糾錯復原型機器人教學案例研究
2019-09-10 07:22:44康斯雅?鐘柏昌
數字教育 2019年1期
康斯雅?鐘柏昌


摘 要:中小學機器人課程作為一門典型的工程教育類課程備受關注,如何在機器人教育中培養學生的工程設計思維和問題解決能力值得研究者思考。通過糾錯任務解決機器人產品中的問題,能夠促進學生理解機器人內部組成結構及功能,培養問題解決能力,獲取更深層的學習體驗。結合已有研究,文章嘗試將糾錯復原型教學模式應用于中小學機器人教育,通過感知與操作、拆分與分析、識別與診斷、測試與總結等步驟引導學生發現問題、思考問題并解決問題,旨在為機器人教育提供實踐參考。
關鍵詞:機器人教育;糾錯復原型教學模式;案例研究
中圖分類號:G4 文獻標志碼:A 文章編號:2096-0069(2019)01-0037-05
現階段中小學機器人教學過程大多數側重于模擬或模仿[1],參考相關機器人廠家提供的說明書進行零件安裝和項目學習[2]。盡管此方法可以讓學生掌握一些知識與技能,但是灌輸學習顯然不利于工程類學科的教育。機器人教育作為一種典型的工程教育之一,對學生問題解決的培養至關重要。學生通過課堂中對機器人的糾錯分析和動手實踐,可以有效感知和理解其操作原理,同時也能培養工程思維和問題解決能力。本文嘗試在教學過程中引入糾錯任務,針對機器人運行、避障、循跡等項目分別設計適合的教學內容,使機器人教育充分發揮教學價值。
一、糾錯復原型機器人教學特點及價值
糾錯,也稱故障檢測,是問題解決的一種常見形式。日常生產生活中的糾錯常指技術人員或專業人員通過診斷并修正故障,讓系統恢復至正常狀態[3]。機器人教育中的糾錯復原型教學模式是指將機器人的故障檢測與修復作為主要學習任務,使學生在檢測和調試機器人系統故障的過程中,分析故障原因(涉及機器人結構、傳感、控制、動力以及通信等不同方面),并設計和運用多種方案進行修正,以此解決機器人產品中的問題[4]。此模式以逆向工程思想、糾錯學習理論等為基礎,核心價值表現為幫助學生將所學知識應用于實際問題,積累經驗并提升工程設計能力。與傳統教學方式相比,糾錯復原型機器人教學模式具有以下特點:
一是機器人糾錯復原模型較為系統。糾錯復原型教學模式不以糾錯為最終目的,該模式強調問題的發現與解決,主張以糾錯復原的基本過程為教學主線,通過感知與操作、拆分與分析、識別與診斷、測試與總結等過程培養學生的工程設計及問題解決等能力。
二是機器人糾錯任務形式較為多樣。在實際教學應用中,糾錯包含兩個層面,第一個層面是機器人教學過程中自然發生的錯誤,第二個層面是教師人為設計的糾錯任務,為充分驗證糾錯復原型機器人教學模式的教學效果,本研究將重點采用人為設計的糾錯任務,但不排除自然發生的糾錯任務的教學優勢。
三是機器人糾錯涉及領域較為廣泛。機器人的故障檢測與修復存在于造型搭建領域、程序設計領域等,教師需針對不同領域分別設計糾錯內容。
二、糾錯復原型機器人教學案例設計
(一)糾錯復原型機器人教學方法設計
在機器人教育中,通過教師提供的故障產品培養學生的糾錯能力是必要的,此過程也為機器人理論知識應用于實際問題、提高學生的工程設計水平提供了新的途徑。糾錯復原型機器人教學過程具體體現為:感知與操作——拆分與分析——識別與診斷——測試與總結等,具體解釋如下:
1.感知與操作
本環節意在使學生投身機器人產品,通過對產品的感知提高興趣,以便進一步理解其結構和功能。不同于傳統的講授演示型教學,感知與操作過程可以讓學生自主探尋,減少對機器人產品的陌生感。
在機器人的造型搭建領域,感知與操作的載體體現在機器人的組成結構。教學開始時,學生感知和操作已損壞或功能缺失的機器人產品結構,為以后的機器人拆分與分析做準備;在機器人的程序設計領域,感知與操作的載體體現在機器人產品的程序指令,主要包括機器人實現的功能和已有程序的測試,此部分要求學生已經掌握機器人軟硬件操作相關的基礎知識和基本技能,顯然不適用于教學初期。
2.拆分與分析
拆分與分析,是指在對機器人拆解的過程中觀察各組成部分的結構,同時理解各部分的存在意義。本環節的重點在于通過動手操作分析機器人的結構和功能,使學生結合逆向思維理解產品的設計過程,并嘗試尋找故障根源。
在機器人的造型搭建領域,拆分與分析體現在機器人結構的拆解、測量和記錄。在分析和揣摩別人安裝過程中推斷產品的設計意圖,并嘗試尋找故障根源。在機器人的程序設計領域,此步驟側重于執行程序的拆分與分析,學生將基于已有基礎和教師的引導對功能實現的代碼進行結構拆分,分析和記錄故障指令與作用,并構思實現該功能所需要的正確執行代碼,為下一步故障代碼的識別與診斷做好準備。
3.識別與診斷
識別與診斷是解決故障根源過程中非常重要的環節。很多學生能夠發現故障根源,但在解決問題時會遇到困難,因此該環節旨在培養學生的工程設計和問題解決能力,使學生在發現問題后可呈現出有效的解決方案。
在機器人的造型搭建領域,識別與診斷是指學生識別出機器人結構搭建的錯誤所在,結合各零部件的測量和記錄梳理修正故障所需要的材料,并經過思考與討論對可執行的修改方案做出判斷;在機器人的程序設計領域,該過程是指通過上一環節中分析和記錄的指令功能,對故障指令進行篩選并提出修改意見、完善診斷報告。
4.測試與總結
糾錯復原型機器人教學的最終物化成果是修正存在故障的機器人產品,本環節的教學旨在結合診斷報告,在分析產品需求、投資、安全、生產、能源及綜合性因素之后選出最優方案進行檢驗測試以獲得更深層的學習體驗[5]。此環節在工程設計過程中至關重要,不斷地完善故障機器人的造型或程序可以增加成就感,反復的調試過程會使學生掌握真實經驗,有利于提高解決實際問題的能力。
在實際教學過程中,該步驟不僅包括學生對機器人糾錯與復原全過程的感悟與總結,也包括教師對本節課教學內容的總結、教學知識的回顧以及課程的評價,其中課程評價包括與機器人課程內容相符的能力水平標準測試、參考以往研究設計的機器人學習態度調查、多維度的機器人作品評價以及課后訪談等方法[6]。教師可以通過以上多方面的評價進行教學設計的反思和調整,其中的能力水平標準測試和機器人作品評價也有利于學生鞏固課程中學習的知識,從而不斷提高教學質量。
(二)糾錯復原型機器人教學案例設計
在本研究中,糾錯復原型機器人案例設計主要考慮如下因素:教學項目的趣味性和可行性,教學內容的探索性和連貫性。
首先,教學項目的選擇需符合中小學生的特點,更具趣味性的項目會吸引學生的注意力,使其充分投入到教學內容中來。但仍需結合學生的學習情況實施復雜的糾錯項目,否則不僅無法解決已有問題還會增加學生的挫敗感,因此在設計項目時要充分考慮實施過程的復雜程度,以平衡學生的學習動機和執行能力。
其次,教學內容的設計可以從生活實際出發,使學生在掌握知識和技能的基礎上,激發學習機器人的積極性,進一步探索機器人的奧秘。結合已有知識,循序漸進地引導學生參與到發現問題、解決問題的過程中,為提高學習效率、培養工程設計思想和問題解決能力提供可能。
三、糾錯復原型機器人教學案例設計應用
這里以“探測巡線走”的教學為例,介紹糾錯復原型機器人教學案例的設計及應用。
(一)方案設計
1.教學內容與學生情況分析
本節課“探測巡線走”的教學重點是實現探測機器人的巡線行進,主要涉及的傳感器是巡線傳感器,教學對象是小學五年級的學生。總體而言,該學段位于學習機器人的初級階段,側重于機器人基本知識與基本技能的掌握。前面幾節課,學生學習了探測機器人的拆裝步驟和電機的原理及應用,熟練掌握了機器人的造型搭建和程序編寫上傳至機器人的流程,對探測機器人有了濃厚的學習興趣。與初學者相比,在動手操作與編程能力方面都有了顯著的提升。
2.教學目標
在知識與技能方面,要求學生了解巡線傳感器具備的功能和運行原理,學會在mBlock圖形化編程軟件中使用巡線傳感器等指令實現巡線功能,并了解巡線功能在日常生活中的現實意義。
在過程與方法方面,要求學生在掌握巡線傳感器原理的基礎上,理解相關指令代碼的功能與意義,并通過糾錯復原的過程實現探測機器人的巡線功能。
在情感、態度與價值觀方面,要求學生通過修改并完善程序指令,感受程序設計的操作過程,使學生了解機器人課程并不只是簡單的搭建,激發對機器人進一步探索的積極性。
3.可選方案的設計與選擇
基于教學內容可知,本節課主要是使學生理解巡線傳感器原理,實現探測機器人巡線功能,本文初步設計以下幾種教學方案,如表1所示。筆者在綜合幾種方案的優缺點、實際教學時間,并分析五年級學生的學習情況之后,最終選擇了方案一。先由教師介紹巡線傳感器的原理及應用,接著下發人為設計的故障巡線程序,隨后展開糾錯復原教學過程。
(二)教學實踐
1.復習與導入
本環節主要是帶領學生回顧上節課學習的電機原理及應用,引導學生從程序設計的角度去分析機器人的執行過程。教師以巡線傳感器在現實生活中的應用為例,導入本節課的教學重點——實現機器人巡線功能,并播放探測機器人巡線走的視頻,以便教學的展開。
2.講解與拋疑
本環節的第一部分是向學生介紹巡線傳感器的工作原理,讓學生了解到巡線傳感器上有兩個傳感器,每個傳感器上包含紅外發射LED和紅外感應晶體管,而機器人正是利用傳感器的信號才能在白底背景上巡線前進。隨后向學生解釋可以巡黑線是因為紅外光線的反射特性,引導學生了解光的反射和信號傳輸等相關知識。
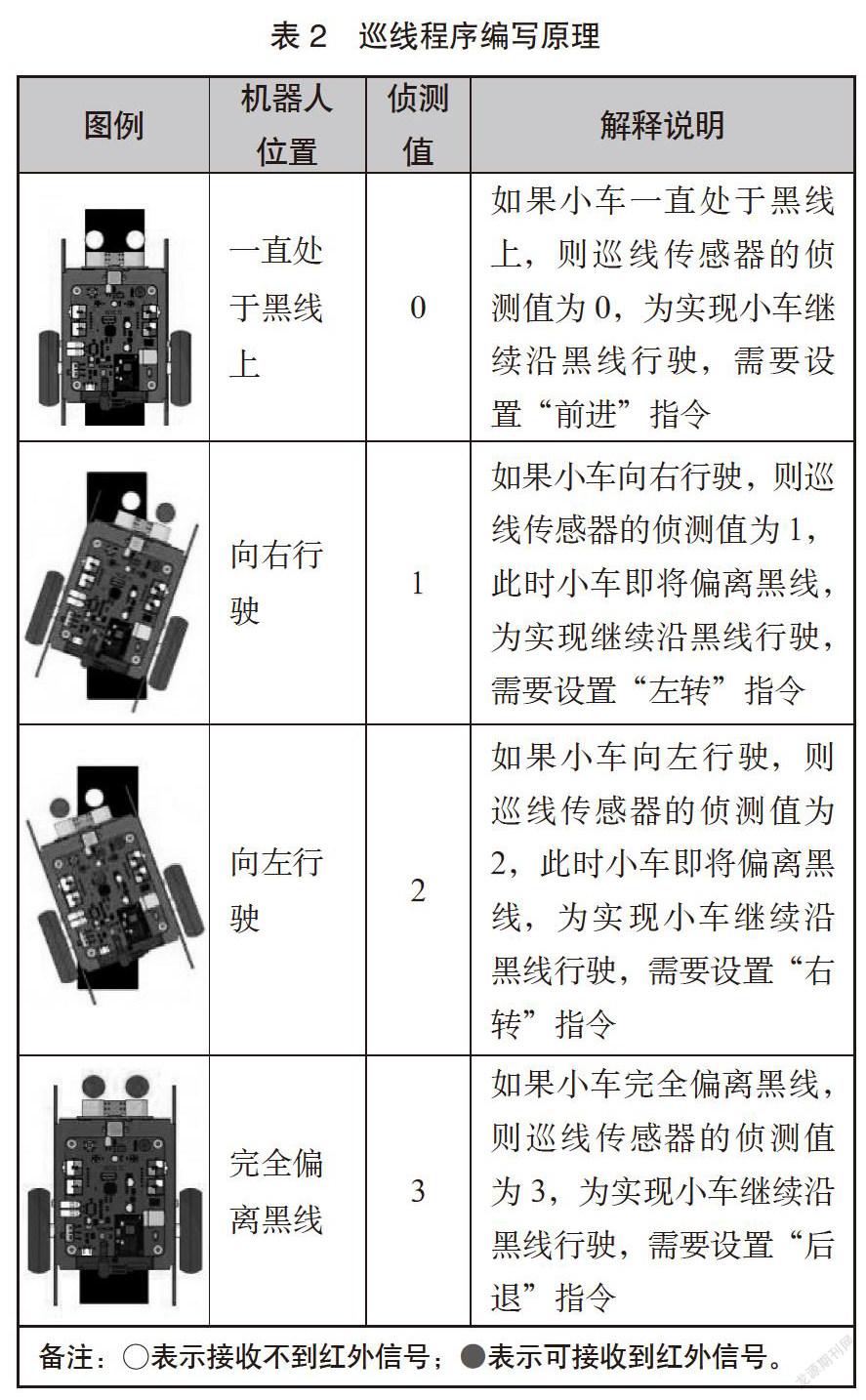
第二部分是向學生介紹通過mBlock圖形化編程軟件實現探測機器人巡線走的原理,如表2所示。教師通過講解機器人巡線功能與編程指令之間的關聯,使學生進一步感知程序設計的原理,為之后的程序糾錯做鋪墊。
學生掌握了實現機器人巡線功能的原理之后,第三部分是由教師下發紙質版路線示意圖(以小組為單位)和存在故障的程序(以個人為單位),如圖1和2所示,為之后的糾錯復原過程做好準備。
3.感知與操作
本環節是在前一環節的基礎上對機器人進行的自主探究學習。學生以小組為單位領取探測機器人,并對接收的故障程序進行測試。
4.拆分與分析
在本環節中,學生仍以小組為單位,基于已有知識以及教師的指導,對故障代碼進行結構拆分,并分析和記錄相關指令及功能。通過組內商討對填寫的指令功能達成統一意見,依次記錄指令分析的序號、名稱及功能。
5.識別與診斷
本環節是上一環節的延續,側重于識別故障指令中的錯誤。學生以個人為單位依次記錄序號、指令名稱和修改意見,填寫好之后與組內同學協商,并達成統一意見,為下一步測試做準備。
6.測試與總結
本環節共包含四個部分,第一部分是學生根據識別與診斷表格對程序代碼進行迭代的修改和測試,同時教師負責觀察各組的修改意見是否正確;第二部分是時間截止后,成功調試出巡線功能的小組進行演示,并講解指令修改意見;第三部分是教師對本節課下發的代碼進行故障講解,并下發代碼文件,講解正確代碼的結構和功能;第四部分是教學效果的評價,包括能力水平標準測試、問題解決能力問卷調查等。
(三)教學反思
從實際教學效果來看,學生對巡線傳感器的使用、程序代碼的修改和編寫掌握得比較扎實,這主要源于學生學習機器人的興趣。不同于以往的講授演示型教學,從故障代碼出發更容易調動學生的積極性,使學生在學習過程中注重發現問題和解決問題。當然,本節課也有需要改進的地方,比如課堂教學時間的把控、如何引導學生進行遷移創新等,希望能夠再次完善教學過程,以便呈現更好的教學效果。
四、小結
學生在“探測巡線走”的學習過程中深入探索,嘗試發現和解決問題。提供給學生存在故障的機器人或程序代碼,以糾錯復原型教學模式進行知識與技能的學習,有益于幫助學生掌握機器人相關知識、自主地探索與發現。本研究著力于機器人的教學實踐,通過糾錯復原型機器人項目的開發和應用探討更多的教學模式的可行性,為中小學機器人教學模式提供一種新的參考。
[1]閆妮,鐘柏昌.中小學機器人教育的核心理論研究:論發明創造型教學模式[J].電化教育研究,2018,39(04):66-72.
[2]韓蕾,李婷婷,鐘柏昌.基于GOMS的趣味交互型機器人教學案例設計研究[J]. 數字教育,2016,2(6):61-66.
[3]JONASSER D H,HUNG W.Learning to Troubleshoot:A New Theory-based Design Architecture[J].Educational Psychology Review(S1040-726X),2006,18(1):77-114.
[4][5][6]李婷婷,鐘柏昌.中小學機器人教育的核心理論研究:論實驗模擬型教學模式[J].電化教育研究,2017,38(9):96-101.
Case Study on Error Correction and Recovery Robot Teaching
KANG Siya,ZHONG Baichang
(School of Education Science,Nanjing Normal University,Nanjing,Jiangsu,China 210097)
Abstract: The robotic curriculum of primary and secondary schools has attracted much attention as a typical engineering education course.How to cultivate students’engineering design thinking and problem-solving ability in robot education is worthy of researchers’thinking.Solving problems existed in robot products through error correction tasks can help students understand the internal structure and functions of robots,cultivate their problem-solving skills,and gain a deeper learning experience.Combined with existing research,this paper attempts to apply the error correction and recovery teaching mode to primary and secondary school robot education.Through the steps of perception and operation,splitting and analysis,recognition and diagnosis,testing and summarization,the students are guided to discover problems,think about problems and solve problems,hoping to provide a practical reference for robot education.
Key words:? robot education;error correction and recovery teaching mode;case study
