工業機器人在柔性生產線中的應用
2019-09-10 19:54:57王林偉欒宇航李朔王攀登李鈺清
名城繪 2019年12期
關鍵詞:應用
王林偉 欒宇航 李朔 王攀登 李鈺清

摘要:柔性生產線是通過通訊網絡把多臺可控的數控機床聯結起來,配以自動輸送裝置組成的生產線。它依靠中央控制臺管理,可以混合多種生產模式,從而減少生產成本做到物盡其用。工業機器人充當了柔性生產線的自動輸送裝置的主力,廣泛應用在碼垛作業、密封作業等。本文主要分析了工業機器人的優勢,并探討了工業機器人在柔性生產線中的應用,可供參考。
關鍵詞:工業機器人;柔性生產線;應用
1工業機器人的優勢分析
第一,提高生產效率與產品質量。機器人可迅速從一個作業位置移動到下一個作業位置,尤其是垂直多關節、水平多關節機器人可實現高速移動;與人工相比,機器人能夠24小時不間斷工作,并且提高產品質量,降低了勞動力成本。第二,可充分發揮系統的通用性。可輕松適應多種機型,便于轉換到新機型,隨意改變機器人的動作,充分發揮柔性制造系統的通用性。第三,調試時的故障少,可縮短調試時間,系統調試可很快完成。工業機器人屬高自由度的通用產品,可靠性高,且能靈活適應新系統。第四,隨著人口紅利的逐漸下降,企業用工成本不斷上漲,引入工業機器人可大大降低勞動力成本并把操作人員從簡單作業、工傷事故中解放出來。
2工業機器人在柔性生產線中的應用
2.1碼垛作業
碼垛機器人是用在工業生產過程中執行大批量工件、包裝件的獲取、搬運、碼垛、拆垛等任務的一類工業機器人。碼垛作業主要在產品出廠工序和倉庫的貯存保管時進行該項作業,將幾個產品放在托板或箱內,在產品出廠或倉庫貯存保管時使用。如果靠人工搬運數量龐大的產品,不僅是一項艱巨的任務,作業效率也非常低。使用碼垛機器人就能在短時間內按照訂單將各類產品大量、迅速地堆積在托板上交付。
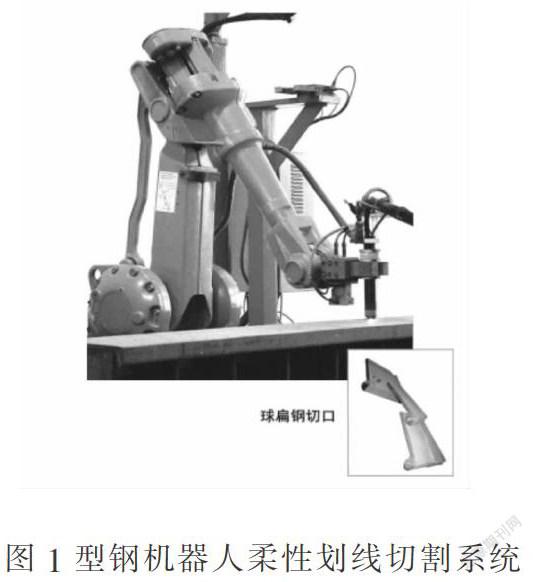
2.2澆口切割作業
澆口切割作業主要是切割塑料注塑成型時產生的澆口,在機械手前端裝上切割工具(剪鉗等)進行作業。為了切割位于復雜位置處的澆口,使用可適應各種姿勢的具有5軸、6軸自由度垂直多關節機器人。如圖1所示為型鋼機器人柔性劃線切割系統,其用途及特點為:型鋼自由放置,機器人可自由移動進行劃線切割;通過激光位移傳感器對型鋼進行三維檢測獲得加工圖形的坐標數據;可離線編程;加工圖形位置偏差通過計算機和機器人控制器即時通訊等。
2.3密封作業
密封作業機器人在機械手前端安裝涂敷頭,進行密封劑、填料、焊料涂敷等作業,必須對密封部位進行連續、均勻涂敷。因此,進行示教、編程時必須考慮涂敷作業的技術。例如,須處理好涂敷開始時的行走等待時間、涂敷停止時間、確保軌跡精度等因素。以繼電器密封涂膠機器人(如圖2所示)為例。
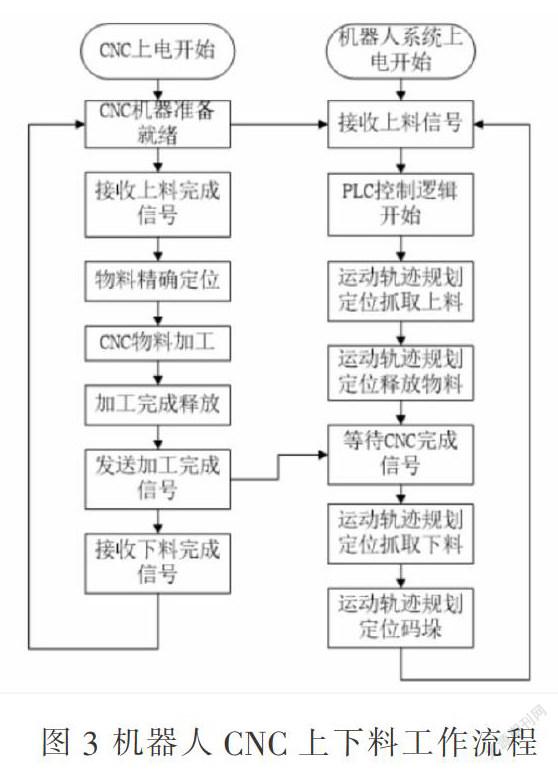
2.4機床自動上下料作業
工業機器人CNC柔性生產線的核心內容為多機器設備的協同作業,PLC可編程控制器通過平臺中傳感器網絡實現對各設備的狀態及參數的收集,使用kalman濾波算法實現對平臺中的運動對象序列測算出該坐標位置及運行速率,并采用以太網TCP/IP通信網絡實現對設備的精確同步控制,其控制工作流程圖如圖3所示。
2.5潔凈室作業
隨著制造技術的發展,(半導體)晶片和液晶玻璃日趨大型化,半導體制造工序和液晶制造工序等需要非常清潔的環境,通常在“潔凈室”這個特別的空間中運行,此類用途中一般使用潔凈機器人。潔凈機器人就是在工作時不產生灰塵(塵埃)的機器人。為此,伺服系統全部采用AC伺服,旋轉部分均作了密封處理。此外,還通過真空裝置將機器人內部的粉塵排放到潔凈室的外部。表示潔凈程度時使用“潔凈度等級”,例如“潔凈度等級10(0.3μm)”,表示每立方英尺內所含直徑0.3μm以上的塵埃為10個以下的潔凈程度。
3結語
總之,柔性制造與智能制造已然變成高端制作的標記,是將來公司進展的新趨向,所有未來發展歸根究底都是要工業機器人智能技藝發展做支撐。
參考文獻:
[1]許鵬輝.工業機器人在機械制造中的應用[J].中外企業家.2015(09).
[2]任燕.工業機器人在柔性生產線中的應用[J].自動化與儀器儀表,2015,(10):86-88.
(作者單位:沈陽工學院機械工程與自動化學院)
作者簡介:王林偉(1992.6.18),性別:男;籍貫:遼寧朝陽;民族:漢;學歷:研究生、碩士;職稱:助教;職務:無;研究方向:礦山機械。
猜你喜歡
科技視界(2016年21期)2016-10-17 19:54:47
科技視界(2016年21期)2016-10-17 19:54:05
科技視界(2016年21期)2016-10-17 18:46:46
科技視界(2016年21期)2016-10-17 18:37:58
科技視界(2016年21期)2016-10-17 18:28:05
考試周刊(2016年76期)2016-10-09 08:45:44
大學教育(2016年9期)2016-10-09 08:28:55
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01