一過程中要注意開環(huán)轉(zhuǎn)到閉環(huán)控制的有效性,防止出現(xiàn)波動(dòng)的情況。
五、結(jié)束語
綜上所述,就可以看出來,無位置傳感器控制之所以能夠很好的對(duì)永磁同步電機(jī)的轉(zhuǎn)速進(jìn)行調(diào)節(jié),是因?yàn)槠淇刂萍夹g(shù)能夠比較準(zhǔn)確的檢測到轉(zhuǎn)子的位置,通過控制轉(zhuǎn)子位置來控制電機(jī)的轉(zhuǎn)速,從而能夠?qū)﹄姍C(jī)運(yùn)行的轉(zhuǎn)速進(jìn)行調(diào)節(jié)。這種控制技術(shù)的系統(tǒng)可行性更高,而且因?yàn)橐恍┘夹g(shù)方法使用比較簡單,成本就比較低,是值得廣泛使用的。
猜你喜歡
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
上海大中型電機(jī)(2017年4期)2017-02-06 05:27:06
汽車工程學(xué)報(bào)(2016年5期)2017-01-16 02:42:50
計(jì)算技術(shù)與自動(dòng)化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識(shí)與技術(shù)(2016年13期)2016-06-29 21:41:37
照明工程學(xué)報(bào)(2016年3期)2016-06-01 12:17:56
科技視界(2016年12期)2016-05-25 11:07:56