基于Pure Pursuit算法的智能縮微車路徑跟蹤
2019-09-10 07:22:44何俊龍杜峰關志偉袁也
現代信息科技 2019年1期
何俊龍 杜峰 關志偉 袁也









摘? 要:為實現縮微智能車沿預設路徑穩定行駛,本文以多傳感器縮微智能車為載體,搭建了1套包含無線通信系統、視頻監控系統、終端控制系統的縮微道路交通實驗臺,實現了圖像數據處理、道路識別跟蹤、路徑規劃判斷以及運動控制執行等主要功能。重點研究了縮微智能車路徑跟蹤的Pure Pursuit控制算法,該算法能實時調整縮微智能車當前位置與預設路徑之間的偏差,從而使得縮微智能車的航向在一定程度上能與預設路徑保持一致。實驗結果表明:Pure Pursuit算法響應速度快、超調量小,縮微智能車能更快速穩定地實現路徑跟蹤。
關鍵詞:縮微智能車;Pure Pursuit算法;路徑跟蹤
中圖分類號:TP273? ? ? 文獻標識碼:A 文章編號:2096-4706(2019)01-0147-04
Path Tracking of Micro Intelligent Vehicle Based on the Pure Pursuit Algorithm
HE Junlong,DU Feng,GUAN Zhiwei,YUAN Ye
(School of Automobile and Transportation,Tianjin University of Technology and Education,Tianjin? 300222,China)
Abstract:In order to realize the stable driving along the preset path of the miniature intelligent vehicle,a set of miniature road traffic experimental platform including wireless communication system,video surveillance system and terminal control system is built based on the multi-sensor miniature intelligent vehicle. The image data processing, road recognition and tracking,path planning judgment and motion control are realized. Main functions such as system execution. This paper focuses on the Pure Pursuit control algorithm for path tracking of miniature intelligent vehicle. This algorithm can adjust the deviation between the current position and the preset path of miniature intelligent vehicle in real time,so that the heading of miniature intelligent vehicle can be consistent with the preset path to a certain extent. The experimental results show that the Pure Pursuit algorithm has fast response speed and small overshoot,and the miniature intelligent vehicle can realize the path tracking more quickly and steadily.
Keywords:micro intelligent vehicle;Pure Pursuit algorithm;path tracking
0? 引? 言
路徑跟蹤是指在無人駕駛情況下,對智能車轉向系統進行自動控制,使智能車能夠沿期望路徑行駛。根據車載傳感器種類,路徑跟蹤系統分為預瞄式系統和非預瞄式系統[1]。路徑跟蹤的控制方法大致可分為兩種:第一種是基于車輛運動學,將期望路徑轉化為車輛動力學物理量,然后將轉化得出的物理量作為被控對象;第二種方法是將車輛與期望路徑間的橫向或航向偏差作為控制算法輸入量,常用算法有Pure Pursuit和增量式PID控制[2]。
根據實車路徑跟蹤實驗中的成本、時間及安全等因素,本文搭建了1個包含車、道路的縮微交通環境實驗平臺。實驗中,根據智能縮微車與規劃路徑間的幾何位置關系,確定預瞄點的位置,然后采用Pure Pursuit算法算出前輪偏角控制量,從而實現對規劃路徑的跟蹤。
1? 基于Pure Pursuit算法的橫向控制
1.1? Pure Pursuit算法原理
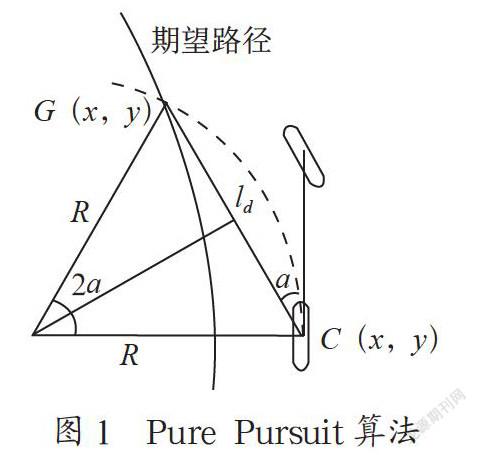
Pure Pursuit算法在機器人路徑跟蹤算法中應用廣泛[3]。該算法通過控制智能縮微車前輪偏角δ,使縮微智能車能夠盡可能沿著一條經過預瞄點的路線行駛,如圖1所示。
1.3? 預瞄點的確定
基于Pure Pursuit算法的路徑跟蹤,是以智能縮微車當前位置為圓心,預瞄距離為半徑做圓。該圓與規劃路徑存在相交、相切和相離三種位置關系,如圖2所示。根據智能縮微車當前路徑與預設路徑之間的位置關系,可以確定預瞄點的位置,進而通過Pure Pursuit算法算出前輪偏角控制量,實現路徑跟蹤。
當智能縮微車偏離期望路徑,可通過調整智能縮微車航向角與期望路徑間的夾角α,來修正前輪偏角,使智能縮微車向期望路徑方向行駛。
2? 轉向控制器的設計
2.1? 建立轉向控制器模型
轉向控制系統是一個雙閉環控制系統,該系統由控制器、舵機、霍爾元件和光電編碼器組成。位置環的輸出值是電流環的輸入值,霍爾元件可實時檢測控制器輸出給舵機的電流值,電流環跟定輸入值與反饋值進行比較,控制器調節兩者差值后輸出給舵機。位置環的輸入值是控制器發送給舵機的期望位置,光電編碼器可實時檢測舵機的位置,然后反饋給控制器,從而對舵機進行控制。PID控制是當前應用最為廣泛的控制系統。它不僅結構簡單,算法容易實現,而且還具有較好的魯棒性[5]。考慮到縮微智能車的控制精度,本文選取增量式PID控制作為縮微智能車的底層控制器。
增量式PID的實現公式為:
2.2? 整定PID控制器參數
本文采用試湊法進行PID控制器參數的整定,步驟如下:
(1)先進行比例控制,暫令ki=0,kd=0,根據舵機轉角期望值設定參數kp,觀察整定曲線及縮微智能車轉向效果,對比例系統kp進行調整,當得到接近于期望轉角的平滑曲線時,確定舵機轉向的響應速度是否滿足要求;
(2)轉向響應速度滿足要求后,加入微分控制。在已經確定好比例系數kp的基礎上,多次調整kd,確保轉向靈敏度的同時觀察縮微智能車在轉向過程中是否有抖動現象;
(3)在PID控制的基礎上,加入積分控制,以此提高控制系統的精度,觀察縮微智能車實際航向角變化,得出一組適用于縮微智能車控制系統的PID整定參數。
通過多次實驗,最終確定控制系統的3個參數kp、ki、kd分別取值1.5、10、15,該組參數已經用于實驗室智能縮微車仿真實驗平臺,并取得了較為滿意的效果。
3? 仿真分析與實驗驗證
3.1? 搭建縮微道路環境實驗平臺
縮微道路環境實驗平臺包含車、路兩大部分。其中智能縮微車為1:10比例的仿真車模,設計速度為0m/s~3m/s,智能縮微車如圖3所示。
該車主要包含以下模塊:攝像頭、光電傳感器、刷卡器等感知模塊、WiFi通信模塊、電源模塊以及工業主板、單片機及控制電路等決策與控制模塊。
縮微道路交通實驗臺如圖4所示,該實驗平臺長3m,寬2m,包括車道線、信號燈、U形彎、收費站等多種道路特征。實驗平臺面積越小,對車載控制器的靈敏度及其穩定性要求就越高,開展這方面的研究,有非常重要的科研及教學意義。
3.2? 仿真分析
仿真實驗分為兩組,第一組實驗設定智能小車的速度為1m/s,第2組實驗將智能小車的速度設定為3m/s。已知車體初始位置和航向角,根據車輛運動學模型計算下一時刻車體的位置和航向角。
根據下列公式可計算出下一時刻車體位置和航向角。
式中:x,y為車體位置;θ為航向角;δ為前輪偏角;v為車速;k為當前時刻;k+1為下一時刻。
圖5分別對應智能縮微車速度為1m/s和3m/s時,前輪偏角控制隨時間變化的曲線。仿真結果表明,Pure Pursuit算法在不同車速下均能實現對期望路徑的良好跟蹤。
從圖5可以看出,雖然車速提高,預瞄距離會隨之增大,可以使縮微車提前對前方道路信息進行處理,但是前輪偏角也隨著速度的增大而增大,這會影響縮微車轉彎時的穩定性,因此在實際應用中,應該降低縮微車的轉彎速度,確保其平穩通過彎道。
3.3? 實驗驗證
縮微車上安裝的讀卡器可以與道路上的射頻卡進行信息交互,將縮微車的位置信息反饋給上位機。根據所得到的位置及航向角,利用Pure Pursuit算法計算前輪偏角控制量,使縮微車按期望路徑行駛。車速分別為1m/s和3m/s時,Pure Pursuit算法路徑跟蹤曲線如圖6所示。
實驗得出:當車速為3m/s,縮微車跟蹤直線道路的最大偏差為0.12m,跟蹤彎道的最大偏差約為0.2m;當車速為1m/s,縮微車跟蹤直線道路的最大偏差為0.05m,跟蹤彎道的最大偏差約為0.15m。實驗結果證明:本文所采用的Pure Pursuit算法,很好地實現了不同車速下對期望路徑的跟蹤,縮微車的轉向系統能夠快速、準確地對舵機的轉角進行控制。總而言之,在路徑跟蹤過程中,縮微車能夠更加穩定地沿著預設路徑行駛。
4? 結? 論
本文首先通過縮微車參數和行駛速度確定預瞄距離,然后根據預設目標點的位置和縮微智能車當前位置確定預瞄點,基于Pure Pursuit算法,在MATLAB上完成了路徑跟蹤仿真,仿真結果表明該算法在不同車速條件下都能夠確保縮微車轉向系統,快速、準確地對舵機進行控制。
根據縮微車反饋到上位機的車輛位置及航向角等參數,在搭建的縮微道路實驗環境中實現了縮微車的路徑跟蹤,跟蹤過程中路徑偏差較小且縮微車擺動幅度適中,確保了縮微車在行駛過程中的穩定性。
參考文獻:
[1] 段建民,楊晨,石慧.基于Pure Pursuit算法的智能車路徑跟蹤 [J].北京工業大學學報,2016,42(9):1301-1306.
[2] 段建民,夏天,宋志雪.基于聯合仿真的智能車路徑跟蹤控制研究 [J].計算機仿真,2017,34(6):129-134+151.
[3] 王勇.Pure Pursuit算法在移動機器人路徑跟蹤的位姿修正研究 [J].物流科技,2018,41(8):69-70+91.
[4] 陸正辰.基于多縮微車的智能交通系統仿真平臺研究 [D].上海:上海交通大學,2013.
[5] 李林琛,蔣小平.基于PID控制的移動機器人路徑跟蹤 [J].激光雜志,2016,37(2):110-112.
[6] TAN Baocheng,LV Feng.Position and Attitude Alternate of Path Tracking Heading Control [J].Sensors & Transducers,2014,167(3):203-209.