一種基于光子計數激光雷達的去噪方法
2019-09-10 02:00:08劉金鵬
艦船電子對抗 2019年4期
關鍵詞:信號
方 劍,佘 忱,劉金鵬
(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225101)
0 引 言
激光雷達通過測量激光信號的時間差獲取目標的距離,通過機械掃描、光學相控陣或焦平面陣列獲取目標的點云數據并進行三維成像。光子計數型激光雷達引入單光子探測器件和時間相關單光子計數(TCSPC)技術,使系統具有探測極微弱光信號的能力和皮秒量級的時間分辨率。激光雷達的噪聲大致分為3類:探測器噪聲、放大器噪聲、背景的輻射噪聲。隨著制造工藝和致冷方式的進步,探測器噪聲和放大器噪聲得到有效抑制,所以如何抑制背景噪聲,改善激光雷達在低信噪比下的成像質量成為關鍵問題[1-2]。
文獻[3]中將目標漫反射回的激光信號均分為2路,分別送至雪崩光電二極管(APD)中進行探測,2個APD的輸出連接至與邏輯結構,通過與邏輯比較2個APD探測到光信號的時間差來濾除噪聲,獲取清晰的三維圖像。文獻[4]在理論上進一步分析了這種雙探測器結構的性能并指出:對于雙探測器結構,與邏輯可很好地抑制虛警,或邏輯可提高目標探測概率;與或邏輯相結合,可獲得更高的目標探測概率和更低的虛警率。
然而,采用雙探測器結構時,回波信號需要經過分束器分成2束,當回波信號強度較弱時,會降低目標的探測概率;或邏輯提高目標探測概率的同時也提高了虛警率;與或邏輯相結合時,需要用到4個探測器,這無疑會使系統結構變得復雜,同時也引入更多由探測器時間抖動帶來的誤差。
本文分析了信號光子和噪聲光子在時間相關性上的差異,提出了一種去噪方法,在不增加系統結構復雜度的基礎上能減小測距誤差,改善成像質量。
1 系統組成和原理
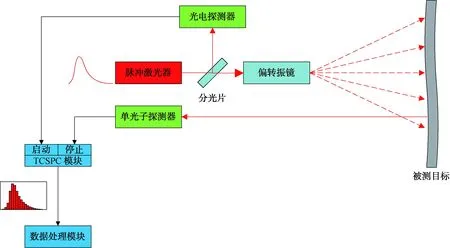
圖1 光子計數激光雷達系統框圖
光子計數激光雷達的系統框圖如圖1所示。
其基本原理是:脈沖激光器發射的激光首先經過分光片分為兩部分:其中一小部分用來觸發光電探測器,在計時電路中產生開始信號;其余部分通過振鏡偏轉后射向被測目標,經目標漫反射后進入接收光學系統并觸發單光子探測器,在計時電路中產生停止信號。TCSPC模塊計算2個信號的時間差即為該次脈沖的飛行時間(TOF),經過大量脈沖周期的重復探測,得到該掃描點光子數隨飛行時間分布的數據,并傳輸給數據處理模塊進行計算以及后續成像。
在實際應用中,為了抑制背景噪聲,一方面會在接收光學系統的鏡頭前加上窄帶濾光片;另一方面會設定一個距離門,即給單光子探測器添加一個門控信號,探測器僅在門控信號有效時才工作,其余時間不工作。然而,當背景噪聲較強時,在距離門內仍會引入噪聲,此時需要去噪預處理。
2 去噪方法理論
噪聲光子的飛行時間是隨機分布的,互不相關,而目標漫反射回的信號光子的飛行時間是相對集中的,且主要集中在脈寬范圍內,利用二者差異可以進行去噪處理。
TCSPC模塊中將時間軸劃分為具有相同寬度的時間單元,其寬度即為時間分辨率,每次計算得到的飛行時間在對應的時間單元進行累加,最終得到光子數隨時間分布的直方圖,如圖2所示。
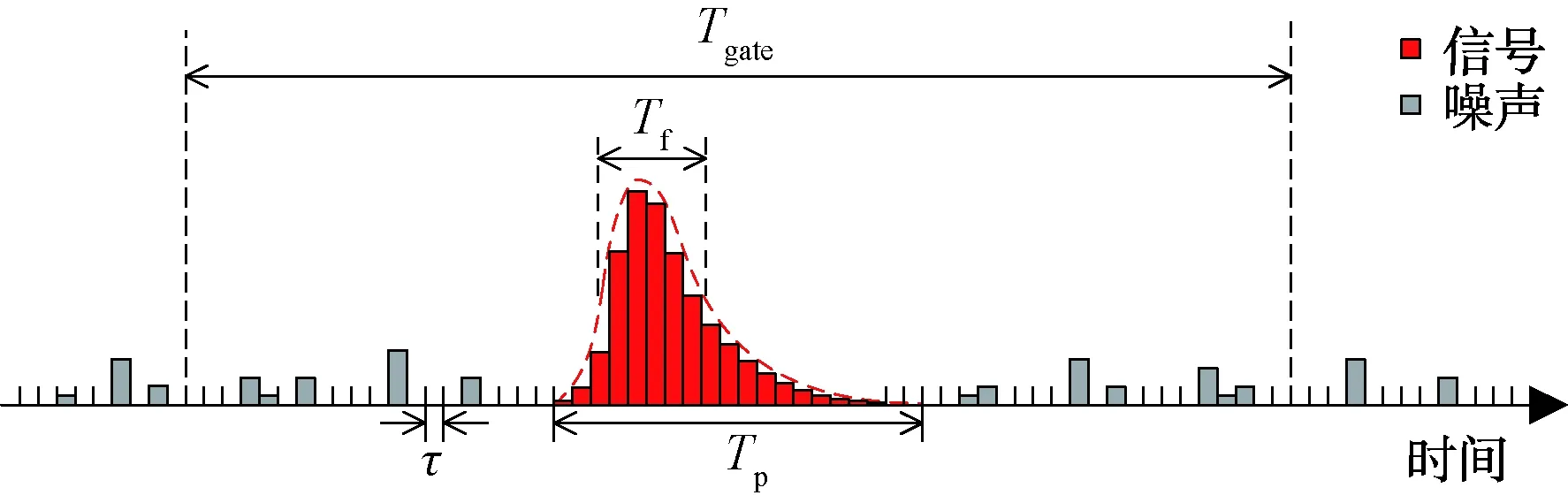
圖2 TCSPC模塊中光子數隨時間分布的直方圖
記時間分辨率為τ,距離門的持續時間為Tgate,回波脈沖持續時間為Tp,回波脈寬為Tf。以距離門內探測到的光子為研究對象,當探測到光子時,記該光子是信號光子和噪聲光子的概率分別為Psignal和Pnoise,則:
Psignal+Pnoise=1
(1)
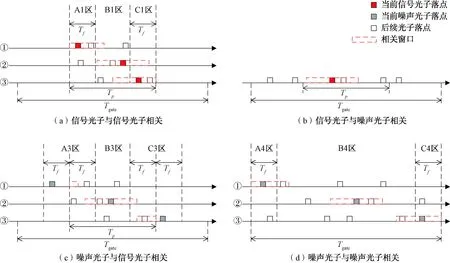
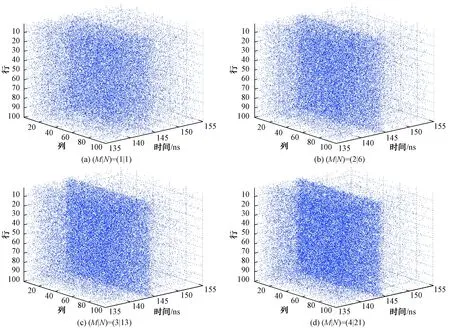
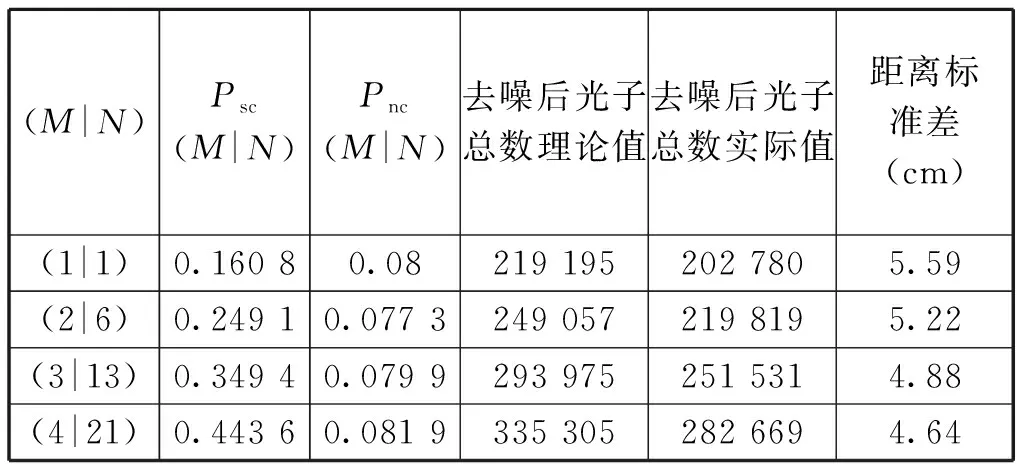
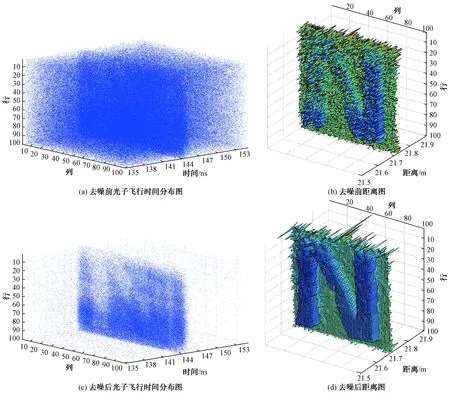
定義滿足|T| 為了方便推導,假設信號光子是均勻落在目標時間單元的,即信號光子以同樣的概率落在Tp所包含的時間單元,同時噪聲光子以同樣的概率落在Tgate所包含的時間單元。 總共有4種情況需要考慮,如圖3所示。 圖3 2個光子相關的4種情況 圖中黑色方塊表示當前信號光子的落點,灰色方塊表示當前噪聲光子的落點,白色方塊表示后續到達光子的落點,后續光子只有落在相關窗口范圍內2個光子才相關。 (1) 信號光子與信號光子相關的概率Pss 在Tp內共有Tp/τ個目標時間單元,當前信號光子落在這每個時間單元的概率都為τ/Tp。 ①當前信號光子落在A1區內時,不同的落點對應的相關窗口大小也不同,隨著落點從左往右變化,對應相關窗口的大小從Tf逐漸增大為2Tf,遞增量為τ。從概率角度講就是,在A1區內隨著當前信號光子的落點從左往右變化,后續信號光子和它相關的概率從Tf/Tp逐漸增大為2Tf/Tp,遞增量為τ/Tp; ②當前信號光子落在B1區內時,不同的落點對應的相關窗口大小都為2Tf,即后續信號光子和它相關概率都為2Tf/Tp; ③當前信號光子落在C1區內時,情形與落在A1區內相反,隨著落點從左往右變化,后續信號光子和它相關的概率從2Tf/Tp逐漸減小為Tf/Tp,遞減量為τ/Tp。 綜上得到: (2) 化簡得: (3) 近似得: (4) (2) 信號光子與噪聲光子相關的概率Psn 無論當前信號光子的落點在哪,對應的相關窗口大小都為2Tf,即后續噪聲光子和它相關的概率都為2Tf/Tgate,得: (5) (3) 噪聲光子與信號光子相關的概率Pns 當前噪聲光子只有落在A3、B3、C3區時才能和后續信號光子相關,在這些區域內共有(Tp+2Tf)/τ個時間單元,當前噪聲光子落在每個時間單元的概率都為τ/Tgate。 ①當前噪聲光子落在A3區內時,隨著落點從左往右變化,后續信號光子和它相關的概率從0逐漸增大為2Tf/Tp,遞增量為τ/Tp; ②當前噪聲光子落在B3區內時,后續信號光子和它相關概率都為2Tf/Tp; ③當前噪聲光子落在C3區內時,情形與落在A3區內相反,隨著落點從左往右變化,后續信號光子和它相關的概率從2Tf/Tp逐漸減小為0,遞減量為τ/Tp。 綜上得到: (6) 化簡得: (7) 近似得: (8) (4) 噪聲光子與噪聲光子相關Pnn: 推導過程與情況(1)類似,用Pnoise和Tgate分別代替式(5)中的Psignal和Tp,得: (9) 由上述推導可得信號光子和后續光子相關的概率Psc: Psc=Pss+Psn=Psignal× (10) 噪聲光子和后續光子相關的概率Pnc: (11) 由時間相關單光子計數的原理可知,每一次對光子的探測都是一次獨立的測量,當前探測到的光子是信號光子還是噪聲光子并不影響后續探測到光子的種類,即信號光子和噪聲光子與任何一個光子相關的概率都為Psc和Pnc,與多個光子相關的概率為多重伯努利實驗。記信號光子和噪聲光子在N個光子中和M個以上光子相關的概率分別為Psc(M|N)和Pnc(M|N),則: (12) (13) 去噪方法的條件為:對于某一光子,在與它相鄰的前N個光子中,如果有M個以上光子與它相關,則認為該光子是信號光子并保留,反之濾除。 實驗中半導體脈沖激光器波長為830 nm,頻率為2.5 MHz,脈沖能量在10~100 pJ可調,回波脈寬Tf在800 ps左右,回波脈沖持續時間Tp約為3倍的Tf。被測目標為白色墻面,距離約為21 m,距離門作用時間范圍為135~155 ns,Tgate為20 ns。為了模擬低信噪比的情況,將激光器的脈沖能量調小,并將接收光路暴露在日光燈的照射下。 為了得到距離門內信號和噪聲的探測概率,對墻面分別在關閉和開啟激光的條件下進行了測試,測試時長100 ms,距離門內探測到的光子數分別在3 900個和4 700個的水平,計算可得Pnoise=3 900/4 700=0.83,Psignal=0.17。 在打開激光的條件下,對墻面進行了100×100像素的掃描,每個像素點的測試時長為5 ms,總共返回的光子數為2 338 428個,將這些光子的飛行時間做圖后,得到的三維分布圖如圖4所示。 圖4 墻面100×100像素掃描光子飛行時間分布圖 從圖4可見,由于背景噪聲較強,距離門內充滿了噪聲,墻面信息也不明顯。對此用上述方法進行去噪,計算得Psc=0.16,Pnc=0.08,為了對比去噪效果,我們將Pnc(M|N)維持在相近水平,(M|N)分別取 (1|1)、(2|6)、(3|13)、(4|21),去噪后的光子飛行時間三維分布圖如圖5所示,去噪后的相關數據計算值如表1所示。 圖5 不同(M|N)取值時去噪效果對比圖 (M|N)Psc(M|N)Pnc(M|N)去噪后光子總數理論值去噪后光子總數實際值距離標準差(cm)(1|1)0.160 80.08219 195202 7805.59(2|6)0.249 10.077 3249 057219 8195.22(3|13)0.349 40.079 9293 975251 5314.88(4|21)0.443 60.081 9335 305282 6694.64 從圖5可見,去噪后距離門內噪聲明顯減小,Psc(M|N)和Pnc(M|N)實際代表的就是信號光子和噪聲光子被保留的概率,當Pnc(M|N)維持在相近水平時,隨著Psc(M|N)的增大,距離門內保留的信號光子越來越多,墻面信息也越發明顯。表1中給出了去噪后光子總數的理論值和實際值,以及10 000個像素點計算距離后距離的標準差,可以看出,隨著Psc(M|N)的增大,距離標準差越來越小。去噪后光子總數理論值和實際值偏差的原因主要有2個:一是信號光子并非均勻分布在目標時間單元,而是呈近高斯分布;二是打開激光時,激光的后向散射也會引入噪聲。 進一步在墻上固定了一個“N”形的硬紙板,硬紙板一半白色一半黑色,距離墻面5 cm,如圖6所示。墻面、紙板白色部分、紙板黑色部分反射率之比約為1.9∶1.6∶1,對其進行100×100像素的掃描,每個像素點的測試時長為5 ms,總共返回的光子數為3 062 290個。 圖6 “N”形硬紙板 這里以每個像素點返回光子數的平均值306個來計算Pnoise和Psignal,噪聲水平與之前一致,計算得Pnoise=(3 900/20)/306=0.637,Psignal=0.363,Psc=0.253,Pnc=0.08。若以Psc(M|N)≥0.5,Pnc(M|N)≤0.1為去噪條件,則(M|N)取(3|11),Psc(3|11)=0.552 8,Pnc(3|11)=0.051 9,去噪前后的光子飛行時間分布和距離如圖7所示。 圖7 去噪前后對比圖 從圖7可以看出,去噪前,紙板里色部分反射率低,受噪聲影響較大,距離圖中的成像效果不理想,與墻面的區分不如紙板白色部分明顯。去噪后,距離門內絕大部分噪聲被濾除,距離圖中紙板里色部分得以凸顯出來,“N”形輪廓清晰,同時距離圖中的平面部分也更加平整。 這里是用每個像素點返回光子數的平均值來計算Pnoise和Psignal,而不是用每個像素點實際返回的光子數來計算。這樣做主要是因為在低信噪比時,由于噪聲的波動會使某些像素點在打開激光時返回光子數的水平比不開激光時還低,不便進行后續計算,返回光子數的平均值實際也表征了被測區域反射率的平均水平。 本文分析了信號光子和噪聲光子在時間相關性上的差異并進行了概率推導,提出了一種去噪方法。該方法無需對系統光路進行改動,也不增加額外的探測器。實驗結果表明該方法可以減小測距誤差,改善成像質量,對光子計數激光雷達的應用具有實際參考價值。2.1 概率推導
2.2 去噪方法
3 實驗結果和分析


4 結束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06