基于微機控制的潮汐車道智能路障管理研究
2019-09-10 14:55:34楊昕宇
理論與創新 2019年9期

【摘要】潮汐車道是近年來處理潮汐車流的較好的辦法,國際上主流的潮汐車道通行管理方案采用的是水馬隔離墩式的“拉鏈式”潮汐車道;據悉這種潮汐車道上線后,可以有效減少原路段交通擁堵30%。但是高昂的設置成本讓許多城市望而止步,本文提出了一種新型的倒伏式路障代替水馬隔離墩且能夠自動控制的潮汐車道管理方案。其優點在于能夠自動控制,提高經濟效益,避障安全以及社會效益等方面。
【關鍵詞】潮汐車道;倒伏式路障;微機
引言
近年來國內車輛數量猛增,城市里面利用在早晚高峰或者其他特殊時期車流量的雙向行駛的不同特點在原有的道路基礎上設計了潮汐車道,以應對高峰時期單向車流量劇增的問題。現在主流的潮汐車道管理方案是利用輔助車輛和龍門架交通燈以及潮汐車道出入口的控制燈對車道內的車輛通行進行管理,但在交通高峰時期,即便有了信號燈的控制,但潮汐車道實際交通擁堵在所難免。
當前,道路交通擁堵已成為城市發展到一定階段所面臨的世界性難題。2017年由高德地圖交通大數據發布平臺聯合交通運輸部科學研究院、阿里云等單位聯合發布的《中國主要城市交通分析報告》北京的高峰擁堵延時指數為2.067 (高峰擁堵延時指數等于市民高峰擁堵時期所花費的時間與暢通時期所花費時間的比值) 。為保持城市良性發展, 緩解道路交通擁堵問題已是刻不容緩。
1研究背景
1.1國內現狀分析
城市道路主要的擁堵來源是潮汐交通,以深圳市為例,在潮汐交通的情況下,單向的車流量劇增,常規單向的車道無法滿足潮汐車輛的交通需求,從而導致了交通變緩,交通堵塞。目前,設置潮汐車道是主流的解決該問題的方法。常規潮汐車道只能夠在交通信號控制層面對潮汐車道進行管理。
1.2國外現狀研究
國際上主流的應對潮汐車道通行管理方案采用的是水馬隔離墩式的“拉鏈式”潮汐車道,國金門大橋“吞吐式”的“拉鏈車”就用了這種模式。據悉這種潮汐車道上線后,可以有效減少原路段交通擁堵30%。由于拉鏈車采用的是工程車挪動水馬隔離墩的方式來變換車道,當它進入車道開始作業時,會占用一條車道的空間長達7~8分鐘,在此時間段內車道通行受到限制。其次,單一的工程車就需要168萬,再加上配套設施、人工成本以及維護成本加起來將是一筆不菲的資金。
2作品具體方案
本文就潮汐車道實體自主變道在“拉鏈式”潮汐車道的基礎上提出了一個新方案:將實體的水馬隔離墩替換成可自動控制的實體倒伏式路障來管理潮汐車道。它的成本比“拉鏈車”更低;省去了拉鏈車的維護成本以及人員操作成本增加了社會經濟效益。利用微機控制效率更高,反應更快。微機可以控制多個路障同時工作,節省車道變道的時間。
2.1控制部分
(1)微機
微機采用arduino電子開源平臺,UNO R3是整個系統的指令終端,向驅動板傳輸指令來驅動交通信號源以及路障的升降。平臺終端可以通過預存程序自動控制,交通后臺控制,道路實時現場控制;控制優先級依次遞增,即道路實時現場控制為最高優先級。
(2)程序設置
預存程序預先編寫并燒錄進終端,后臺可以隨時控制終端的工作與停機,并在停機時可以通過控制端口實現數據的傳輸程序指令,當終端收到后臺傳輸程序的指定端口的數據時,燒錄驅動程序啟動,并在指令傳輸完畢時,燒錄程序開始進行。用這樣的方式達到后臺對終端程序的修改操作,依道路反饋給后臺的數據,后臺對原有控制程序進行修改,并更新程序。
(3)實時調控
后臺直接控制終端連接的驅動系統,在特定的情況下(例如終端硬件設備更換)避免整個潮汐車道路障系統的罷工,同時通過后臺控制驅動可以直接為救援工作,搶險救災等特殊任務車輛提供一條臨時的暢通車道。
交通后臺的控制可以實現交通的宏觀調整,緩解城市部分道路不能通行或者交通嚴重擁堵帶來的局部交通問題。現場實時調控用來應對道路交通事故或其他因交通設備問題帶來的路段局部交通擁堵。在數據采集器與駕駛員的配合下,后臺協同現場實時調控可以更加精準地協調車道內的交通,精準定位并進行局部疏導。
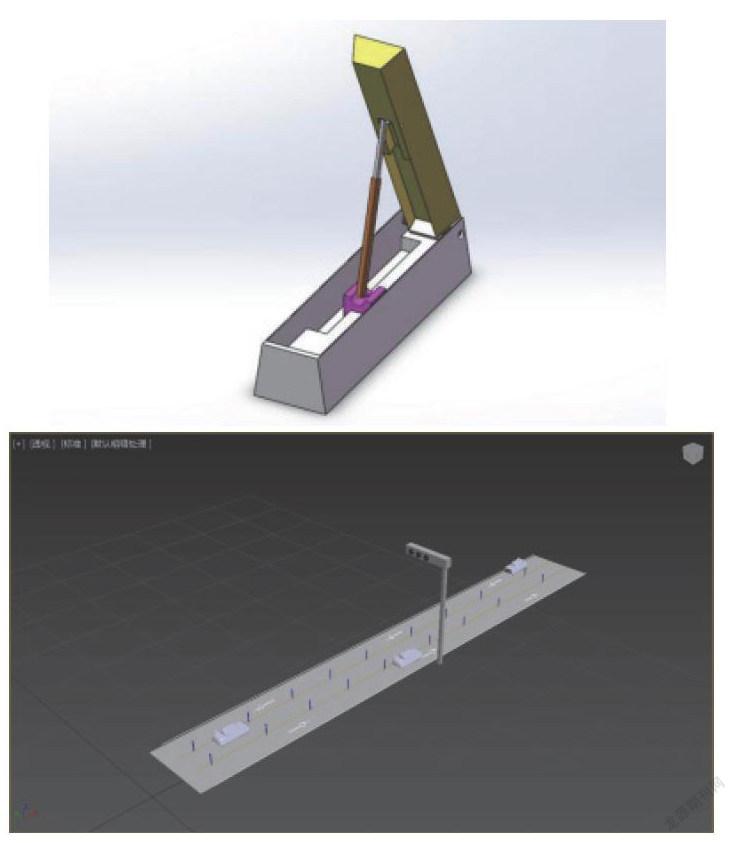
2.2路障部分
路障采用嵌入式結構安裝在路面內,安裝槽需要進行防滲水處理,路障倒伏狀態與路面基本持平,且略低于路面。路障升起狀態時通過滑塊的聯動作用把防塵蓋彈出,擋住路障升起產生的凹陷。
(1)結構支撐
路障設計為斜拉式液壓傳動路障,外殼采用PVC材料制成,固定結構及支撐結構采用碳素鋼材料制成。路障斜拉桿為矩形設計,內含超聲波測距模塊以及三色指示燈模塊。基座分為內外兩層,內層是結構支承層,外層是PVC材料層。
(2)液壓傳動
結構支承層內含有路障的機械聯動裝置,驅動模塊及液壓驅動裝置。液壓傳動設計能夠提供更大的升力力矩,使用液壓傳動使整個動力裝置結構變得簡單可靠,更容易控制。液壓裝置由電機作為源動力輸出,電動機結合小型變速齒輪組,得到更大的動力,更緩的速度,再由減速輪組驅動液壓泵,推動液壓活塞前進。
(3)燈光指示
斜拉桿外部貼有警示反光條,讓駕駛人員更容易辨識車道,更容易駕駛。內部有超聲波測距模塊以及三色指示燈模塊。
三色燈指示模塊設計反映路障的實時狀態:路障故障或者遇到行為障礙時紅燈閃爍,并反饋后臺;路障即將改變斜拉桿狀態或正在改變斜拉桿狀態時黃燈閃爍;當路障動作完成時,綠燈常亮。
三色燈指示模塊作為交通引導信號:在光線不足或可見度不高時利用流水燈原理,讓各路障某一種燈光按照路障排列次序依次閃爍可以起到道路交通引導作用。交通情況良好,路障綠燈按照車道車輛前進方向在車輛左端依次閃爍;道路情況比較擁堵,黃燈依次閃爍;道路不可通行,出現交通事故,紅燈常亮。
(4)超聲波避障
超聲波模塊由驅動直接控制,且在驅動接到改變斜拉桿位置的指令時一直工作,直到指令結束。超聲波測距模塊設計為了避免路障對車道上車輛或者其他東西的擦掛,當超聲波測距模塊收到反射波且判定“距離過近”時,超聲波測距模塊反饋信息給驅動,并暫停斜拉桿當前動作。同時反饋給終端,終端配合現場信息采集系統確定位置,結合車輛定位系統,通過車輛導航系統提示該路障附近車輛。
(5)路障安裝
安裝位置:汽車行駛方向為參考方向,路障平行于車流量安裝在潮汐車道線位置。固定方式:打孔螺絲直接固定,參考減速帶施工標準安裝方法。防水防污處理:漏斗式設計將電子元件部分與路障槽口隔開,在路障出于升起的狀態下彈出蓋子,利用滑塊的聯動作用,將雨水或污物推出裝置。
3項目分析與評價
3.1 實現自動控制
程序員只需要在早晚高峰時期預先將時間設定,到達相應的時間微機就控制液壓驅動模塊控制路障的動作從而實現自動控制。經實測,模型自動控制可以實現,能夠通過無線的方式(Bluetooth)進行行為干預。
3.2增加社會效益
在特殊情況下可以通過其他控制手段對車道進行通行控制。對于突發的事件,該車道的反應更加迅速,更加靈敏,更加靈活,在高峰通行時期為特殊車輛通行爭取寶貴的黃金時間。
3.3提高經濟效益
美國金門大橋“自動化潮汐車道”造價高達300萬美元, 實施整個“自動化潮汐車道”共花費3千萬美金。深圳潮汐車道中, “拉鏈車”作業速度為5-10公里/小時, 其造價168萬, 各項維護費用也需要大筆資。
3.4安全性
經實測,采用超聲波測距自主避障有效,且在車輛移速較慢及車輛快速起步的時候反應靈敏,避免了路障設施對車輛的傷害。
4創新目標及數據算法
以成都市為例,據《2018 Q1中國主要城市交通分析報告》最擁堵的路段是人民南路四段:機場高速出入口到一環路南二段,長度1.7千米,高峰平均時速19.47km/h。如果將該路段63%可建設路段建設此可變潮汐車道,長度約1.07km。根據計算,可減少擁堵13.6%,高峰平均時速將提升至22.54km/h,平均提速15.75%。高峰平均通行時間將由之前5.2分鐘縮短至4.5分鐘。
若向成都市推行,在主要早晚高峰路段建40%可變潮汐車道,預計將減少交通擁堵7.34%,提高平均車速2.03km/h。將成都市高峰擁堵延時系數由1.81下降至1.68(即早晚高峰路上花費時間是暢通狀態下的1.68倍)。
4.1計算依據:
設某長度為s的單向i車道路段,高峰時段平均車速為v,平均車距為c,車距與車速呈現正相關,相關系數u,平均通車時間t。
則 ;
該路段車輛總數m為:
當建設潮汐車道則為i+1,有:
節約通行時間n為:
減少交通擁堵p為:
參考文獻
[1]韓光胤 楊美霞 特約記者 楊天駿 通訊員 范楊 交通新聞網-智慧治堵:城市交通治理新實踐[J] 2018.5.23
[2]高德地圖 期刊 2018年度中國主要城市交通分析報告[J] 2019.1.16
[3]曹靜, 宮建, 楊孝寬.解決北京市潮汐性交通擁堵的措施研究[J].武漢理工大學學報, 2009, 33 (6) :1116-1119.
[4]摘自:張若雯,冀強,崔媛媛,石佳.基于智能交通潮汐車道中可移動隔離帶的設計與實現[J].電腦知識與技術,2018,14(28):286-288.
作者簡介:楊昕宇(1999.6--),男,漢族,陜西富平人,本科,研究方向為交通設備與控制工程。
