淺談農機自動駕駛比例電磁閥精細控制的優化方法
2019-09-10 17:44:56劉榮國
今日農業 2019年7期
關鍵詞:方法

摘要:目前使用的單PWM對比例電磁閥進行控制的方法存在著控制精度不高,且電流波紋較大等問題,在很大程度上影響了農機的使用質量。因此,本文主要提出了使用雙PWM控制比例電磁閥的方法,結果表明:使用雙PWM控制比例電磁閥能夠提高其控制的精確度,并有效將比例電磁閥中的電流波紋減小,從而避免了電流波紋對比例電磁閥造成的沖擊,也讓電磁閥的壽命增加,帶動了相關產業的進一步發展。
關鍵詞:農機自動駕駛;比例電磁閥;精細控制;方法
中圖分類號:S220
文獻標識碼:A
隨著我國社會經濟的發展,科學技術的不斷進步,中國農業在發展的過程中,實現其精準作業的重要環節,也就是農機的自動導航,該類科技的發展提高了農業生產的效率,同時也對相關的生產者的綜合素質有了更高的要求,不斷加快和提高作業速度、作業精度以及作業質量要求農機的駕駛人員的操作水平更加精細。因此,不斷增大了駕駛者的工作負荷,相關的農機駕駛者可能會因為疲勞駕駛,從而對生產作業的質量造成了嚴重的影響。而目前農機自動導航技術能夠有效解決這一類問題,所以受到了我國很多學者的重視,并開展了更加深入的研究,自動導航技術包括應用計算機現代控制、電子電器等各個方面的領域,而運用比例電磁閥是自動導航技術重要的部分。
1比例電磁閥的概述
比例電磁閥的工作原理主要是比例電磁閥中的電磁鐵根據工作人員輸入的電壓信號和電流信號進行相應的動作,從而移動工作閥的閥芯改變閥口尺寸,讓其能夠與輸出的電壓形成比例,主要是對動力輸出進行控制,在目前我國非道路機械當中比例電磁閥得到了非常廣泛的運用,其中特別是在挖掘機和拖拉機動力換擋上引用。目前比較常見的控制比例電磁閥的方法是脈沖寬度調制控制方法,也就是PWM控制技術,通過在比例電磁閥的兩端增加一個可以調控的脈沖信號,將脈沖的寬度進行調整,從而把線圈的電流改變,讓控制執行元件的目的達到。在一般情況下這種控制方法一般采用單PWM進行控制,因為在這種控制方法中比例電磁閥線圈會產生較大的波紋電流,所以其控制的精度較低,在換擋的過程中會出現比較明顯的速度變化,從而導致機械在運行的過程中產生頓挫感,會使比例電磁閥受到巨大的沖擊,最終導致比例電磁閥的使用壽命不長。為了有效解決單PWM技術存在的缺陷,提高農機在自動駕駛過程中的操作精度,本文主要設計了一個雙PWM控制比例電磁閥的技術,希望能夠減小線圈的波紋電流,讓比例變電磁閥得到更加精確的控制,從而在使用的過程中更加快速和穩定。
2相關的原理及其方法
2.1使用雙PWM技術的過程
PWM屬于一種模擬控制的方法,通過改變相應的荷載,對晶體管基極或者金屬氧化物半導體管柵極的偏置進行調制,從而將晶體管或者金屬氧化物半導體管的導通時間改變,讓電壓的輸出更加穩定,這種模擬控制的方法能夠讓電源在輸出電壓時的工作條件保持恒定的現象,是一種使用微處理的數字信號控制模擬電路的一種有效的方法技術。
在周期PWM(T)中低電平持續的時間表示位Toff,高電平持續的時間則為Ton,占空比為D,所以可以得出以下公式:
Toff= T-Ton, (l)
D=Ton/T. (2)
4個持續相同時間的資周期組成一個完整的PWM周期,當每個子周期的子狀態結束時,都會出現PWM的電平轉換工序,并且子周期也會遵循PWM的相關調制方法,將四個子周期按照a、b、c、d進行定義,可以列出以下幾個公式:
Ta=Tb=Tc=Td=T/4, (3)
Taon+Tbon+Tcon+Tdon=Ton, (4)
Taoff+Tboff+Tcoff+Tdoff=Toff, (5)
Da=Taon/Ta, (6)
Db=Tbon/Tb, (7)
Dc=Tcon/Tc, (8)
Dd=Tdon/Td, (9)
其中子周期表是Tx,子周期的高電平持續時間為Txon,子周期低電平持續的時間為Txoff,子周期的占空比為Dx。
適當將波形進行調整,可以得出以下幾個公式。
Taon=Tbon(=Ty+Tz), (10)
Taoff=Tboff, (11)
Tcon=Tdon(=Ty-Tz), (12)
Tcoff=Tdoff. (13)
其中,Ty表示第一次PWM的時間,Tz表示是第二次PWM的時間,也就是電流波紋調整后的時間,如果能夠同時滿足Ty+Tz小于T/4,且Ty≠Tz,以及Ty、Tz都大于0,根據以上(2)(4)(10)(12)四個公式可以將占空比D表示為:
D=Ton/T=(Ty+Tz+Ty+Tz+Ty-Tz+Ty-Tz) /T=4×Ty/T
此公式當中,(4×Ty)表示在一個T周期內PWM的高電平持續的總的時間,對比例電磁閥的平均電流進行著嚴格的控制,并且該式中的Tz不會對最終的占空比D造成影響。
2.2分析實驗的相關原理
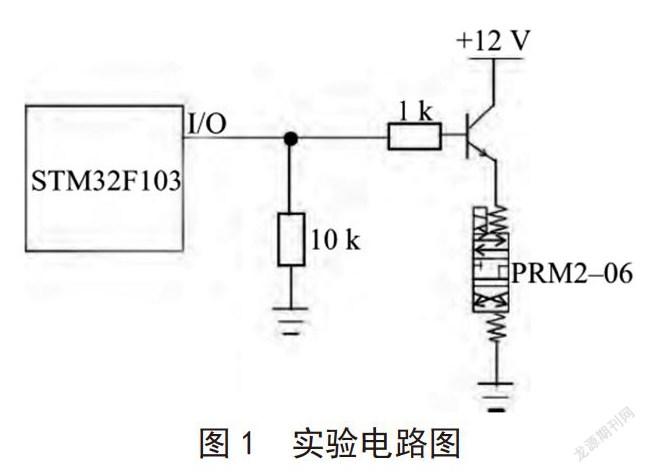
在本文的研究當中,PWM的信號輸出源采用的是STM32F103的微控制器,該微控制器內的內核有72MHZ,快速的I/O口有80個,定時器有7個以及PWM的輸出有6個,這種微調控器還能夠支持進行串行線調試,以及JTAG兩種調試的模式,在微控制器的一個輸出口輸出控制的信號,讓比例電磁閥的閥芯開始運動,整個實驗的電路圖如圖1所示。
比較常用的單PWM控制方法就是在比例電磁閥的兩端加入一個單PWM,通過對脈沖寬度進行調整,從而改變線圈的電流,但是這種控制比例電磁閥的方法,電磁閥線圈會產生較大的波紋電流,所以控制的精度較低,而雙PWM的控制方法則是將一個PWM的周期分成4個時間持續相同的周期,當子狀態結束的時候利用一個PWM的電平轉換進行轉換工作,同時在4個字周期內PWM也會進行繼續控制,并且該子周期都會遵循PWM的調制方法。經過相關的研究表明,單PWM的控制方法與雙PWM控制的方法一個周期內的高電平持續總時間相同,但是其在經過兩次的調制之后,就會對電流的波紋進行有效的調整,在電路實驗電路中,采用的電磁閥線圈的電壓為12V,其電流為2.5A,電阻為2.3Ω,溫度為20℃,相關的控制特性如圖2、圖3所示。
由圖2、圖3可以看出,電磁閥線圈控制的特性與電流、電壓呈現線性發展的關系,當電流和電壓被控制在控制的過程中其波動的幅度越大,則電磁閥的波動也會增大,對整體的控制精度造成了嚴重的影響。
3結束語
隨著社會經濟的不斷發展,科學技術的不斷進步,農機的自動化駕駛在很大程度上提高了農業生產的效益。因此,比例電磁閥的控制更加精細是目前比例電磁閥研究的重要內容。目前市場上對比例電磁閥所采用的控制方法是單PWM控制,存在一定的缺陷,而通過采用雙PWM技術的控制方法能夠有效提升比例電磁閥的控制精度。本文通過研究可以知道二次調制PWM讓比例電磁閥的控制精度有效提升,如果對其進行三次或者多次調整,則可能會進一步減少比例電磁閥產生的電流波紋,不斷提高比例電磁閥的控制精度,讓農機的使用壽命增長。
參考文獻:
[1]耿彪,李歡,方慧,等.農機自動駕駛比例電磁閥精細控制的優化方法[J].浙江大學學報(農業與生命科學版),2018,44(4):440-444.
作者簡介:劉榮國(1983-),男,山東省萊蕪市,本科,工程師,研究方向:農業機械化及其自動化。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
