掃地機器人自主導航專利技術(shù)綜述
2019-09-10 07:22:44高惠敏
科學導報·科學工程與電力 2019年43期
高惠敏
【摘 ?要】本文主要針對掃地機器人自主導航技術(shù)的發(fā)展,統(tǒng)計掃地機器人在全球范圍內(nèi)的專利申請,對其進行分析,并基于專利分析結(jié)果總結(jié)了技術(shù)分支以及國內(nèi)外重要申請人的技術(shù)路線,剖析掃地機器人自主導航的技術(shù)現(xiàn)狀。
【關鍵詞】掃地;機器人;自主導航;路徑規(guī)劃;室內(nèi)定位;環(huán)境感知;專利
一、前言
掃地機器人因其簡單的操作以及便利性,逐漸成為智能家居的一部分。掃地機器人通過自主導航技術(shù)實現(xiàn)路徑規(guī)劃以及避障,確保機器人能夠以較高覆蓋率以及低重復率完成清掃任務,這項技術(shù)需要傳感器、定位系統(tǒng)以及路徑規(guī)劃等多學科支持,是掃地機器人的技術(shù)核心。
二、掃地機器人技術(shù)概述
九十年代末至二十一世紀初,歐美日韓的家用電器制造商不約而同將研發(fā)火力投入智能掃地機器人市場。2001年家電巨頭ELECTROLUX推出三葉蟲智能掃地機器人,依靠單片機控制底部車輪自主行動,機體裝置的反射式超聲波傳感器為機器人提供避障能力。掃地機器人具有無監(jiān)督自主工作的特性,其原本只是能夠進行簡單的清掃等工作的單純機械設備,現(xiàn)在通過增加自動充電、路徑規(guī)劃、智能識別、智能交互等功能,成為智慧家庭中重要組成部分。掃地機器人是由傳感檢測系統(tǒng)、控制系統(tǒng)、移動和吸塵系統(tǒng)組成,其關鍵技術(shù)包括傳感器技術(shù)、室內(nèi)定位技術(shù)、路徑規(guī)劃技術(shù)和自動回充技術(shù)等。
三、掃地機器人的自主導航技術(shù)分支
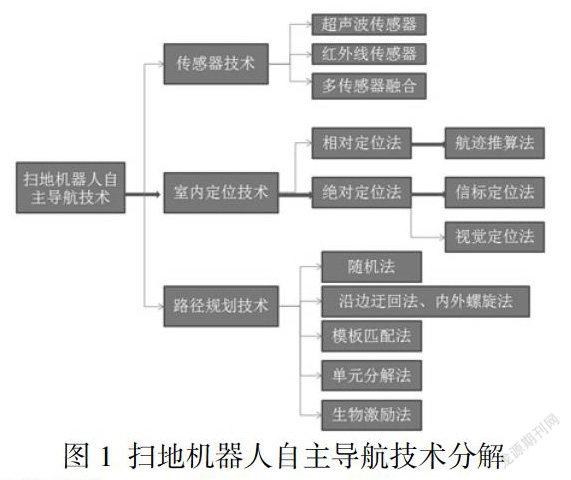
本文對掃地機器人自主導航技術(shù)的相關專利申請進行分析,基于CNABS、CNTXT中文數(shù)據(jù)庫以及DWPI數(shù)據(jù)庫,通過去噪、人工篩選、標引得到最終所要分析的專利數(shù)據(jù)樣本,通過瀏覽上述專利申請以及參考相關文獻,對所涉及的技術(shù)分支進行分解,如圖1所示。

四、專利現(xiàn)狀分析
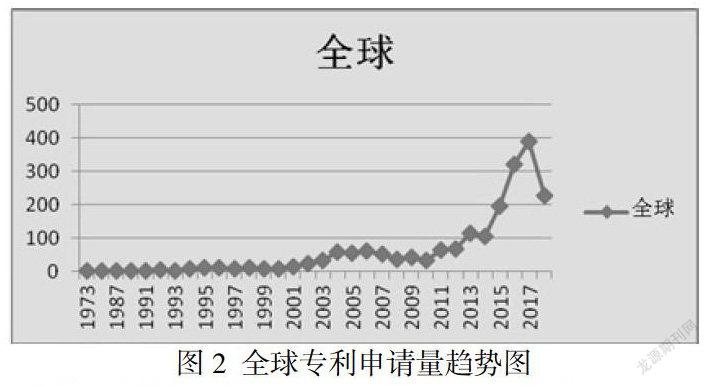
經(jīng)過檢索式檢索與簡單人工篩選,最終篩選出專利申請1633件。如圖2所示,在全球范圍內(nèi),最早的相關專利出現(xiàn)在1973年,但從1973-1993年的申請量較小,每年均在10件以下,處于技術(shù)探索時期。自1993年專利申請量緩慢增長,處于技術(shù)積累期,增長比較緩慢,隨著傳感技術(shù)、導航定位技術(shù)的發(fā)展以及市場需求,2011至今申請量呈現(xiàn)幾何增長狀態(tài),處于快速增長時期。國內(nèi)掃地機器人自主導航技術(shù)雖然起步較晚,但自2011年起專利申請量大幅增長,國內(nèi)申請在整個全球的申請量中所占的比重越來越高。

從全球?qū)@暾埖膰鴦e分布來看,中國、美國、韓國、日本、歐洲國家是專利申請的主要原創(chuàng)國,上述國家和地區(qū)的申請量占到了全球申請總量的98%,也正是創(chuàng)新能力突出的國家和地區(qū)。中國和韓國分別占全球申請總量的50%和27%左右。中國作為人口最多,發(fā)展?jié)摿ψ畲蟮牡貐^(qū),一直都是各個申請人主要的目標市場地區(qū)。韓國的三星、LG,美國的IROBOT,日本的日立、夏普、松下、富士通,德國的VORWERK,瑞典的ELECTROLUX以及英國的DYSON,各國企業(yè)競相發(fā)展,同時,中國國內(nèi)以科沃斯、美的為代表的企業(yè)等后起之秀,所占比重越來越高,中國在掃地機器人領域的發(fā)展已躋身世界先進水平。
五、技術(shù)發(fā)展脈絡與重點專利分析
本文分別從傳感器技術(shù)、室內(nèi)定位、路徑規(guī)劃這三個分支對技術(shù)發(fā)展的脈絡作相應梳理,同時對各分支的重點專利進行分析。
1、傳感器技術(shù)
三星公司在1993年提出一件公開號為US1993073398A的專利申請,該申請是較早的將通過超聲波傳感技術(shù)與定位導航結(jié)合的傳感器技術(shù)相關專利。機器人通過超聲波傳感器檢測與障礙物之間的距離,通過光學旋轉(zhuǎn)編碼器確定障礙物方向,機器人沿著房間外圍移動,然后根據(jù)選定的程序覆蓋到剩余的區(qū)域。1999年西門子公司提出了公開號為US6591216 B1的專利,該專利提出使用紅外線傳感器感知障礙物,以此來建立物體周圍環(huán)境的熱影像。2001年家電巨頭ELECTROLUX推出三葉蟲智能掃地機器人,依靠單片機控制底部車輪自主行動,機體裝置的反射式超聲波傳感器為機器人提供避障能力,但在靠近尖角障礙物時,由于超聲波反射的能力較少,難以檢測,容易發(fā)生碰撞。而紅外線傳感器也存在探測視角小、很難探測到前方狹小障礙物、透明物體或深色物體等缺點,為了更好的描述環(huán)境,多傳感器融合技術(shù)開始發(fā)展。三星公司在2012年提出一件公開號為EP2590042B1 B1的專利,其位置識別技術(shù)的研究主要表現(xiàn)在傳感器融合,通過多傳感器融合實現(xiàn)位置識別,提高位置估計的精度,進而通過濾波結(jié)構(gòu)實現(xiàn)定位。
2、室內(nèi)定位技術(shù)
科沃斯公司2002年在專利(CN2498979Y)中使用航跡推算法進行定位,但無法實現(xiàn)實時性精確定位。為了解決該問題,絕對定位技術(shù)開始急速發(fā)展。美國IROBOT公司提出(US8954192 B2)的專利申請,其使用信標定位法進行室內(nèi)定位,在機器人上安裝傳感器對信標進行觀測。隨著市場對定位的精確要求越來越高,基于視覺的機器人定位近年來成為研究熱點,中國各公司也開始重視該方面的研究與專利布局。基于視覺的定位主要包括單目視覺、雙目視覺。目前,基于視覺定位的掃地機器人也已有產(chǎn)品推出,Irobot和Dyson分別推出了高端系列RoomBa980和360Eye。
3、路徑規(guī)劃技術(shù)
作為智能掃地機器人核心功能技術(shù),規(guī)劃一條滿足任務要求的安全、有效、可行的路徑,成為各項相關專利的核心討論問題。早期掃地機器人多采用隨機路徑行進,如果不能建立環(huán)境地圖,就只能采用隨機路徑。三星公司于1993年提出的,公開號為GB2278937B的專利中提及一種導航控制系統(tǒng),采用沿邊迂回的方法行進,常用的方法還有內(nèi)外螺旋法等。雖然機器人路徑規(guī)劃已得到多領域長時間的關注,但至今智能掃地機器人仍沒有最佳的路徑規(guī)劃方案,由于環(huán)境的不確定性,要求機器人在規(guī)劃繞過障礙的前提下,還有自主避障的能力。近年來,如何實現(xiàn)全覆蓋路線規(guī)劃且提高效率與性價比,已成為研究熱點。全覆蓋路徑規(guī)劃方法多種多樣,各有優(yōu)劣,主要包括模板匹配法、單元分解法、人工勢場法和生物激勵法等。國內(nèi)的掃地機器人技術(shù)起步較晚,科沃斯公司的相關專利也大多使用隨機遍歷法進行清掃。
六、結(jié)束語
本文梳理了掃地機器人自主導航技術(shù)分支的發(fā)展情況,并對自主導航的核心專利和重要申請人進行分析,有助于審查員全面了解相關功能的基本發(fā)展態(tài)勢,對涉及掃地機器人領域的審查工作有一定幫助。
參考文獻:
[1]柴劍,智能掃地機器人技術(shù)的研究與實現(xiàn),西安電子科技大學,2013;
[2]朱冬梅,技術(shù)快速迭代掃地機器人行業(yè)洗牌在即,現(xiàn)代家電,2016
[3]薛瑞范,面向掃地機器人的室內(nèi)定位研究,哈爾濱工業(yè)大學,2015
(作者單位:國家知識產(chǎn)權(quán)局專利局專利審查協(xié)作四川中心)
